Современ.ный лаг должен отве чать следующим основным условиям:
1)лаг должен работать на принципе измерения гидроди;намиче.ского давления;
2)лаг должен измерять непосредственно пройденное расстояние;
3)величина пройденного расстояния должна измеряться компенсационным методом, дающим наибольшую точность измерения;
4)показания пройденного расстояния должны сниматься с прибора в виде рабочего момента и показаний счетчика;
5)показания мгновенной скорости должны также определяться компенсационным методом;
6)показания приборов не должны изменяться при колебаниях напряжения сети, температуры и т. д.;
7)прибор должен отвечать прочим общим условиям, предъявляемым к лагам.
Основным из этих условий удовлетворяет лаг, в котором измерение скорости потока производится компенсациюнным методом при помощи электродвигателя, развивающего
скорость, соответствующую скорости потОКа, и создающего усилие, компенсирующее динамическое давление потока.
Предлагаемое устрсйство для измерения скорости истока или корабля, снабженное трубкой Пито и работающее по компенсационному способу, отличается тем, что для получения компенсирующего v,eкения скорости перемещения порщня, .воспринимающего динамическое и статическое давления среды, служит установленный на щтоке этого порщня центробежный регулятор, приводимый Бо вращение электродвигателем и правляющий следящей системой, регулирующей соироткБление в цепи приводногО двигателя, скорость которого является мерой измеряемой скорости потока (корабля).
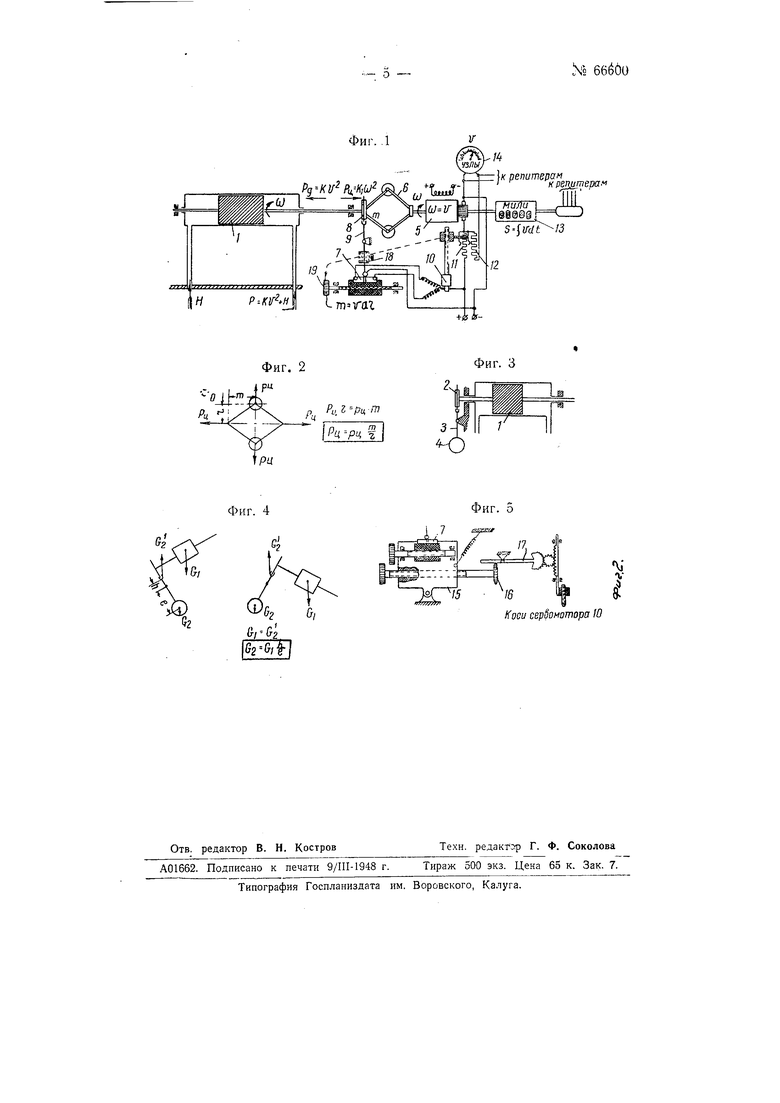
На чертеже фиг. 1 изображает схематически предлагаемое устройство, фиг. 3 и 5 - детали его, фиг. 2 и 4 - поясняют действие устройства и его деталей.
Как видно из фиг. 1. в предлагаемом усгройстве индикатором давления является порщень / (пли сильфон, меха). Бсспринпмающий
гидродинамическое давление потока по обычной схеме с трубкой
Пито.
Индикатор давления (поршень) под напором разности полного и статического давлений потока (ди.намического давления) отжи:мается
влево.
Поршень 1 связан с приводным электродвигателем 5 через компенсационный центробежный регулятор б.
При враш;енни шары центробежного регулятора б стремятся разойтись и при этом сдвигают вращаюш,ийся поршень 1 вправо. Следовательно, поршень оказывается под воздействием двух сил: силы дииамического напора потока и центробежной еилы шаров.
Следящее устройство 7 обеспечивает установление равновесия между этими силами изменением скорости врашения компенсационного двигателя 5. Если поршень 1 находится в равновесии при некотором динамическом напоре потока, центробежной силе шаров и соответствуюгцей угловой скорости вращения двигателя 5, то колесико следящего устройства 7 находится на изоляционном промежутке.
При увеличении динамического давления поршень 1 перемещается влево и при посредстве неподвижно закрепленной на оси втулки 8 и рычага 9 смещает колесико следящей системы 7. Колесико переходит на правую контактную ламель. При этом замыкается цепь сервомотора 10. который приходит во вращение и перемещает ползунок реостата 11. уменьшая сопротивление в цепи компенсационного двигателя 5. Последний будет увеличивать скорость до тех пор. пока снова не восстановится равновесие, т. е. поршень /, а с ним и колесико следящего устройства не вернутся в исходное положение. При этом шары центробежного регулятора тоже окажутся в исходном положении, т. е. радиус инерции -системы в положении равновесия сил остается неизменным. Однако скорость вращения щаров соответственно увеличится.
Как известно, динамическое давление потока пропорционально квадрату скорости его, т. е. I,, К сгде К - коэфициент Пито.
Это давление стремится сдвинуть поршень влево. Усилие, стремящееся сдвинуть поршень вправо, как впдно из фиг. 2, выражается формулой
т G
Рц PII, -co2/n fciU)2,
Г д
где ( -вес шара и вес тяг, приведенный к центру инерции системы, 6 9,81м сек-,
т-проекция наклонного рычага на ось поршня, г-.радиус инерции системы, ш-мгновенная угловая скорость двигателя 5. Из условия равновесия поршня
вытекает равенство сил:
Рд,,
где S-эффективная площадь поршня.
G Следовательно, Vs - , откус/
да скорость корабля
/G т . . ш AOJ, д .S li
где -Л - постоянный коэфициент.
Полученный результат показывает, что мгновенная скорость врашения кОМпенсационого двигателя пропорциональна мгновенной скорости потока.
При этом изменения .напряжения сети, температуры или сопротивления обмоток маш;ины не оказывают влияния на точность работы устройства.
Вращение поршня в сильной степени уменьшает все вредные трения и тем самым повышает точность работы устройства.
Так как пройденное расстояние можно выразить в виде
Л Г rdt А ,
то счетчик 13, связанный с валом двигателя 5, может быть отградуирован как указатель пройденного расстояния. При этом сама методика измерения пройденного расстоя ния не вносит никаких дополни1ельных погрешностей, как это имеет место в лагах, где компенсирующей величиной не является угловая скорость О). Поэтому можно ол идать, что при правильно сконструированном и тщательно выполненном приборе, погрешность указателя пройденного расстояния может быть сведена до долей процента. Так как угловая скорость вращения двигателя 5 проиорциональна скорости потока, то вольтметр 14, включенный через реостат 12 «а зажимы двигателя 5, может быть отградуирован как указатель скорости. При этом падение напряжения на обмотке якоря двигателя 5 скажется не на точности работы вольтметра, а лишь на его градуировке, делая шкалу несколько неравномерной. Погрешность же вольтметра от колебаний напряжения питающей сети уменьшается до практически небольшой величины, благодаря наличию в цепи вольтметра реостата 12. Сопротивление, вводимое в цепь вольтметра, изменяется при колебаниях напряжения сети с по.мощью сервомотора 10.
Компенсация погрешности указателя скорости от колебаний напряжения сети может быть достигнута также при.менением в качестве указателя скорости логометра вместо вольтметра.
Вторая обмотка логометра должна быть включена на напряжение питающей сети (двнгатель 5 в этом случае должен работать в режи1ме слабого магнитного насыщения). Бели желательно получить Повышенную точность измерения скорости, то можно вольтметр включить на зажимы специальной тахо-динамо. вращаемой от того же двигателя 5.
При стабилизированном напряжении питающей сети в качестве указателя скорости может быть также использован движок реостата 11.
Следует отметить, что при больших углах отклонения оси подвижной уасти прибора (поршень и центробежное устройство) от горизонтали появляется ногрешность от собственного веса подвижной части
прибора. Для устранения этой гюгрешностп может быть использовано устройство, показанное па фиг. 3. Здесь на свободный конец оси поршня 1 жестко насажена втулка 2, па которую с помощью рычага 5 может давить груз 4. Из фиг. 4 ясно впдно, что груз G-2 компенсирует вес G подводной части прибора при отклонениях осч подвижноП части прибора от горизонтали. При этом вес груза Gt должен удовлетворять уравнению
г г
-2 Г .
где li и /--плечи рычага 5.
То же са.мое Мч)жно получать с помощью груза 18 (показан на фиг. 1 пунктиром), закрепленного на рычаге следящей системы.
Как известно, коэфициент Пито в общем виде выражается формулой /C a--j V, где а - постоянная поправка, о - коэфициент переменной поправки.
Для того чтобы сохранить соответствие мелчду показанпямп прибора и действительной скоростью корабля и его пройденным расстоянием, необходима менять один из параметров прибора таким образом, чтобы сохранила место основная зависимость
. -. / G
ю Л
О).
CJ S k Условием
постоянства коэфицнента А является постоянство отношения
k a+bv
где переменным параметром принята величина т. изменение которой легко осуществить смещением контактов следящей системы или смещeнiie r двигателя 5 вдоль оси штока.
Для удовлетворения условия т o-f зш - - const fc а Ч- OV
при всех скоростях необходимо равенства
jпг
а о fc
где у. - постоянная часть поправки параметра т и 3 - коэфициент
поправки парапере.меннои части метра т.
Практически введение поправки в схеме осуществляется с помощью регулятора поправки 19 (фиг. 1), который производит требуемое смещение контактов 7 следящей системы и этим В1,одит иоиравку для .Побой скорости.
Для автоматического нведеи.ия иоиравок при .тюбых скоростях можно примен1ггь устройство, npiiведениое на фиг. 5. ПОСТОЯРЬ ная поправка в рассматриваемом устройстве вводится -смешением конта.ктов 7 следящей системы относительно качающейся платы 15, переменная же поправка ввод1ггся изменением плеча и;тока с колесиком 16 относительно точки качания рычага 17. которьи через зубчатые передачи связан с осью сервомотора 10. Отработка сервомотора 10, :как уже указывалось выше, практически ятзляется линейной функцией угловой скорости двигателя 5 (при слабом магнитном иа,сыщенни мотора).
Если желательно получить более точное введение неремонтюй ноиравки, то рычаг 17 с,тедует связать через специальную следящую систе.му с указателем скорости.
Пред м е т и з о б р е т е н и я
1. Устройство для измерения скорости потока (или корабля) с npii eнeн e.м трубки Пнто, рабо1aioMiee по компенсациониОму способу, отличающееся тем. что для получения компенсирующего изменение скорости нере 1ещения поршня. воспринимающего динамическое и
CTaTiiHGCKOc давления среды, служит установленный на щтоке этого иоршня центробежный регулятор, призод1 мый во вращение электродвигателем и управляющий следяiiieii счстезюм, регулирующей со ротквлеиие в цепи приводного :1,вигате.пя, скорость которого яв.тясчси меро измеряемой скорости потока (корабля).
2.Форма 15ыпо.:1нения устройства ио и. 1. отличающаяся те.м, что. с целью устранения ошибки s из.1грС1И1ях. вносимой отклонением подвижной части прибора (штока с иоршием) от горизонтального положения, на свободном конце щтока noMein,eii уиор, взаимодействующий с вилкой, расположенной на ко-нце свободно подвешенного рычага с ура|5Иовешизаюш,1ГМ1 грузом.
3.В 1дсизменен;1е устройства по и. 2, о т л и чающееся тем, что груз закреплен на рычаге, соединяющем втулку центробежного регулятора с кОНтакто.м следящей системы, и служит д,чя перемещения р.оследиего при отклонении полви.жкой части прибора от горизонтального положення.
4.Форма выполнения устройства по к. 1. о т л и чающаяся тем, чтс;, с целью обеспечения соответcizv-я ме.жду показаниями прибора и дейстЕУтсльной скоростью потока (кс:рабл$,) при любых скоростях, jK;ik,;ib3G.3ai-;o пзменение радиуса инерции врашаюшейся части центробежнс.го г.гсхаиизма, достигае.мое смешснкем контактов следящей системы или смгшение1М лриводиого двигателя вдоль штока поршня.
Фиг. .1
к ре ишерам
| название | год | авторы | номер документа |
|---|---|---|---|
| Лаг | 1935 |
|
SU47846A1 |
| Устройство для регулирования скорости вращения машин высокой частоты | 1926 |
|
SU12142A1 |
| УПРАВЛЯЕМЫЙ ЛАГ | 1925 |
|
SU12580A1 |
| Автоматический регулятор | 1937 |
|
SU58790A1 |
| Гидравлический лаг | 1946 |
|
SU70215A1 |
| Регулятор скорости непрямого действия для двигателя внутреннего сгорания с реверс-редукторной передачей | 1976 |
|
SU577305A1 |
| Двигатель внутреннего сгорания | 1985 |
|
SU1268770A1 |
| Регулятор скорости непрямого действия | 1982 |
|
SU1054560A1 |
| Регулятор скорости непрямого действия для двигателя | 1971 |
|
SU507703A1 |
| РЕГУЛЯТОР СКОРОСТИ ПОДЪЕМНЫХ МАШИН | 1941 |
|
SU67427A1 |
Фиг. 3
Коси cepSoMomopa 10
