t13024
Изобретение относится к электро- и может быть использовано в npeiJjHзнойных и интегрирую цих приво- ах автоматики и вычислительной тех НИКИ.5
Целью изобререния является повышение точности и быстродействия настройки.,
На чертеже представлена блок-схема интегрирующего привода переменно- го тока, в котором реализуется пред- лaгae &ш способ.
Интегрирующий привод содержит исполнительный двигатель 1 асинхронный тахогенератор 2, вал которого соединен с валом исполнительного дви-- гателя 1, усилитель 3, элемент 4 сравнения, масштабируюшдй задающий блок 5, фазирующий задающий блок 6, делительный задатчик 7 напряжения,, -0 реверсивный переключатель 8 с входным развязываюн1 м трансформатором,, масштабирующий компенсируюкгий блок У, фазирующий компенсирующий блок 10,, се-- лективный нуль-индикатор 11, вход ко торого подключен к выходу элемента 4 сравнения и к входу усилителя 3, выход которого подключен к входу исполнительного двигателя 1 блок 12 контрсля скорости двигателя с
15
30
Входы реверсивного переключателя 8, масштабирующего компенсирующего блока 9, фазирующего компенсирующего блока 10 и асинхронного тахогенерато ра 2 подключены к сети переменного тока, реверсивного переключателя 8 через соединенные последовательно масштабирующий задающий блок 5 делительный задатчик 7 напряжения, фазирующий задающий блок 6 подключен к одному входу элемента 4 сравнения, другой вход которого подключен к выходам асинхронного тахогенератора 2. масштабирующего компенсирующего блока 9 и фазирующего комленсир пощего блока 10. Блок 12 контроля скорости молсет быть выполнен в виде стробота- хометра,
Способ настройки реализуется еле- д аоицим образом.
После устранения автоколебаний привода через реверсивный переключатель 8 на, вход масштабирующего задаю щего блока 5 подается переменное кап ряжение. Подборы уровня входного сигнала с помощью масштабирующего задающего блока 5 и делительного задат чика 7 добиваются тогод чтобы при
прямом направлении вращения двигателя 1 скорость вращения привода была близка к максимальной, например составляла 0,852, и стгюбоскопическое изображение вращения диска и стробо- тахометра 12 бьио неподвижно.
В этом случае ск(5ростная погреш- iOCTb привода равна нулю„ С помощью фазируюгцего задаю1Л,его блока 6 обеспе- чи1зается минимальное показание нуль- индикатора 11., т,е. фазируют входной сигна.п„ Проверяют значение скорости ,-,вигателя 1 л в случае необходимости устанавливают ее з-аланное значение с помоиц- ю блока 5„ Затем реверсивным перерслючателем 8 изменяют фазу вход- аого сигнала на 18G , т.е. реверсиру- io i двигатель 1 . Име;сщуюся при этом ошибку по скорости, измеренную стро- ботахометром 12, уменьшают вдвое, при сохраггении ее знака, изменением уров- напряжения с выхода г- асштабиру1още- I D компенсиру 0ще о блока 9, При об- рат}{ом направлении вращения уменьшают вдвое величину напряжения на нуль- цндикаторе 1 i без изменения знака путем изменения выходного 1апряжекия фазовог о компеисирую. лего блока 10. И)5оверяют значение скорости и напряжения и при необходимости вновь устанавливают требуе гоге их значения с г оуощью блоков 9 и 10.
Затем переключателем 8 устанавливают первона - а.льпоб:5 прямое направление вра1цеи1чя двигателя 1 и с по- М( масп1таб 1рующегс задающего бло- к;; 5 обеспеч1П)ают скорость вращения
,v,ais;c
а с помошыо фазируклдего блока о - г-мнимум показаний иу::ь -инднкатора 11., Повто- этих сперапдй осутцествляют компеиса; ,ию с:кнфазиой и квадратурной с ос т а вля юпщ х ос т ат оч н ог о и апр яж е ния гахогенераторЕ. 2, фазирование и масш- тйбировамие входнгого сигнала и сигнала тахогенераторй 2 с заданной точностью. При входном напряжении, рав- ;ом кулю, проверяют отсутствие дрейфа нуля привода,.
Таким образом, б.пагодаря совместной реализап,ии операп тй фазирования и м.лсштабирозаьия привода обеспечи- зается :товь;1иение точности и быстродействия настрс йки ;7.ривода,
Q о р м у л а и 3 о б р е т е н и я
31
ром после устранения автоколебаний разгоняют привод с помощью регулятора до заданного значения скорости в йрямом направлении вращения, измеряют действительное значение, устра- няют ошибку по скорости изменением выходного напряжения масштабирующего задающего блока, реверсируют привод и разгоняют его до заданного значения скорости в обратном направ- лении вращения, измеряют действительное значение скорости привода, при обратном направлении вращения уменьшают вдвое ошибку по скорости без изменения ее знака путем изменения амплитуды выходного напряжения масштабирующего компенсирующего блока, при прямом направлении вращения привода измеряют величину напряжения на входе усилителя привода и с помощью фазирующего задающего блока фазируют привод уменьшения этого напряжения до минимально возможной величины, при обратном направлении вращения привода измеряют величину напряже- НИН на входе усилителя привода, снижают ее двое без изменения знака путем изменения выходного напряжения
Редактор А.Шандор Заказ 1223/55
Составитель В.Алешечкин
Техред М.Ходанич Корректор М.Шароши
Тираж 661Подписное
ВНИИ11И Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
124
фазирующего компенсирующего блока, операцию реверсирования привода пов- .торяют до тех пор, пока не будет получена требуемая точность Настройки привода по скорости и по фазе, отличающ.ийся тем, что, с целью повьшзения точности и быстродействия, после устранения ошибки по скорости в прямом направлении вращения привода изменением выходного напряжения масштабирующего задающего блока осуществляют измерения величины напряжения на входе усилителя привода, фазирование привода, реверсирование привода и его разгон до заданного значения скорости, указанные измерения действительного значения скорости привода, уменьшение вдвое ошибки по скорости без изменения ее знака измерением величины напряжения на входе усилителя привода, снижение его вдвое без изменения знака, причем повторное реверсирование привода, операции при прямом и обратном направлениях вращения привода повторяют до тех пор, пока не будет получена требуемая точность настройки привода по скорости и фазе.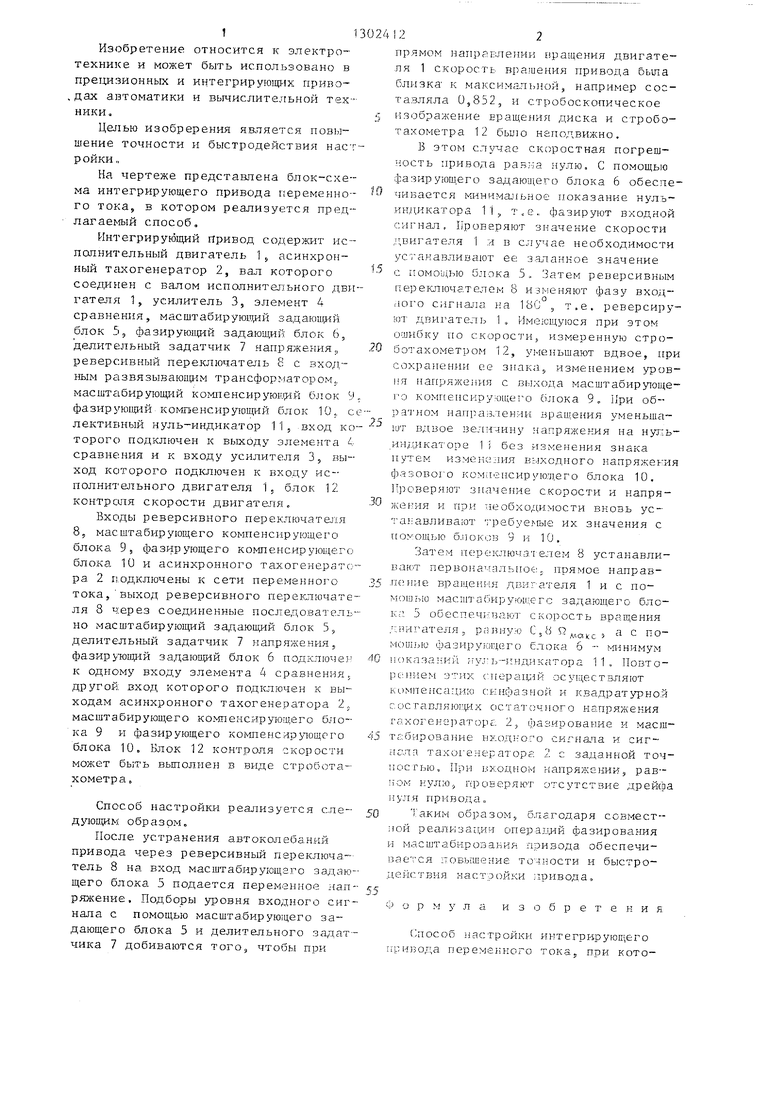
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ настройки интегрирующего привода переменного тока с каскадно соединенными тахогенераторами | 1985 |
|
SU1453363A1 |
| Способ настройки интегрирующегопРиВОдА пЕРЕМЕННОгО TOKA | 1978 |
|
SU800972A1 |
| Интегрирующий привод переменного тока | 1985 |
|
SU1272306A1 |
| Следящая система | 1986 |
|
SU1401436A2 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| Интегрирующий привод | 1975 |
|
SU661503A1 |
| Устройство для измерения характеристик асинхронного тахогенератора | 1980 |
|
SU892365A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Устройство для импульсного регулиро-ВАНия фАзОВОгО пОлОжЕНия POTOPA СиН-ХРОННОгО элЕКТРОдВигАТЕля | 1979 |
|
SU817960A1 |
Способ настройки интегрирующего привода (П) перем. тока относится к области электротехники и может быть использован в системах автоматики и вычислит, техники. Согласно данному способу операции масштабирования и фазирования П проводятся последовательно дпя каждого направления его вращения. Причем при прямом направлении вращение устанавливается минимальное рассогласование П по скорости и фазе, а при обратном направлении вращения имеющаяся ошибка по скорости и фазе снижается вдвое без изменения ее знака. Предложенный способ благодаря совмещению указанных операций, выполняемых в известных П раздельно, позволяет повысить быстродействие и точность настройки П. Устройство для реализации способа содержит исполнительный двигатель 1, тахогенератор 2, усилитель 3, элемент 4 сравнения, масштабный задающий блок 5, фазирующий задающий блок 6, усилительный задатчик 7 напряжений, реверсивный переключатель 8, масштабный компенсирующий блок 9, фазирующий компенсирующий блок 10, селективный нуль-индикатор 11 и стробота- хометр 12. 1 ил. (Л Сеть со ю N
| Фабрикант Е.А | |||
| и др | |||
| Интегрирую- щий привод | |||
| М.: Энергия, 1980, с | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
