(54)ПРОТИВОБДОКИРОВОЧНОЁ УСТРОЙСТВО ДЛЯ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА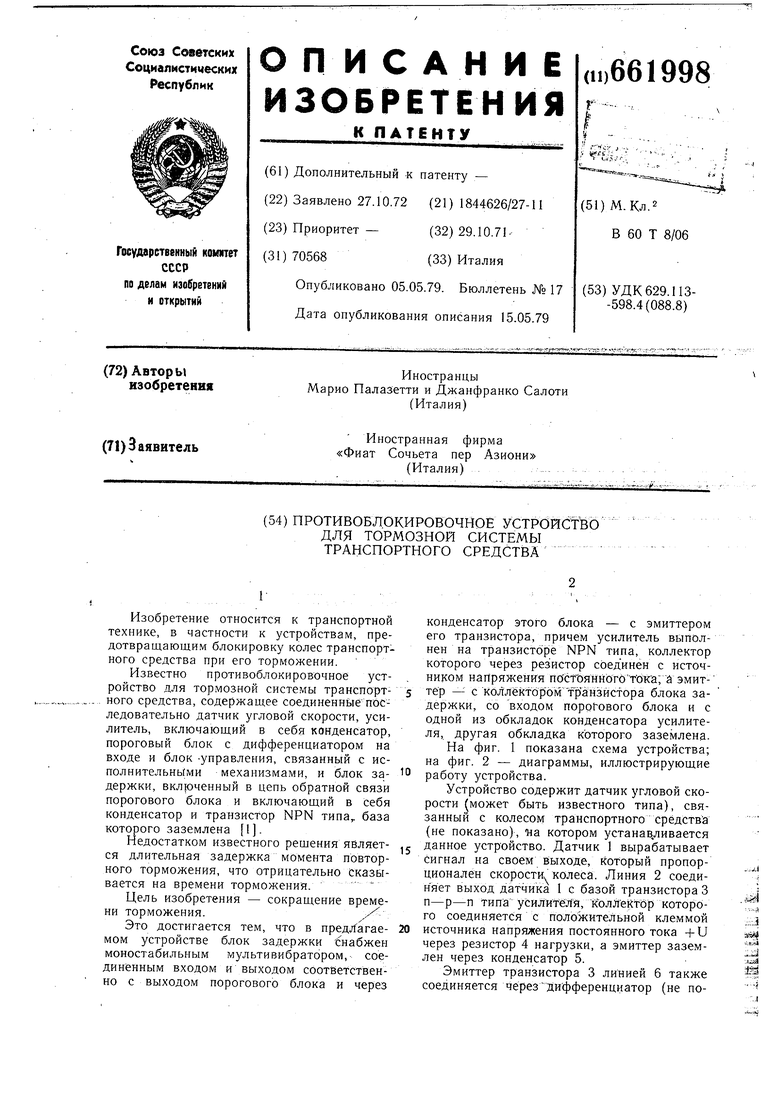
Изобретение относится к транспортной технике, в частности к устройствам, предотвращающим блокировку колес транспортного средства при его торможении.
Известно противоблокировочное устройство для торгиозной системы транспортного средства, содержащее соединенные последовательно датчик угловой скорости, усилитель, включающий в себя конденсатор, пороговый блок с дифференциатором на входе и блок -управления, связанный с исполнительньгми механизмами, и блок задержки, включенный в цепь обратной связи порогового блока и включающий в себя конденсатор и транзистор NPN типа, база которого заземлена 1.
Недостатком известного решения является длительная задержка момента повторного торможения, что отрицательно сказывается на времени торможения.
Цель изобретения - сокращение времени торможения.хЭто достигается тем, что в предЛ агаемом устройстве блок задержки снабжен моностабильным мультивибратором, соединенным входом и выходом соответственно с выходом порогового блока и через
конденсатор этого блока - с эмиттером его транзистора, причем усилитель выполнен на транзисторе NPN типа, коллектор которого через резистор соединен с источником напряжения посГояннЬготОка; а эмиттер -- с коЛлёктбром Транзйстора блока задержки, со входом порогового блока и с одной из обкладок конденсатора усилителя, другая обкладка которого заземленаНа фиг. 1 показана схема устройства; на фиг. 2 - диаграммы, иллюстрирующие работу устройства.
Устройство содержит датчик угловой скорости (может быть известного типа), связанный с колесом транспортного средства (не показано), на котором устанав.ливается данное устройство. Датчик 1 вырабатывает сигнал на своем выходе, который пропорционален скорости колеса. Линия 2 соединяет выход датчика 1 с базой транзистора 3 п-р-л типа усиЛиТёл я,колЛектбр которого соединяется с положительной клеммой источника напряжения постоянного тока -f U через резистор 4 нагрузки, а эмиттер заземлен через конденсатор 5.
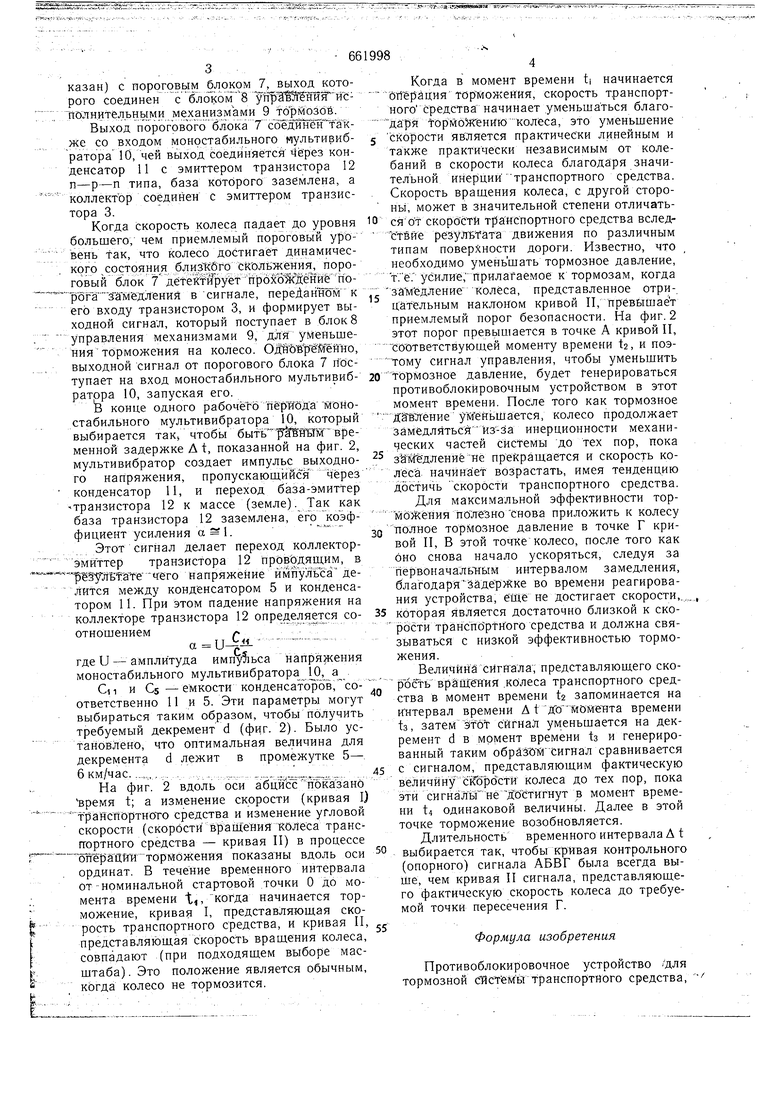
Эмиттер транзистора 3 линией 6 также соединяется черезДифференциатор (не показан) с пороговь1м блоком 7, выход которого соединен с блоком 8 Угтр115т ния йстголниТельньши механизмами 9 тормозов. Выход порогового блока Т сбёдинеТГтакже со входом моностабильного мультивибратора Ю, чей выход соединяется через конденсатор 11 с эмиттером транзистора 12 п-р-п типа, база которого заземлена, а коллектор соединен с эмиттером транзистора 3. Когда скорость колеса падает до уровня большего, чем приемлемый пороговый уровень Так, что колесо достигает динамического состояния близкбго скольжения, пороговый блок 7 дётект11рует прохоЯЧ1.ение по рога з амедлёний в сигнале, переДаннсГм к егб входу транзистором 3, и формирует выходной сигнал, который поступает в блок 8 управления механизмами 9, для уменьшенияторможения на колесо. ОдаЪжрёМёйно, выходной сигнал от порогового блока 7 п бступает на вход моностабильного мультивибратора 10, запуская его. В конце одного рабочего пёрТТода Моностабильного мультивибратора 10, который выбирается такГ чтобы быТь рЭВНЪГм врёменной задержке Д t, показанной на фиг. 2, мультивибратор создаёт импульс выходного напряжения, пропускающийся через конденсатор 11, и переход база-эмитТер -транзистора 12 к массе (земле). Так как база транзистора 12 заземлена, ёгр коэффициент усиления а 1. Этот сигнал делает переход коллекторэмиттер транзистора 12 проводящим, в результате Чего напряжение ймпул1ьса ДёЛиТся Между конденсатором 5 и конденсатором 11. При этом падение напряжения на коллекторе транзистора 12 определяется соотношениемгде и - амплитуда импу51ьса напряжения моностабильного мультивибратора 10, а Си и Cs-емкости конденсаторов,соответственно 11 и 5. Эти параметры могут выбираться таким образом, чтобы пблучить требуемый декремент d (фиг. 2). Было установлено, что оптимальная величина для декремента d лежит в промежутке 5- 6 км/час На фиг. 2 вдоль оси абцисс показанб время t; а изменение скорости (кривая I) Транспбртното средства и изменение угловой скорости (скорбстй вращения колеса трансп ортнбгб средства - кривая II) в процессе бп рацйи тормбженйя показаны вдоль оси ординат. В течение временного интервала от номинальной стартс1вой точки О до момента времени ti, когда начинается торможение, кривая I, представляющая скорость транспортного средства, и кривая И, представляющая скорость вращения колеса, совпадают (при подходящем выборе масщтаба). Этб пблбжение является обычным, кбгда колесо не тормозится. Когда в момент времени ti начинается опёрацияторможения, скорость транспортного средства начинает уменьшаться благодаря тор бжени:ю Колёса, это уменьшение скорости является практически линейным и также практически независимым от колебаний в скорости колеса благодаря значительной инерции транспортного средства. Скорость вращения колеса, с другой стороньГ, может в значительной степени отличатьсяот скорбстй тракспортного средства вслед ствйе результата движения по различным типам поверхности дороги. Известно, что необходимо уменьшать тормозное давление, т е усилие, прилагаемое к тормозам, когда замёдление колёса, представленное отрицательным наклоном кривой II, превышает приемлемый порог безопасности. На фиг. 2 этот порог превьш1ается в точке А кривой II, тгоътветствуюшей моменту времени iz, и поэтому сигнал управления, чтобы уменьшить тормозное давление, будет генерироваться противоблокйровочным устройством в этот момент времени. После того как тормозное д& в лёние уменьшается, колесо продолжает замедляться из-За инерционности мёхани еских частей сисТёМы до Тех пор, пока заЖ дЛёнйё не прекращается и скорость колеса начинает возрастать, имея тенденцию достичь скорости транспортного средства. Для максимальной эффективности тормбжёния полезноснова приложить к колесу полное тормозное давление в точке Г кривой II, В этой точке колесо, после того как оно снова начало ускоряться, следуя за первоначальттым интервалом замедления, благодаряЗадержке во времени реагирования устройства, ёщё Не достигает скорости,.,, кбторая является достаточно близкой к скороститранспбрТногб средства и должна связываться с низкой эффективностью торможения. Величина сйгнала, представляющего скоросТь вражетия .колеса транспортного средства в момент времени t2 запоминается на интервал времени А tДб мб1йе нта времени ts, затем ЗТбТ сйгнал уменьшается на декремент d в момент времени 1з и генерированный таким образбмсигнал сравнивается с сигналом, представляющим фактическую величину скбрбстй колеса до тех пор, пока эти сигнальГ недбстигнут в момент времени t4 одинаковой величины. Далее в этой тбчке торможение возобновляется. Длитёльность временного интервала Л t выбирается так, чтобы кривая контрольного (опорного) сигнала АБВГ была всегда выше, чем кривая П сигнала, представляющего фактическую скорость колеса до требуемой точки пересечения Г. Формула изобретения Противоблокировочное устройство /для тормозной с ЯсТёмЬГ ТрансПортнбго средства,
содержащее соединенные последовательно, датчик угловой скорости, усилитель, включающий в себя конденсатор, пороговый блок с дифферен 1иатором на входе и блок управления, связанный с исполнительными механизмами, и блок задержки, включенный в цепь обратной связи порогового блока и включающий в себя конденсатор и транзистор NPN типа, база которого- заземлена, отличающееся тем, что, с целью сокращения времени торможения, блок задержки снабжен моностабильным мультивибратором, соединенным входом и выходом соответственно с выходом порогового блока и
через конденсатор этого блока - с эмиттером его транзистора, причем усилитель выполнен на транзисторе NPN типа, коллектор которого через резистор соединен с источником напряжения постоянного тока, а эмиттер - с коллектором транзистора блока задержки, со входом порогового блока и с одной из обкладок конденсатора усилителя, другая обкладка которого заземлена.
Источники информации, принятые во внимание при экспертизе
faa./
t
tt ipui.Z
