Изобретение относится к области автоматики и вычисяительной техники и может бить йспояьЗоваао дли восдро- юведений значенн угла врашення вкердионного объекта вли для воспровзвёдения других плавно изменяющихся процессов, информация о которых вередйетсй методом приращений.
По авт. св. № 424264 известен интегратор азимутных йМпуЛьсов, со- Т держащий счетчик и управляемый делитель частоты, одив из входов которого соединен с -генератором имйулЬсов, а другой через блок управлений пошслк 7 чей к выходу измерителя рассогйасова йия, выход управляемого делителя час тоты соединен со входом измерителя рассогласования it компенсатора фазо вой ошибки, два других входа которого соединены с выходами генератора импульсов и измерителя рассо1Гйаооваггая, а выход подключен ко входу счетчика ll
В известном интеграторе осуществл;аотся умножение входных азимутных
импульсов на целое, наперед заданноэ число раз таким образом, что на выходе управляемого делйШтгя частоты формируются импульсы rtoEbiuteiiHoS частоты, равномерно расположе &1е внутри дискрета входных аЗймуТных импульсов. Импульсы повьиценчой частоты подсчитыва ютсй счетчиком, выходные разряды которого образуют параллельный цифрово й код. При измененни периода аакмут штк импульсов количество импульсов noBbi щеанЪй частоты поддерживаетсяпостояпньтм благодаря йзмеяению коэффициента дел&ния управляемого делителя частоты через блок управления по рейультатам подсчета кол чества импульсов п;овышен ной частоты за период между соседними взсодшдми азимутными .и лпульсами в измерителе рабйбгласоваййя. ; : Недостатком этого интегратора является невозможность .вос1Гфоизвейелия угла при передаче процесса вращения азимутными им11ульсамй с датчиков угла, связатпзых с вращающимся валом
через понижающий (как правило) редуктор, Или имеющими частоту в целое число раз MfeHbme частси;ъ1 плавно ме ншошегося процесса.
Известный интегратор не может рабЪтать при выше указанных условиях, что снижает возможности его применения в системах с редукаией скорости вращения инерционного объекта (нли изменения плавного продессй).
Целью изобретения является повышение точности и расши{ ение области применения .
Поставленная пель достигается тем что в интегратор введены блок умножен кия н формирователь юстировочных, имлульсрв, первые входы которых соединены с шиной азимутнь1Х импульсов, вторые входы связаны с шиной и признака умножения, третий бход блока умножения подключен ко второму выходу измерителя рассогласования, второй вход которого соединен с выходом блока умножения, третий вход формирователя котировочных импульсов подключен к шине юстировочных импульсов, а его выход связан со вторым входом счётчика.
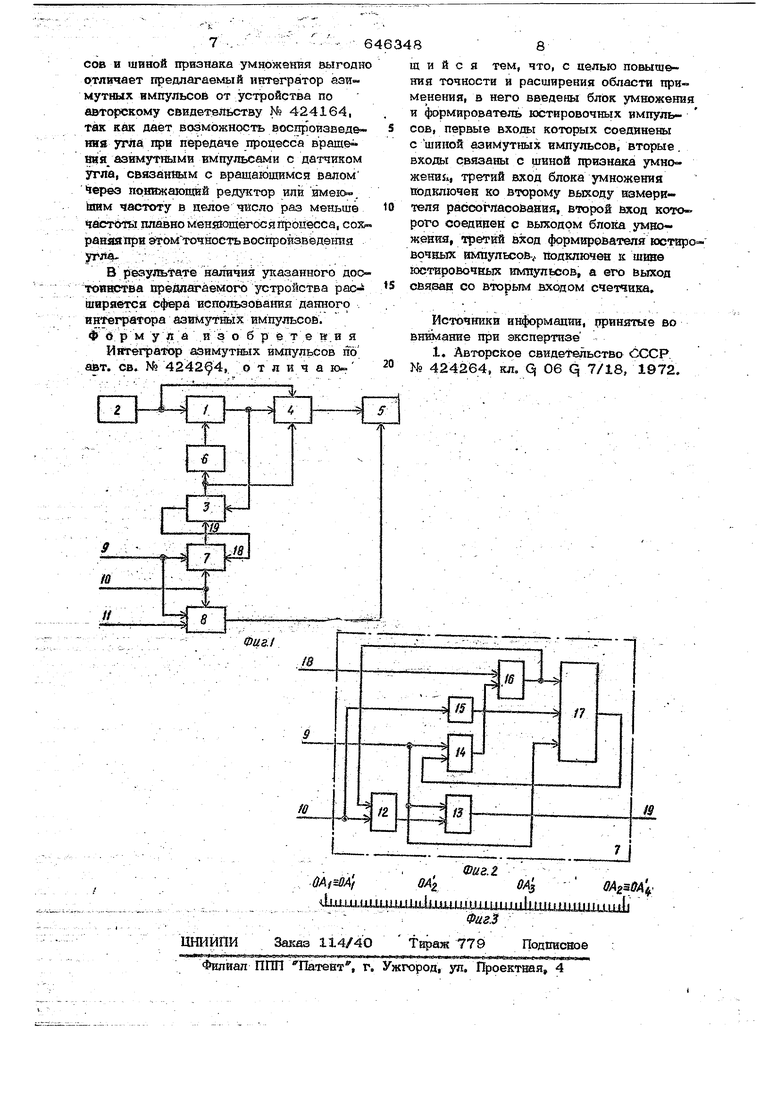
Изобретение поясняется фигурами. На фиг. 1 приведена схема интегратора азимутных импульсов, на фиг. 2 - структурная схема блока умножения, а на фиг. 3 - диаграмма умножения частоты азимутных импульсов.
Интегратор азимутных импульсов (фиг. l) содержит управляемый частоты 1, генератор импульсов 2, измритель рассогласования 3, компенсатор фазовой ошибки 4, счетчик 5, блок упраления 6, блок умножения 7, формирователь йстировочных импульсов 8, шину азимутных импульсов 9, шину признака умножения 10 и шину юстировочных импульсов 11.
На фиг. 2 обозначены: элемент И 12 элемент ИЛИ 13, триггер 14, устройство ввода 15, элемент И 16, счетчик 17 вход 18 экстраполированных азимутных отметок и выход 19 йзимутных импулх сов с частотой следования, равной частоте изменения.процесса.
На фиг. 3 обозначены: ОА а , ОА я -. -I)
азимутные импульсы, ОА t - ОА 4.
азимутные отметки, частота которых равна утроенной частоте входных импульсов.
При передаче угла ьрашения методом щ)иратцений по каналу связи передается
последовательность азимутных отметок, следующих через равные угловые интервалы, и юстировочный импульс. Интегратор осуществляет экстраполяцию точного углового положения вала на интервале азимутных отметок, используя инерционные свойства вращающегося объекта. Признак умножения, зависящий от типа сопрягаемого изделия, подаваемый по шине Д О, на вход формирователя гастировочных импульсов, управляет количеством юстироЬочных импульсов, поступающих на второй вход счетчика 5. Формирователь 8 выдает, кромо основных юстировочных импульсов, поступающих по шине 11, экстраполированные юстировочные импульсы ;На установку и сброс счетчика 5 таким )бразом, что интервал. между двумя соседними экстраполированными юстировочными импульсами равен полному обороту вращающегося объекта. Данный процесс легко реализуется на двоичном счетчике, путем, подсчета азимутных отметок. В зависимости от типа сопрягаемого изделия изменяется число на входе счетчика 5. Так, например, если скорость вращения объекта возрастет в три раза: формирователь 8 выработает два дополнительных экстраполированных юстировочных импульса на установку и сброс счетчика 5, Дополнительное умножение частоты азимут1&1Х импульсов в зависимости от сопрягаемого изделия происходит в целое наперед заданное чиопо раз, зависящее только от типа сопрягаемого объекта,, путем формирования экстраполированных азимутных отметок, блоком умножения 7. Определенные экстраполированные азимутные отметки играют роль основных в процессе формирования импульсов повышенной частоты на выходе управляемого делителя час1чэты 1,
Блок умножения 7 работает следув щим образом.
На вход 18 с второго выхода измерителя 3 рассогласования поступают экстрполированные азимутные отметки, полученные в результате подсчета импульсов повышенной частоты с выхода управляемого делителя частоты 1 счетчиком измерители рассогласования 3« Экстраполированные азимутные отметки с второ. го выхода измерителя рассогласования 3 подсчит 1ваются счетчиком 17. Появление переноса счетчика 17 зависит от признак-а умножения, -подаваэмого на шийу признака умножения 10. В зависи« мости от последнего устройство ввода 15 у1травляет вводом числа в счетчик 1 изменяя -крэффициент пересчета. Управл ние сбросом и вводом счетчика 17 осуществляется азимутными отметками, по тупающими по шине азимутных отметок 9. Импульс переноса счетчика 17 вы8ы Ьт срабатывание триггера 14, который переходит в нулевое состояние, запр& Щая прохождение экстраполированных азимутных отметок на счетный вход счетчика 17. При единичном состоянии триггера 14 элемент И 16 йропускает экстраполированную азимутную отметку на вход счетчика 17 и на элемент И 1 которая через элемент ИЛИ Хз посту;пает на выхрд19 блока умножения 7 в качестве основной азимутной отметки. Триггер 1i устанавливается в единичное состояние очередной азимутной отметкой по шине 9. Разрешающий потенциал на выходе триггера 14 поддерживается на время, необходимое для прохождения определенного количества экстраполированных азимутнь1Х отметок в зависимости от признака умножения. Например, при вращении, объекта со скоростью в три раза большей, чем скорость датчика угла поворота, первая азимутная отметка вызыва ет срабатывание триггера 14 и счетчика 17, Импульсы повышенной частоты подсчитываются счетчиком измерителя рассогласования 3. При определенном количестве импульсов повышенной частоты формируется экстраполированная азимутная отметка О А g которая не играет роль основной и не изменяет сигнала рассогласования на блоке управ ления 6. Вторая экстраполированная азимутная отметка ОА , формируемая в результате подсчета импульсов повышенной частоты, уже играет роль основ ной азимутной отметки в дальнейшем пр нессе умножения частоты. Количество неосновных экстраполированных азимутных отметок (к&к ОА ) зависит от типа conpitraeMoro изделия. Дальнейший процесс отслеживания частоты азимутных отметок происходит по подсчету количества импульсов повышенной частоть в интервале между ОА и ОА л л , Б ТО время как все импульсы повышенной частоты подсчитываются счетчиком 5. Замкнутый контур, состоя щий из генератора импульсов 2, управл щего делителя частоты 1, измерителя рассогласова1гия 3, блока управления 6 8б осуществляет слежение за частотой азимутных «л пульсов и ее кратное умножетше. Изменение частоты импульсов повышенной частоты достигается изменением коэффициента деления управляем(-го делителя частоты 1. Для устране1шя ошибки по фазе обусловленной дискретностью изменения коэффициента деления о управляемого делителя частоты 1, в интеграторе применен компе юатор фазовой ошибки 4, осуществляющий сброс ршпбки добавлением или вычитанием из Ьыходной последовательности импульсов ювышенной частоты требуемого количества импульсов. Значение угла поворота в двоичном параллельном коде получается путем интегрирования (суммирования) импульсов повышенной частоты счетчиком 5. Таким образом, в процессе работы интегратора экстраполированные азимутные отметки (например, ОА i OAg ) поступают на измеритель рассогласования 3, но не изменяют в дальнейшем коэффициента деления управляемого делителя частоты 1, так как количество импульсов повышенной частоты между отметками равно заданному. Изменение коэффициента деления управляемого делителя частотъ 1 и коррекция фазовой ошибки производятся тгосле прихода основной .{как ОА j ОА j , ОА g ОАЛ ) азимутной отметки по результатам подсчета Импульсов повышентгой частоты в интервале между последней экстраполированной (OAj ) и пришед- / шей (ОА 2 г ОА4 ) азимутной отметками. .Такой способформирования экстраполированных азимутных отметок позволяет осуществить требуемую редукцию в воспроизведении угла вращения объекта. Установка начала отсчета угла производится сбросом счетчика 5 в исходное состояние юстировочными импульсами с формирователя юстировош ых импульсов 8, который может быть реализован на счетчике с устройством ввода числа в зависимости от типа сопрягаемого изделия На счетный вход счетч жа формирователя юстировочных импульсов 8 поступают азимутные .импульсыпо шине 9. Сброс и ввод числа счетчика осуществляется юстировочными импульсами по шине 11. Предложенный блок умножения, формирователь юстировочных импульсов и их соединение с измерителем рассогласования, счетчиком, шиной азимутных импульсов, входом юстировочных импу.пь
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегратор азимутных импульсов | 1977 |
|
SU732907A1 |
| Интегратор азимутных импульсов | 1977 |
|
SU691877A2 |
| Интегратор азимутных импульсов | 1975 |
|
SU572795A1 |
| Интегратор азимутных импульсов | 1977 |
|
SU736123A2 |
| Преобразователь угла поворота вала в код | 1976 |
|
SU661589A1 |
| Интегратор импульсов | 1978 |
|
SU750508A1 |
| Интегратор импульсов | 1977 |
|
SU714414A1 |
| Устройство для интегрирования частотно-импульсных сигналов | 1984 |
|
SU1160444A1 |
| ИНТЕГРАТОР АЗИМУТНЫХ И/\\ПУЛЬСОВ | 1972 |
|
SU424164A1 |
| Следящий умножитель частоты | 1977 |
|
SU732866A1 |
