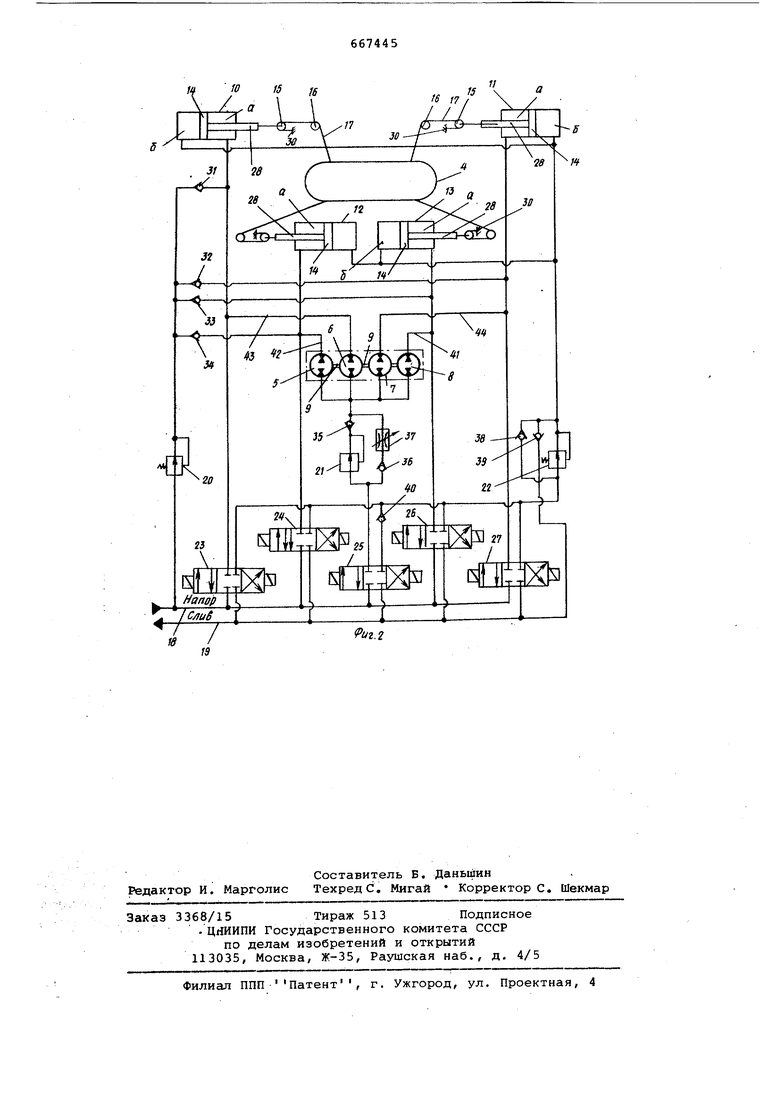
Изобретение относится к судострое нию и касается конструирования судовых устройств для спуска и подъема исследовательских аппаратов. Известно судовое устройство для спуска и подъема исследовательского аппарата, содержащее выдвижной мост с трособлочной системой и грузовыми подвесками, грузовые лебедки и центрирующий узел, смонтированный в зоне палубы 1. Недостаток такого устройства заключается в низкой точности посадки исследовательского аппарата на посадочное место и в возможности повреждения исследовательского аппарата. Цель изобретения - повышение точности посадки исследовательского аппарата на посадочное место и предохранение его от повреждений. Для этого центрирующий узел в пре лагаемом устройстве содержит гидравл ческий синхронизатор, силовые цилинд ры с поршнями, полиспасты с подвижными и неподвижными блоками, оттяжки, напорный и сливной трубопроводы, редукционные клапаны и гидрозлектроманипуляторы, при этом подвижные бло -ки полиспастов установлены на концах щтоков силовых цилиндров, оттяжки запасованы через подвижные и неподвижные блоки полиспастов и соединены одними концами с исследовательским аппаратом, а другими концами - с палубой, причем штоковые и поршневые полости силовых цилиндров посредством редукционных клапанов, гидравлического синхронизатора и гидроэлектроманипуляторов соединены с напорным и сливным трубопроводами. Кроме того, гидравлический синхронизатор выполнен в виде четырех гидромоторов,, валы которых кинематически связаны между собой, а рабочие полости их соединены соответственно гидравлическими -линиями со штоковыми полостями силовых цигиндров и через редукционный клапан - с гидроэлектроманипулятором. На фиг. 1. схематически изображено описываемое устройство на фиг. 2 - гидравлическая схема правления натяжными приспособлениями. Описываемое устройство содержит выдвижной мост 1 с трособлочной системой 2 и грузовыми подвесками 3, на которых подвешен исследовательский аппарат 4, и центрирующий узел. Центрирующий узел содержит гидравлический синхронизатор, выполненный 3 в виде четырех гидромоторов 5-8, валы 9 которых кинематически связаны между собой, силовыецилиндры 10-13 с поршнями 14, полиспасты с подвижными и неподвижными блоками 15 и 16, оттяжки 17, напорный и сливной трубопровЬды 18 и 19, редукционные клапаны 20, 21, 22 и гидроэлектроманипу ляторы 23-27. Подвижные блоки 15 полиспастов ус тановлены ha концах штоков 28 силовых цилиндров 10-13, оттяжки 17 запа сованы через подвижные и неподвижные блоки 15 и 16 полисплавов и соединены одними концами легкоразъемными со динениями 29 с исследовательским апп ратом 4, а другими .концами соединен посредством обухов 30. с палубой, што ковыё и поршневые полости а и б сило вых цилиндров 10-13 посредством реду ционного клапана 20, обратных клапанов 31-34 гидравлического синхронизатора, обратных клапанов 35 и 36, редукционного клапана 21, регулятора расхода 37, обратных клапанов 38, 39, редукционного клапана 22, обратного клапана 40,. гидроэлектроманипуляторов 23-27 соединены с напорным и сливным трубопроводами 18 и 19 соответственно. Рабочие полости гидромоторов 5-8 синхронизатора соединены соответственно гидравлическими линиями 41-44 со штоковыми полостями а силовых цилиндров 10-13 и через обратные клапа ны 35,36,редукционный клапан 21 и ре гулятор 37 расхода соединены с гидроэлектроманипулятором 25. Устройство работает следующим образом. После присоединения исследователь кого аппарата 4 к грузовым подвескам 3 включают грузовые лебедки (на чертеже не показаны) по подъем, мост 1 закатывается и останавливается над местом постановки аппарата по-походному. Оттяжки 17 быстросъемными соедине ниями 29 соединяют с аппаратом 4. После этого грузовые лебедки включают на травление, а центрирующий узел в работу. При работе в ручном режиме, напри мер, цилиндром 10 необходимо подать питание на один электромагнит гидроэлектроманипулятора 23. При этом рабочая жидкость из напорного трубопровода 18 через соответствующую полость гидроэлектроманипулятора 23 поступает в штоковую полость а цилинд ра 10. Из поршневой полости б цилиндра 10 рабочая жидкость через обратный клапан 36, соответствующую полость гидроэлектроманипулятора 23 выжимается в сливной трубопровод 19. ulTOK .28 цилиндра 10 втягивается, и происходит натяжение оттяжки 17 центрирующего узла. Для ослабления натяже454НИН от7яжки 17 необходимо подать питание на другой электромагнит гидроэлектроманипулятора 23. При этом рабочая жидкость из напорного трубопровода 18 через соответствующую полость гидроэлектроманипулятора 23, редукционный клапан 22 поступает в полость б цилиндра 10 центрирующего узла. Из штоковой полости а этого цилиндра 10 жидкость через соответствующую полость гидроэлектроманипулятора 23 выжимается .в сливной трубопровод, 19. Шток 28 выдвигается из цилиндра 10, ослабляя натяжение оттяжки 17. Подачей питания на электромагниты гидроэлектроманипулятОров 24, 26 и 27 можно привести выдвижение штоки 29 цилиндров 11-13 и отцентрировать аппарат 4 при посадке на посадочное место с большой точностью. При опускании аппарата 4 в автоматическом режиме рабочая жидкость из напорного трубопровода 18 через соответствующую полость гидроэлектроманипулятора 25, редукционный клапан 21, обратный клапан 35 поступает в гидромоторы 5-8, разделяясь на четыре потока, и равными дозами поступает в штоковые полости а цилиндров 10-13 центрирующего узла. Из поршневых полостей б этих цилиндров рабочая жидкость через обратные клапаны 38 и 40 и соответствующую полость гидроэлектроманипулятора 25 выталкивается в сливной трубопровод 19. При отсутствии колебательного движения аппарата 4 давление рабочей жидкости на гидромоторах 5-8 одинаковое. Усилия на штоках цилиндров 10-13 также одинаковы и определяются давлением, на которое настроен редукционный клапан 21. При колебаниях аппарата 4 усилия на штоках 28 цилиндров 10-13 не одинаковы. При-движении аппарата 4 в сторону цилин дров 10 и 11 усилия на штоках 28 их цилиндров уменьшаются, а -. усилия на штоках 28 противоположных цилиндров 12 и 13 возрастают, препятствуя движению аппарата 4 в сторону цилиндров 10, 11. При обратном движении аппарата 4 усилия на штоках 28 цилиндров 12 и 13 уменьшаются, а усилия на штоках 28 цилиндров 10 и 11 возрастают, препятствуя движению . исследовательского аппарата 4 в сторону цилиндров 12 и 13. При подъеме аппарата 4 с посадочного места штоки 28 цилиндров 10-13 под действием нагрузки со стороны оттяжек ,17 выходят из цилиндров и выталкивают рабочую жидкость через гидомоторы 5-8, регулятор 37 расхода, братный клапан 36, соответствующую олость гидроэлектроманипулятора 25 в ливной трубопровод 19. При этом в оршневые полости а этих цилиндров 10-13 рабочая жидкость засасывается из сливного трубопровода, в котором жидкость находится под избыточным давлением, через обратный клапан 39. При остановке аппарата 4 в любом промежуточном положении принцип цент рирования остается тем же,нто и при опускании аппарата. В этом случае в поршневые полости б цилиндров 10-13 рабочая жидкость поступает из сливного трубопровода 19 через обратный клапан 39, а в штоко.вые полости а цилиндров при уменьшении давления в них через обратные клапаны 31-34. Дл ограничения давления подачи рабочей жидкости предусмотрен редукционный клапан 20. Формула изобретения 1. Судовое устройство для спуска и подъема исследовательского аппарата, содержащее выдвижной мост с трос блочнрй системой и грузовыми подвесками, грузовые лебедки и центрирующий узел, смонтированный в зоне палубы, отличающееся тем что, с целью повьашения точности поса ки исследовательского аппарата на посадочное место и предохранения его От повреждений, центрирующий узел содержит гидравлический син}грони атор, силовые цилиндры с поршнями, полиспасты с подвижными и неподвижйыми блоками, оттяжки, напорный и сливной трубопроводы, редукционные клапаны и гидроэлектроманипуляторы, при этом подвижные блоки полиспастов установлены на концах штоков силовых цилиндров, оттяжки запасованы через подвижные и неподвижные блоки полиспастов и соединены одними концами с исследовательским аппаратом, а другими концами соединены с палубой, причем штоковые и поршневые полости силовых цилиндров посредством редукционных клапанов, гидравлического синхронизатора и гидроэлектроманипуляторов соединены с напорным и сливным трубопроводами. 2. Устройство по п. 1, отличающееся тем, что гидравличес кий синхронизатор выполнен в виде четырех гидромоторов, валы которых кинематически связаны между собой, а рабочие полости их соединены соответственно гидравлическими линиями со штоковыми полостями силовых цилиндров и через редукционный клапан - с гидроэлектроманипулятором. Источники информации, принятые во внимание при экспертизе 1. Проект научно-поискового судна Одиссей , 1972.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выборки слабины в грузовых канатах спуско-подъемных устройств на волнении | 1975 |
|
SU652035A1 |
| Рекуперативный гидропривод лесовозного тягача с полуприцепом | 2019 |
|
RU2726987C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНО-ПУСКОВЫМ КОНТЕЙНЕРОМ МИННОГО ЗАГРАДИТЕЛЯ | 2010 |
|
RU2442944C1 |
| Гидравлическое устройство для комплектации и приработки деталей с плотным соединением | 1989 |
|
SU1655756A1 |
| Гидропривод бурильной установки | 1987 |
|
SU1583598A1 |
| Рекуперативный гидропривод лесовозного автомобиля с прицепом | 2023 |
|
RU2810823C1 |
| Мобильное средство для монтажа трубопроводных модулей | 2016 |
|
RU2620185C1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 2005 |
|
RU2289150C1 |
| Рекуперативный гидропривод лесовозного автомобиля | 2017 |
|
RU2668093C1 |