(54) УСТРОЙСТВО ДЛЯ РАСТРОВОЙ СТЕРЕОСЪЕМКИ

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ РАСТРОВОЙ СТЕРЕОСЪЕЛ1КИ | 1971 |
|
SU294122A1 |
| РАСТРОВОЙ СТЕРЕОСЪЕМКИ | 1972 |
|
SU340997A1 |
| Устройство для перемещения по дуге при стереофотосъемке | 1985 |
|
SU1278791A1 |
| Установка для растровой стереосъемки | 1974 |
|
SU531119A1 |
| Устройство для контроля сдвига съемочного линзового растра | 1985 |
|
SU1361497A1 |
| Устройство для трехмерной съемки | 1977 |
|
SU711529A1 |
| Устройство для фотограмметрического измерения координат конструкций | 1987 |
|
SU1539520A1 |
| Способ мониторинга дорожного полотна автомобильных дорог | 2021 |
|
RU2762538C1 |
| Устройство для стереофотосъемки лицевой части головы человека | 1983 |
|
SU1115718A1 |
| Панорамный стереофотоаппарат | 1987 |
|
SU1493977A1 |


Изобретение относится к кинотехнике, а в частности к растровой стереосъемочной аппаратуре.
Известны установки и аппараты для стереофотосъемки, содержащие механизмы перемещения фотокамеры по направляющим и механизм перемещения растра 1.
К недостаткам данных систем относятся отсутствие синхронности перемещения фотокамеры, растра и включения затвора и неудобство поузловой наладки, требующей фотографических проб.
Наиболее близким техническим рещением к изобретению является устройство для растровой стереосъемки, в котором съемочный аппарат перемещается по дуге окружности, в котором одновременно с движением съемочного аппарата осуществляется синхронный привод устройств, предназначенных для перемещения растра, взаимосвязь перемещения растра и фотокамеры устанавливается счетно-рещающим механизмом в зависимости от параметров съемки (величины щага растра и базиса 2.
Однако в этом устройстве ход съемочной камеры, а следовательно, и путь, проходимый за это время растром, счетно-рещающим устройством не лимитируется, а устанавливается с помощью регулируемых конечных выключателей, что не обеспечивает необходимой точности перемещения растра на
один щаг.
Целью изобретения является повыщение
точности перемещения растра относительно
фотослоя на один щаг за время экспозиции.
Это достигается тем, что устройство для
растровой стереосъемки, содержащее привод и механизм перемещения съемочной камеры по дуге окружности и растра, снабжено электроконтактным датчиком, выполненным в виде двух взаимноповоротных электрических контактов и расположенного между ними поворотного контакта, связанного через зубчатые секторы с винтом подачи растра, и дифференциальным механизмом, выполненным в виде двух винтов, связанных между собой промежуточным колесом, которое через систему рычагов и зубчатых передач связано с винтом подачи растра и с приводом.
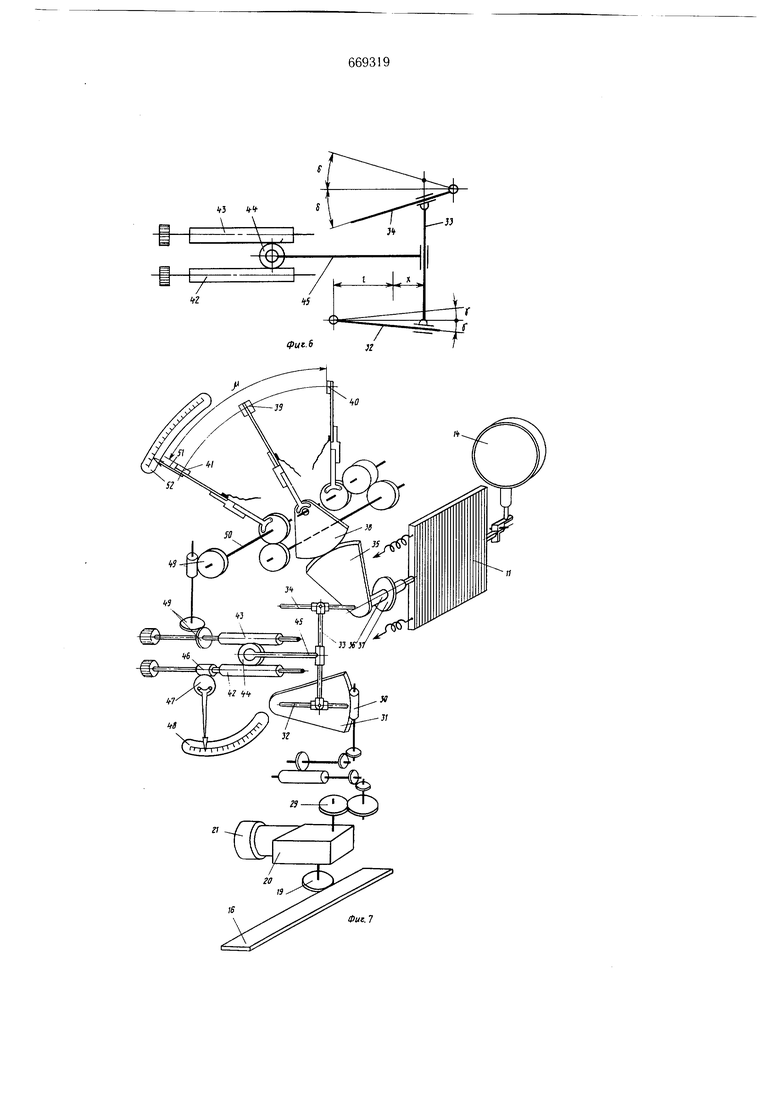
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - схема механизмов устройства в его c|)i.uuvi по.ло/кс-ним lui I/iio тем ycTpotk на (()иг, 3 (.xvvia .ll)/l tiiiiii Me.,iiiii, ycTpoiic nia i, (iponecrc 140 линжения; на |()нг. 1схема нм.ю/ь iшм
ди(|)(|)ере11Ц11а.1ЬНСЛ() .,ма MJHI наиоо. |ь тих и наименьших значениях тага икчр.а н базиса; на фиг. 5 схема положений дифференциального механизма нри 11аиГ)о.льи1е.м значении базиса и наименьшем значении растра; на фиг. 6-схема положений дифференциального механиз.ма при наименынем значении базиса и наибольшем значении растра; на фиг.7 - кинематическая схема нриводов стереофотоанпарата; на фиг. 8 нринциниальная электрическая схема устройства.
На складном Н1тативе 1, снабженном четы()ьмя иоворотнымн вокруг вертика..1ьной оси колесами 2, винтами 3 для создании неподвижности, а также двумя боковыми онорами 4, иредназначенными для восприятия внецептренных нагрузок, установлено оспование 5, iiecynLee нараллельные нанравляюшие 6, но которым неременизется плита 7. На илите 7 установлены новоротпый стол 8 и подвижная нлита 9, на которой укренлен стерео()отоа И1арат 10, снабженный растром 1 1 и механизмом 12 перемещения его. На стереофотоаннарате 10 также размешены кассета 13 для фотослоев и контрольный индикатор 14, предназначенный для визуального наблюдения за перемещением растра I 1 li процессе спземки.
На основании 5 также распо:1ожен1)1 ;тпейка 15 с измепяемым углом паклопа для |)егулирования угла поворота стсреофотоанпарата 10 при съемке, зубчатая рейка 16, устройства электроунравле 1ия и автоматики (на чертеже не показаны), емонтированHijie на выдвижной плите 17, аварийпые конечпые выключатели 18.
Работа механизмов перемеп1,епия стерео(JK)ToainiapaTa 10 но дуге окружности нроисходит следуюшл1м образом.
Зубчатое колесо 19 получает вращение от редуктора 20 и электродвигателя 21, и, будучи сцепленным с рейкой 16, перемещает нлиту 7 по направляющим 6.
В процессе перемещения вилка 22, укрепленная на оси поворотного стола 8 и связанная роликами 23 с линейкой 15, разворачивает стол 8 на угол d, зависящий от yiMa J3 наклона линейки 15. Одновременно зубчатый сектор 24, расположенный на столе 8 и сцепленный с сектором 25, укрепленным неподвижно на плите 7, поворачивает рычаг 26, щарннрно связанный с рычагом 27, другой конец которого шарнирно укренлен па подвижной нлпте 9, и пере.мещает последнюю,
Таким образом, ири наличии трех виден 11е|)емен1ений обеспечивается результи)ующее переме|п,епие стереофотоаипарата 10 но
окружности с 11|)1и:з1и)льн() выбранным центром в преде.1ах oi минимально Возможного )асстояния до бесконечностн.
11анГ)аиляю1цая .линейка 28 с укреп.icf;1ыми на ней двумя роликами 23. из KOT(;pi)ix один скол1)3ит по .:1Ш1ейке 15, а другой в р,п.1ке 22, иредназначена для обеспечения геометрической точности разворота систе 11,1.
Олновременно с неремен1е1 ием стереофотоаннарата И) но окружности происходит не|)емен1ение растра 11.
При зубчатое Ko.ieco 29 ред л;тора 20 например, посредством зубчатых передач приводит во вращение червяк 30. который, в свою очередь, поворачивает чер15ячный сектор 31 и укреплепную на нем балку на некоторый угол. Затем балка .52 носредством перемещающейся тяги 33 новорачивает балку 34 и евязанный с ней зубчатый сектор 35, енабжен1Ц)1Й винтом 36, который, новорачиваясь в ненодвижно закренленной гайке 37, своим поступательным движением обеспечивает иеремеп1.ение раетра 11. Величина этого неремеп|енин визуально контролируется, ири необходимости, стрелочным индикатором 14.
Растр 11 посредством зубчатых секторов 35 и 38 связан с новоротным контактом 39 электроконтактного датчика, содержащего также и два взаимио иоворотных электроконтак1а 40 и 41, а также е дифференциальным механиз.мом, состоящим из двух винтов 42 и 43 и сцепленного с ними зубчатого колеса 44 с новодком 45.
При неизме1Н1ой величиие хода фотоаппарат 10 по направляющим 6 у1ол 2 Jf поворота ба.1ки 32 будет иостояшн м, а угол 28 новорота балкн 34 с сектором 35 и винтом 36 нодачи растра 11 будет из.меняться в зависимости от положения тяги 33.
Взаимоотношения этих углов новорота могут б)1ть опреде..1ены но следующей расчетной схеме. Например, если принять винт 36, нереме1цаюп1пй растр 11, с шагом виитовой линин 6 мм и задасться пределами возможпых niaroB растра 11 от 0,2 до 0,8 мм, то получатся, соответствепно, углы поворота винта 36, обеспечивающие эти подачи, от 12 до 48°. Зададимся также пределами используемых базисов от 200 до 800 мм и, соответствешю, углами поворота червячHOio сектора 31 также от 12 до 48.
Состав,:|яется расчетная таб.чица раз:п1Чных крайних соотношений ве.1ичин растра и базиса:
Базис 800-- 2 - 18
Базис 200- 2 j- - 12
Базис 800-2 --- 48
Базпс 200--2 j - 12
Растр 0,825
0,226 :.Растр 0.2 .ь ;Расгр (1.2:: :Величина расчетных перемещений X (см. фиг. 4, 5 и 6) тяги 33 определяется при этом следующей зависимостью:
-Р
где 6- произвольная, конструктивно выбранная величина.
Из данной зависимости следует, что положение тяги 33 (см. фиг. 4) соответствует как величине базиса 800 и ходу растра 0,8, так и величине базиса 200 и ходу растра 0,2 по причине, во-первых, равенства X О, и, во-вторых, геометрической суммы взаимных перемещений зубчатого колеса 44 при вращении винта 42, связанного через червяк 46 и зубчатое колесо 47 со щкалой 48 базисов и при вращении винта 43, связанного через зубчатые колеса 49 с. валом 50 контактов 40 и 41, которые при вращении винта 43 устанавливаются на необходимый угол ju (см. фиг. 7), а указатель 51 контакта 41 - на соответствующее деление щкалы 52 щагов растра 11.
Таким образом, посред-ством вращения регулировочных винтов 42 и 43 устанавливаются по щкалам 48 и 52 необходимые расчетные положения заданных базиса съемка и шага растра 11.
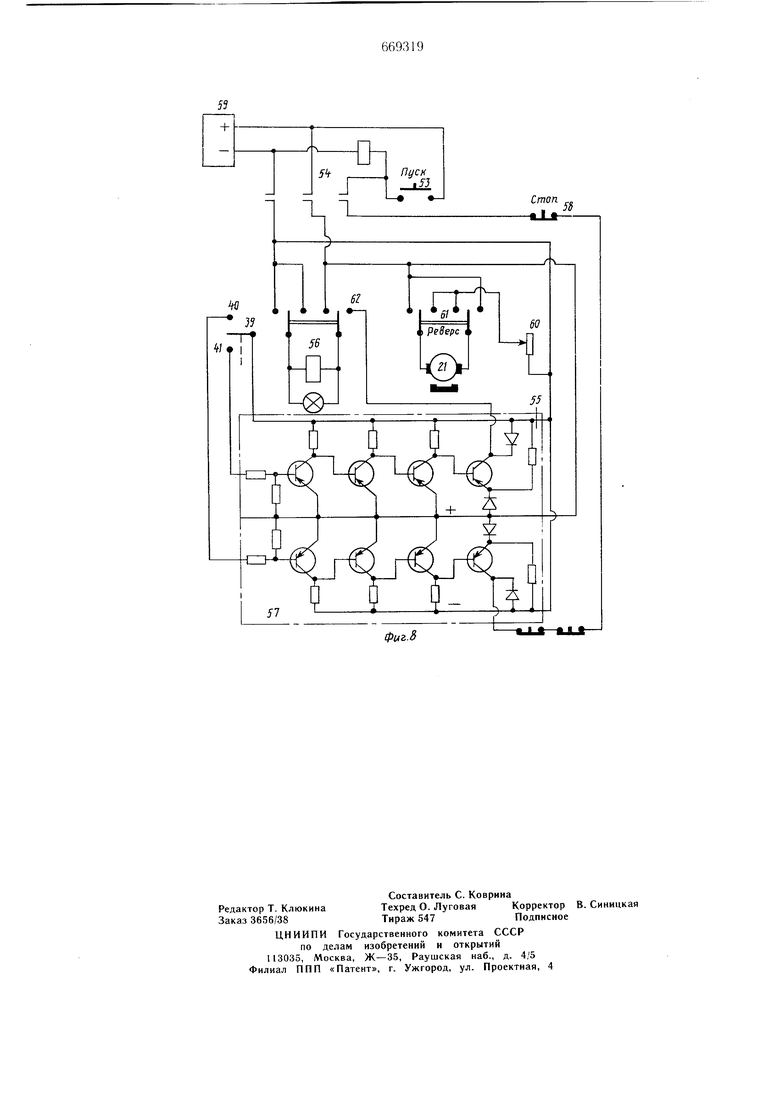
При нажатии кнопки 53 «Пуск срабатывает реле 54, включающее цепи питания и электродвигатель 21, что вызывает перемещение аппарата 10 по направляющим 6 и растра 11.
В начале работы контакты 41 и 39 замкнуты и фотозатвор (на чертеже не показан) закрыт. При замыкании этих контактов включается через транзисторную схему 55 электромагнит 56, открывающий фотозатвор, после чего начинается экспозиция и рабочий ход стереофотоаппарата 10.
При этом контакт 39 непрерывно перемещается от контакта 41 к контакту 40 и при замыкании с последним обесточивает через вторую транзисторную схему 57 цепь питания реле 54, после чего движение прекращается и фотозатвор закрывается.
Аналогично прерывается питание при нажатии кнопки 58 «Стоп или срабатывании конечных выключателей 18, предусмотренных как аварийные на случай не срабатыва
ПИЯ контакта электроконтактного датчика. В данной схеме предложено питание от источника 59 постоянного тока, что дает возможность регулирования скорости вращения электродвигателя 21 посредством потенциометра 60, а следовательно, н времени экспозиции. Для возврата всех систем в исходное положение предусмотрен переключатель 61 «Реверс, а для открытия фотозатвора при фокусировании - переключатель 62.
Для выполнения стереофотосъемки необходимо установить по шкалам необходимый базис съемки и ход растра, идентичный niaгу растра, имеющемуся в аппарате; установить скорость перемещения стерсо(|ютоаппарата, т.е. время экспозиции; сфокусировать объект по матовому стеклу; установить радиус дуги объезда, и нажать кнопку «Пуск. После этого вся съемка происходит автоматически в соответствии с заданным режимом.
Таким образом, предложенное устройство позволяет автоматически обеспечить необходимую выс.окую точность перемещения растра на один таг за время экспозиции.
Формула изобретения
Устройство для растровой стереосъемки, содержащее привод и механнзмь перемещения съемочной камеры по дуге окружности и растра, отличающееся тем, что. с целью повыщения точности перемещения растра за время экспозиции, оно снабжено лектроконтактным датчиком, выполненным в виде двух взаимно поворотных электрических контактов и расположенного между ними новоротного контакта, связанного через зубчатые секторы с винтом подачи растра, и дифференциальным механизмом, выполненным в виде двух винтов, связанных между собой промежуточным колесом, которое через систему рычагов и зубчатых передач связано с винтом подачи растра и с приводом.
Источники информации, принятые во внимание при экспертизе
фиг.
.
- L;::5:i:EL;:-f:i.l-
л
фиг.8
