I
Изобретение относится .к автоматике и вычислительной тахникэ, и может быть использовано для воспроизведения значения угла вращения инерционного объекта или для воспроизведения других плавно изменяющихся процессов, информация о которых передается методом приращений, в системах с цифровой обработкой информации,
В основном изобретении по авт,св, № 572795 описан иш-егратор азимутных импульсов, содержащий управляеМ1г1й делитель частоты, один из аходов которого соединен с генератором импульсов, а другой подключен к выходу блока управления, первый вход которого соединен с выходом блока коррекщяи, второй вход блока управления соединен с выходом измерителя рассогласования, два входа которого подключены к шине азимутных импульсов и выходу управляемого делителя частоты соответственно, а выход соединен также с входом компенсатора фазовой ошибки, два других входа которого подключены к выходу генератора импульсов н управляемого делителя частоты соответственно, а выход соединен с входом счетчика, другой вход которого подключен к итне юстнровочного импульса, входь блока коррекции подключены к шине азимутных импульсов, выходу блока управления и генератора импульсов соответственно C.
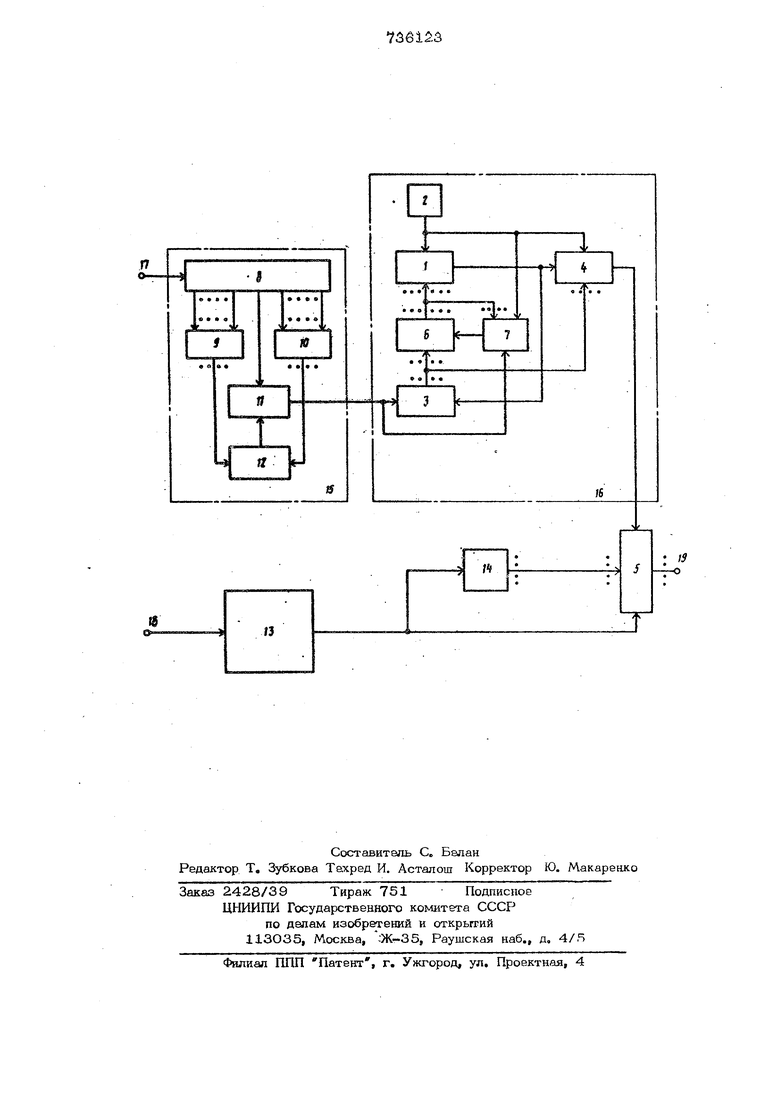
Икгегратор азимутных импульсов с таким управлением хорошо отслеживает , изменение частоты азимутных импульсов в широком диапазоне частот с сохранением точности воспроизведения угла. Компенсатор фазовой ошибки устраняет ошибку по фазе добавлением или вычит нием из входной последовательности и пудьсов повышенной частоты требуемого количества импульсов. Значение угла поворота в двоичном параллельном коде получается интегрированием импульсов повышенной частоты счетчиком, сбрасььваемым в исходное состояние один раз за оборот юстировочным импульсом. Недостатком этого интеграт.ора является недостаточная точность воспроизве-ч дения угла вращения, обусловленная ошиб кой фиксации центра азимутного импуль са в измерителе рассогласования, а также юстировки вследствие неоднозначности сбрасывания счетчика юстировочным импульсом из-за нестабильности амплитуды. Причем первая сост-авляющая оши ки вносится каждым азимутным импульсом, а ошибка юстировки вносится один раз за оборот или цикл изменения плавно го процесса. Ошибки фиксации временных положений импульсов обусловлены в основном нестабильностью амплитуд азимутных и юстировочных импульсов, ограниченностью полосы пропускания линий связи, по которым передаются aзи iyтныe и юстировочный импульсы, а также наличием искажений в линиях связи, вызьшае мьк различными шумами. Цель изобретения - повьшение точноети воспроизведения инерционных процессов. Поставленная цель достигается тем, что в известный интегратор введены два регенератора импульсов и блок ввода корректирующего кода, аход которого соединен с выходом первого регенератора импульсов, подключенным ко второму входу реверсивного счетчика, третий вход которого подключен к выходу устройства ввода, выход второго регенерат тора импульсов подключен ко входу следящего умножителя частоты, а входы регенераторов импульсов являются соот ветственно ккодами юстировочных и ази мутных импульсов. На чертеже приведена структурная схема предлагаемого интегратора. Предлагаемый интегратор содержит управляемый делитель частоты 1, генератор импульсов 2, измеритель 3 рассогласования, компенсатор 4 фазовой ошиб ки, реверсивный счетчик 5, блок управ ления 6, блок коррекции 7, линию задержки 8, сумматоры 9 и 10, ус1фойство совпадения 11, схему сравненк1я 12, первый регенератор 13 импульсов, оток 14 ввода корректир тощего кода, второй регенератор 15 икшульсов, следящий умножитель 16 частоты, вход азим гтных импульсов 17, вход юстировочных импул сов 18, выход интегратора 19, Выход следяшего умножителя 16 частоты соединен с первым входом реверсив ного счетчика 5, вход блока ввода 14 соединен с выходом первого регенератора 13 импульсов, а выход - со .вторыми входами реверсивного счетчика 5, вьосод второго регенератора 15 импульсов подключен к входу следящего умнонсителя 16 частоты, а аходы регенераторов импульсов ЯВЛ.ЯЮТСЯ соответственно входами юстировочных и азимутных им пульсов, выход первого регенератора 13 импульсов подключен ко входу реверсив- ного счетчика 5. Регенераторы импульсов содержат линию 8 задержки, первый 9 и второй Ю сумматоры, устройство 11 совпадения и схему 12 сравнения, причем вход линии 8 задержки является входом регенераторов импульсов, первая и вторая группы отводов линии 8 задержки соединены с первым 9 и вторым 10 сумматором соответственно, а центральный отвод подключен к первому входу устройства 11 совпадения, второй вход которого соединен с выходом устройства 12 сравнения, два входа котороГО подключены к выходам первого 9 и второго 1О сумматоров соответственно, выход устройства 11 совпадения является выходом регенератора 15 импульсов. Интегратор азимутных импульсов работает следуюишм образом. При передаче угла врашения (инерционного процесса) методом приращений по каналу связи передается последовательность азимутных импульсов, следующих через равные угловые ИЕГгервалы, и юстировочный . Интегратор осуществляет экстраполяцию точного углового положения вала.на интервале азимутных импульсов, используя инерционные свойства вращающегося объекта. Азимутные импульсы умножаются на целое, наперед заданное число так, что на выходе управляемого дешителя 1 частот формируются импульсы повышенной частоты, равномерно расположенные внутри дискрета азимутных импульсов Импульсы повышенной частоть через компенсатор 4 фазовой ошибки подсчитьшаются реверсивным счетчиком 5, выходные разряды которого образуют параллельный двоичный код угла поворота объекта. При изменении периода азимутных импульсов изменяется колич8С :во импульсов повышенной частоты с выхода управляемого делителя 1 частоты, что прквокят к динамической ошибке внутри дискрета входных импульсов. Требуемое в этом случае изменение частоты импульсов повышенной частоты осуществляепгся изменением коэффициента деления управляемого делитопя 1 частоты через блок 6 управления и блок 7 коррекции по результатам не только подсчета количества импульсов повышенной частоты за период между соседними входными азимутныкш импульсами в измерителе 3 рассогласования, но и с учетом частоты азимутных импульсов. За счет такого управления сохраняется точность воспроизведения угла в широком диапазоне входных частот азимутных импульсов. Импульсы повышен ной частоты интегрируются реверсивным счетчиком 5, запускающимся каждым юстировочным импульсом с выхода первого регенератора 13 импульсов. Инерционные свойства вращающегося объекта (изменяющегося процесса) позво ляют повысить разрешающую способность интегратора путем умножения частоты азимутных импульсов. Замкнутый контур, состоящий из генератора 2 импульсов, управляемого делителя 1 частоты, измерителя 3 рассогласования, блока 6 управ ления и блока 7 коррекции осуществляет слежение за час1-отой азимутных импульсов и ее кратное умножение. Изменение частоты импульсов повыщенной частоты достигается изменением коэффициента деления (с) управляемого делителя 1 частоты таким образом, что - const. Для достижения данной пропорции блок 6 управления и блок 7 коррекции изменяют А а пропорционально ( . Поэтому данный замкнутый контур хорошо отслеживает изменение частоты азимутных импульсов в широком диапазоне частот с сохранением точности воспроизведения угла. При сравнительно низкой частоте ази мутных импульсов управляющее воз- действие изменяется на больщую величину, позволяющую более эффективно компе сировать ошибку по частоте. При высоко частоте азимутных импульсов управляющ воздействие изменяется на меньшую вели чину, чем достигается меньшая динамическая ошибка. Для устранения ошибки по фазе, обусловленной дискретностью изменения коэффициента деления су упра ляемого делителя 1 частоты, в иктеграгторе применен компенсатор 4 фазовой ошибки, осуществляющий сброс ошибки добавлением или вычитанием из выходной псх:ледовательности импульсов повыщенной чистоты требуемого количества импульсов. Ре:генератор импульсов работает следующим образоки Азимутный импульс поступает на вход 17 линии 8 задержки. Выборки акшлитуды азимутного импульса, проходяЕ.его по линии 8 задержки, поступают с первой и второй групп отводов на входь первого 9 и второго 10 сумматоров соответственно. Суммы выборок амплитуд с вььчодов сумматоров 9 и 10 поступают на входы схемы 12 сравнения. На схеме 12 сравнения осуществляется их непрерывное сргшнение. В момент равенства взвешенной суммы выборок значений огибающей азимутного импульса, снимаемой с выхода сумматора 9, сумме выборок значений огибающей азимутного импульса, с{шмаемой с выхода cyNaiaTOpa 1О, на выходе устройства 11 совпадения формируется , поступающей в качестве азимутного на вход следящего умножителя 16 частоты. Разрешающий потенциал для прохождения этого импульса формируется с&мим входным ази гутным импульсом, задержанным с целью выравнивания временных соотношений в лиьши 8 задержки Разрешающий потенциал снимается с центрального отвода линии 8 задержки. Регенератор 15 и myльcoв осуществляет как бы фиксацию центра тяжести азимутного импульса. Работа регенератора 13 импульсов при поступлении юстировочного импульса аналогична. Следует отметить, что любой метод фиксации центра тяжести азимутного импульса вносит дополнительную погрешность, обусловленную запаздьшгнием сформированного импульса отно- сительно истинного центра тяжести азимутного импульса. Но данная погрешность имеет систематический характер (практически постоянна для широкого . диапазона частот) и может быть соответственно компенсирована. Для компенсации данной погрешности используется блок 14 ввода корретирующего кода, осуществл$пощдй ввод корректирующего кода в реверсивный счетчик 5 в момент прихода каждого юстяровочного импульса. Вводить корректировку по каждому a3nNtyTHOMy импульсу нецелесообразно из-за систематического характера погрещности. Блок ввода корректирующего кода может быть легко реализован на обьпных логических элементах с изменяемой структурой. Последнее цалесообгразно при непостоянстве характера искажений в каналах связи. 77 При возможности априорной оценки 11скажвшй каналов связи возможна ЖЕЮТкая реализация как регенераторов импульсов, так и устройства ввода, В данном случае корректирующий код с выхода блока 14 однозначно определяет са истинным запаздыванием импульсов, н© сущих информацию об изменяемом процессе по отношению к самому процессу (например, врашению антенны радиопокационной станции), В данном случае /тоПерсия ошибки может быть снижена до номинальной. Предлагаемый интегратор азимутных импульсов обладает повьциенной точность аоспроизведения инерционного процесса (угла вращения вала), что достигается фиксацией азимутных, импульсов и юсти- ровочньрс импульсов по их центрам тяжести. Компенсация вносимого запаздывания реализуется введением корректирую- шего кода в реверсивный счетчик 5 каждым юстировочным импульсом с помощью блока 14. Кроме того, следует отметить, что при резко выраженной несимметричности азимутных и юсти ровочньк импульсов с выхода каналов связи возможна также фиксация их цент ра тяжести, ко при. использовании в каж дой из групп отводов линии 8 задержки разного количества отводов, В результате наличия указанных достоинств предл г мого интегратора расширяется сфера его использования и функциональные возможности. Проверка полученных выводов осуществлялась по результатам испытавий макета. Форм у л а изобретения Интегратор азимутных импульсов по авт,св, f9 572795, отличающийся тем, что с целью повьииения точности воспроизведения инерционного процесса, китегратор содержит два регенератора импульсов и блок ввода корректирующего кода, вход которого соединен с выходом первого регенератора импульсов, подключенным ко второму входу реверсивного счетчика, третий вход которого подключен к выходу устройства ввода, выход второго регенератора импульсов подключен ко входу следящего умножителя частоты, а входы регенераторов импульсов являются соответственно входами юстировочных и азимутных импульсов. Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР №572795, кл, G Об Q 7/18,1975,
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегратор азимутных импульсов | 1977 |
|
SU691877A2 |
| Интегратор азимутных импульсов | 1977 |
|
SU732907A1 |
| Интегратор азимутных импульсов | 1975 |
|
SU572795A1 |
| Интегратор импульсов | 1978 |
|
SU750508A1 |
| Интегратор азимутных импульсов | 1976 |
|
SU646348A2 |
| Преобразователь угла поворота вала в код | 1976 |
|
SU661589A1 |
| ИНТЕГРАТОР АЗИМУТНЫХ И/\\ПУЛЬСОВ | 1972 |
|
SU424164A1 |
| Интегратор импульсов | 1977 |
|
SU714414A1 |
| Устройство для интегрирования частотно-импульсных сигналов | 1984 |
|
SU1160444A1 |
| Следящий умножитель частоты | 1979 |
|
SU832556A1 |