(54) ИНТЕГРАТОР АЗИМУТНЫХ ИМПУЛЬСОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегратор азимутных импульсов | 1977 |
|
SU732907A1 |
| Интегратор азимутных импульсов | 1977 |
|
SU736123A2 |
| Интегратор импульсов | 1978 |
|
SU750508A1 |
| Интегратор азимутных импульсов | 1975 |
|
SU572795A1 |
| Интегратор азимутных импульсов | 1976 |
|
SU646348A2 |
| Преобразователь угла поворота вала в код | 1976 |
|
SU661589A1 |
| Интегратор импульсов | 1977 |
|
SU714414A1 |
| ИНТЕГРАТОР АЗИМУТНЫХ И/\\ПУЛЬСОВ | 1972 |
|
SU424164A1 |
| Устройство для интегрирования частотно-импульсных сигналов | 1984 |
|
SU1160444A1 |
| Следящий умножитель частоты | 1977 |
|
SU732866A1 |
. -. . . .
Изобретение отвоситсй к обпасти aBt6-
матики и вычислительной технике, может
..--...
быть использовано для воспроизведений значения угпа враШения инерциониьбс объектов или для воспроизведения друггос плавно изменяюшихся процессов, информация о которых передается методом приращений, в системах с цифровой обработ кой информации.
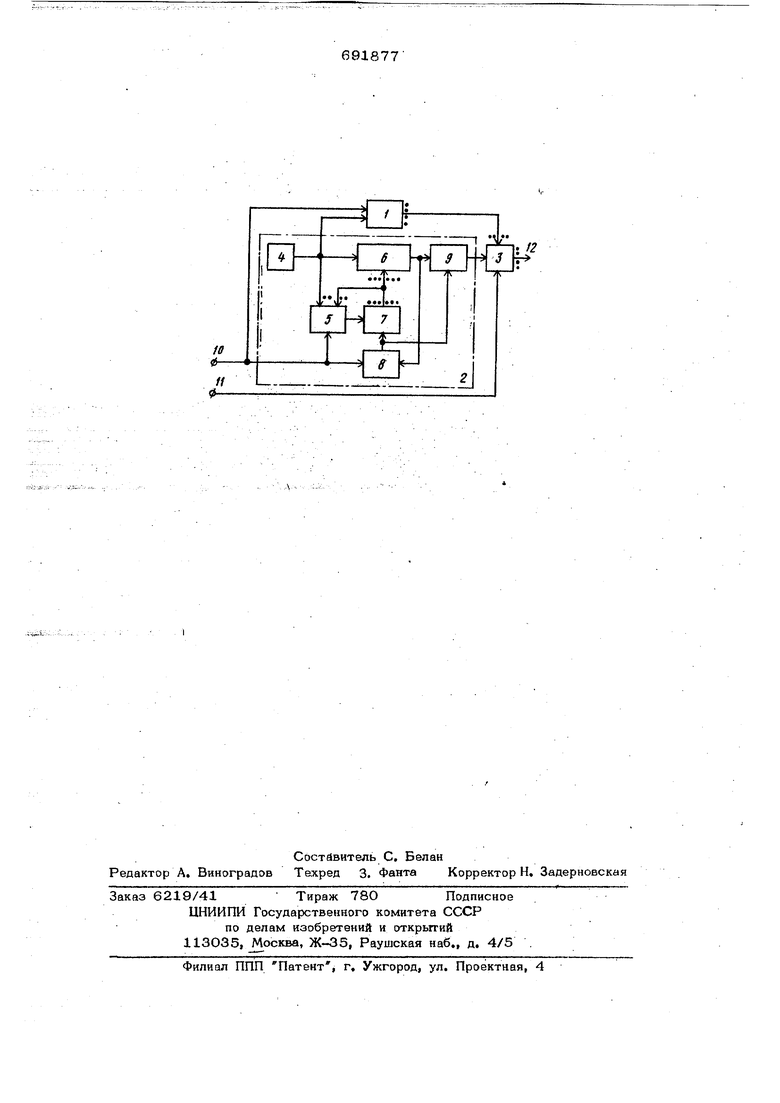
По основному авт. св. М 572795 известен интегратор, содержащий управляемый делитель частоты, один из входов которого соединен с генератором имиульсов, а другой - подключен к выходу блока управления. Первый вход блока управления соединен с выходом блока коррекции, состоящего из счетчика, логического элемента И и триггера, причем счетный вход счетчика соединен с выходом логического элемента И, управляющий вход с шиной входного сигнала, а суммирующий вход с выходом блока управления. Первый аход логического элемента И подключен к выходу генератора импульсов, а второй вход
через триггер соединен с шиной азимут- ньк импульсов. Второй вход триггера подключен к выкоду счетчика, а выход логического элемента И является выходом блоки коррекции. Второй вход блока управления соединен с выходом измерителя рассотласовайия, дйа входа которого подключены к шине азимутных импульсов и к выходу управл аемого делителя частоты соответственно, а выход соединен также с входом компенсатора фазовой ошибки. Два других входа компенсатора подключены к выходу генератора импульсов и управляемого делителя частоты соответственно, а выход соединен с входом счетчика, другой вход которого подключен к шине юстировочного импульса. В интег раторе осуществляется умножение аходных азимутных импульсов на целое tianeред заданное число таким образом, что на выходе, управляемого делителя частоты формируются импульсы повьииенной частоты, равномерно расположенные внутри дискрета входных азимутных импуль3Gсов. Импульсы поБышен шй частоты подсчитываются счетчиком, выходные разряды которого образуют параллельный цифро вой код. При изменении периода азимутньк импульсов изменяется количество им пульсов повышенной частоты с выхода управляемого делителя частоты, что приводит к динамической ошибке внутри дискрета входных импульсов. Требуемое в этом случае изменение частоты импуль сс5в повышенной частоты осуществляется изменением коэффициента деления (t) управляемого делителя частоты через блок управления и блок коррекции по результатам подсчета количества импульсов повышенной частоты .за период между соседними, входными азимутными импульсами в измерителе рассогласования и с учетом частоты азимутных импульсов таким образом что - - величина постоянная. Интегратор азимутных импуль сов с таким управлением xoijomo отслеживает изменение ча СТОты азимутнйх импульсов в широком диапйзрне 4iaeToti с сохранением точности воспроизведения угла. Компенсатор фазовой ошибки усграняет ошибку по фазе добавлением или вычитанйеь из выходной последовательности импульсов повышенной частоты требуемого количества импульсов. Значение уг ла поворота в двойчнйм паралпельном коде получается интегрирбванием импульсов повышенной 4actoTbi счетчиком, сбрасью емым в исходное состойняё одйй раз за оборот юстировочным импульсом. Однако в этом устройстве невозможно учитьшать направления изменения инерционного .процесса. Цель изобретения - расширение диапазона изменения входных сигналив. Это достигается тем, что в устройств введен анализатор частоты, первый вход которого подключён к входу азимутных импульсов, интегратора, второй вход соед нен d BbtxoflOM генератора импульсов, а выход подключен к третьему входу сче чика. На чертеже представлена структурная схема интегратора азимутных импульсов. Интегратор содержит анализатор 1 частоты, следящий умножитель 2 частоты, реверсивный счетчик 3, генератор импульсов 4, блок коррекции 5, управляемый делитель 6 частоты, блок управления 7, измеритель рассогласования 8, компенсатор фазовой ошибки 9, вход азимутных импульсов Ю интегратора. 7 в.ход юстировочршк импульсо } 11 и выход устройства 12, Устройство работает следуЮ щим образом. При передаче угла вращения (или информации о готавно изменяющемся процессе) по каналу связи на в.ход 1О передается последовательность азимутных импульсов, следующих через равные угловые интервалы, и на в.ход 11 - юстировочный импульс. Интегратор осуществляет экстраполяцию точного углового положения вала на интервале азимутных импульсов, используя инерционные свойства вра.щающегося объекта. Азимутные импульсы умножаются на целое наперед заданное число таким образом, что на выходе управляемого делителя 6 частоты формируются импульсы повышенной частоты, равномерно расположенные внутри дискрета азимутных импульсов. Импульсы повышенной частоты через компенсатор фазовой ошибки 9 подсчитьшаются реверсив- HbiM счетчиком 3, выходные разряды которого образуют параллельный цифровой . код угла поворота. При изменении периода азимутных импульсов изменяется количество импульсов повышенной частоты с выхода управляемого делителя 6 частоты, что приводит к динамической ошибке внутри дискрета входных импульсов. Изменение частоты импульсов повышенной частоты осуществляетсй изменением коэффициента деления а управляемого делителя 6 частоты через блок управления 7 и блок коррёций 5 по результатам йодсчета количества импульсов повышенной частоты за период между соседними выходными азимутными импульсами в измерителе рассогласования 8, с учетом частоты азимутных импульСоэ. Это обеспечивает сохранение точ:ности воспроизведения угла в широком диапазоне входных частот взймутных импульсов. Импульсы повьцденной частоты интегрируются реверсивным счетчиком 3, запускающимся каждым юстировочным импульсом. Инерционные свойства вращающегося объекта позволяют повьюить разрешаю.щую способность интегратора путем умножения частоты азимутных импульсов. Контур, состоящий из генератора импульсов 4, управляемого делителя 6 частоты, измерителя рассогласования 8, бЛок управления 7, блока коррекции 5, компенсатора фазовой ошибки 9 осу.ществляет слежение з& частотой входных азимутных импульсов и ее кратное умножение (выполняет функции следягцего умножителя 2 часто-Мэ). Изменение частоты импульсов повышенной частоты достигается изменен ем коэффициента деления (а) управляемо го делителя 6 частоты таким образом, что соотношение -yJ - постоянно. Для достижени5гданной пропорции блок управления 7 и блок коррекции 5 изменяют До пропорционально о . Поэтому следящий умножитель 2 частоты отслеживает изменение частоты азимутных импульсов в широком диапазоне частот с сохранением точности воспроизведения угла. При низкой частоте азимутных импульсов управляющее воздействие изменяется на большую величину, что позволяет более эффективно компенсировать ошибку по частоте. При высокой частоте азимутных импульсов управляющее воздействие изменяется на меньшую величину, чем достигается меньшая динамическая ошибка Для устранения ошибки по фазе, обусловленной дискретностью изменения коэффициента деления (о, ) управляемого делителя 6 частоты используется фазовая коррекция с помощью компенсйтора фазовой ошибки 9, Компенсация фазовой погрешности осужествляетсй добавлением или вычитанием из выходной йоспедоватедь,ности импульсов повышейной 4adTOTbi требуемого количества импульйоб. Значение угла поворота в двоичном парал лельном коде, соответствующее угловому положению антенны РЛС, получается путем интегрирования импульсов Повышенной частоты реверсивным счетчиком 3. Установка начала отсчета проиЗВбдится каждым юстировочным импульсом по входу 11. При изменении напра влеййя вращения антенны РЛС пройс одй уменьшение частоты азимутных имйульсов на входе 1О до нулевого значения и Э&Тёмвозрастание до определенной частоты, соответствующей скорости вращения, но уже в противоположную сторону, что позволяет автоматически следить за направлением антенны РЛС путем анализа частоты азимутных импульсов. При секторном качании антенны РЛС в момент нахождёния в двух крайних положениях частота азимутных импульсов также уменьшается до нулевого значения. Кроме того, су67 ществует ряд инерционных процессов, изменения которых происходят циклически, т. е, и в этих случаях частота импульсов прирЕццений проходит нулевое значение. Анализ частоты азимутных импульсов осуществляется анализатором 1 частоты, который может быть реализован иа двоичном счетчике и дешифраторе. Частота азимутных импульсов измеряется заполнением дискрета азимутных импульсов импульсами высокой частоты с выхода генератора импульсов 4. Дешифратор реагиру- . ет на количество импульсов высокой час- . тоты в интервале между соседними азимутными импульсами и выдает сигнал на реверсивный Счетчик 3 при прохождении частотой азимутных импульсов (при изменений направления вращения антенны РЛС). Сигнал с выхода анализатора 1 частоты переключает счетчик. на сложение или вычитание, в зависимости от начальноЙ установки, введенной в анализатор 1 частоты. Начальная установка необходима для ввода систем в синхронизм с вращением антенны РЛС. Предложенный интегратор азимутных : импульсов легйо реализуется на элементах дискретной техники, обладает высокой точностью воспроизведения угла вратаёния инерционных объектов с учетом изменения их направления вращения за счет использования абализатора частйты и соответствующих связей. Кроме того, oti позволяет преобразовьшать широкий класс инердиойньгх процессов, информация & которых передается методом приращений, с учето1 1 йаправления изменеНИН Процесса. Формула изобретения Интегратор азимутньгх импульсов по авт. св. № 572795, отличающийся тем, что, с целью расширения диапазона изменения входных сигнаглов, в него введен анализатор частоты, первый вход которого подключен к входу азимутных импульсов интегратора, второй кход соединен с выходом генератора импульсов, а выход подключен к третьему входу счетчика.
