выходы которых соединены с обмоткам 17, 18 датчика 5. Уст|ройст(во .работает следующим обра зам. ИмПульсы тактовой частоты от ге-.не ратора 1 за.пол«яют опорный делитель 2 На входы ш«ротн0-1ИМ;П ульсного синусно-кооинуоного преобразователя 3 поступают ч исловые коды со всех разрядов Опорного делителя 2 и реверсивного счетчика 4, со держимое которого в каждый момент времйНИ соответствует измеряемому механическому иврамещению. Широтио-имиульсиый синусно-косннусный преобразователь 3 вырабатывает че,редующиеся р.азиополяр.ные прямоугольные имлульсы стабидиз ирова,нной амплитуды, модулированные по длительности в соответствии с содержанием реверсивного счетчика 4, а также формирует поступающий на фазовый выход устройства прямоугольный импульсный сигнал, сдвиг по фазе которого соответствует измеряемому перемещению. С преобразователя 3 имнульсы поступают на датчик 5 (индуктосин, резольвер или фотоэлектрический датчик). При использо:ва1ии;и и-ндуктосина или резольве(р,а на две входные обмотки датчика 5 поступают две последовательности чередующихся разнололяреых прялюугольных имлульсов стабилизировашюй амплитуды, центры которых для обеих последовательностей им.иульсов совпадают между собой и сохраняют ф1ИК1Сированное во времеви положение относительно сигналов с опорного делителя, при1чем длительности импульсов ли1нейно зависят от оодврЖ1ИМ:ого реверсивного счетчика 4. Фильтр 6 выделяет первую гармоническую составляющую указанного сигнала, являющуюся оипналом р.асоогласования следящей системы. С выхода фильтра 6 сигнал рассогласования постоянной частоты поступает на оди1Н из входов блока демодуляции 7, а на другой его вход .поступает имиульоный прямоугольный оипнал с оп1Ор.ного делителя 2, пр1ичем сум.м а1р1ный сдвиг по фазе оилнала рассогласования постоянной частоты выбран таким, что в зависимости от знака рассогласования сигнал рассогласования на входе блока демодуляции 7 синхрофазен или нротивофазен имiпyльcнoмy сигналу с опорного делителя. На выходе блока демодуляции 7 формируется сигнал, имеющий постояиную составляющую, величина и знак .которой соответствует величине и знаку сигнала рассогласования цифровой следящей системы. Выход блока демодуляции 7 соединен со входом интегрирующего усилителя постояяного тока 8, на выходе которого формируется напряжение, полярность и величина которого определяются, соответственно, Направлением и скоростью перемеще.ния тока. Выход интегрирующего усилителя постоянного тока 8 соединен со входом преобразователя напряжения в частоту импульсов 9. Преобразователь напряжения в частоту импульсов 9, один из выходов которого соединен со входом счета, а другой выход - со входОМ обратного счета реверсивного счетчика 4, генерирует имп льсы, частота KOTOipbix соответствует абсолютной величине входного напряжеНия, причем в зависимости от поляр;ности входного напряжения эти импульсы поступают на вход прямого счета ил.и на вход обратного счета реверсивного счетчика 4, и изменяют его содержимое таким образом, что сигнал р1ассогл.асования на входе блока демодуляции 7 устанавливается равны.м нулю. Па вх0.ды сумматора 10 поступают в пря1.мых параллельных кодах содержимое onqpHoiro делителя 2 и содержилюе реверсивного счетчика 4. Па входы сумматора 11 содержимое опорного делителя 2 поступает в прямом, а содержимое реверсивного счетчика 4 - в обратном коде. При этом сдвиги по фазе имлульоных прЯМоугольных сигналов, снимаемых со старших разрядов сум;маторов 10 и 11, относительно сигнала с опорного делителя 2 соответствуют содержимому реверсив1Н|Ого счетчика 4, равны между собой по величине и противоположны .по знаку. Сигналы с сумМ аторов 10 и 11 поступают на лопический блок 12, управляющий блоком счетчиков 13, 14, 15, 16, выходы которых соединены с обмотками 17, 18 датчика 5 таким образом, что на них поступают чередующиеся, разнополярные прямоугольные импульсные сигналы, модулированные по длительности в соответствии с содерж1имым реверсивного счетчика 4. В предлагаемом устройстве более, чем на порядок, увеличивается статическая точность дреобразования и устраняемся ошибка, .прОпарц ианалыная скорости измеряемого перемещения. .агаемое устроЙ1Ство преобразует измеряемое перемещение в унитарный код, параллельный код и сдвиг по фазе прямоугольного импульса, что обеспечивает универсальность его применения. Ориманение стандартных элементов и тсутстВ(Ие индуктив,ностей обеспечивает возмож1ность МИ.кромИ1НИатюризации предагаемого устройства. Псиользование данного устройства в следящих систем ах и в системах числового программного управлеия станками позволит более, чем на поряок, увеличить статическую и динамичекую точность р.аботы указанных систем. аряду с высокой статичеокой и динамичекой точностью преобразования предлагаеое устройство обладаег высокой помехоащищенностью, избирательностью и повыенныМ коэффициентом усиления сигнала датчика, что обеспечив1ает его эффективое использование с прецизионными фотоэлектричбскимИ датчиками и датчикам-и типа «Индуктосин, полезный выходной сигнал которых составляет единицы милливольт. Формула изобретения
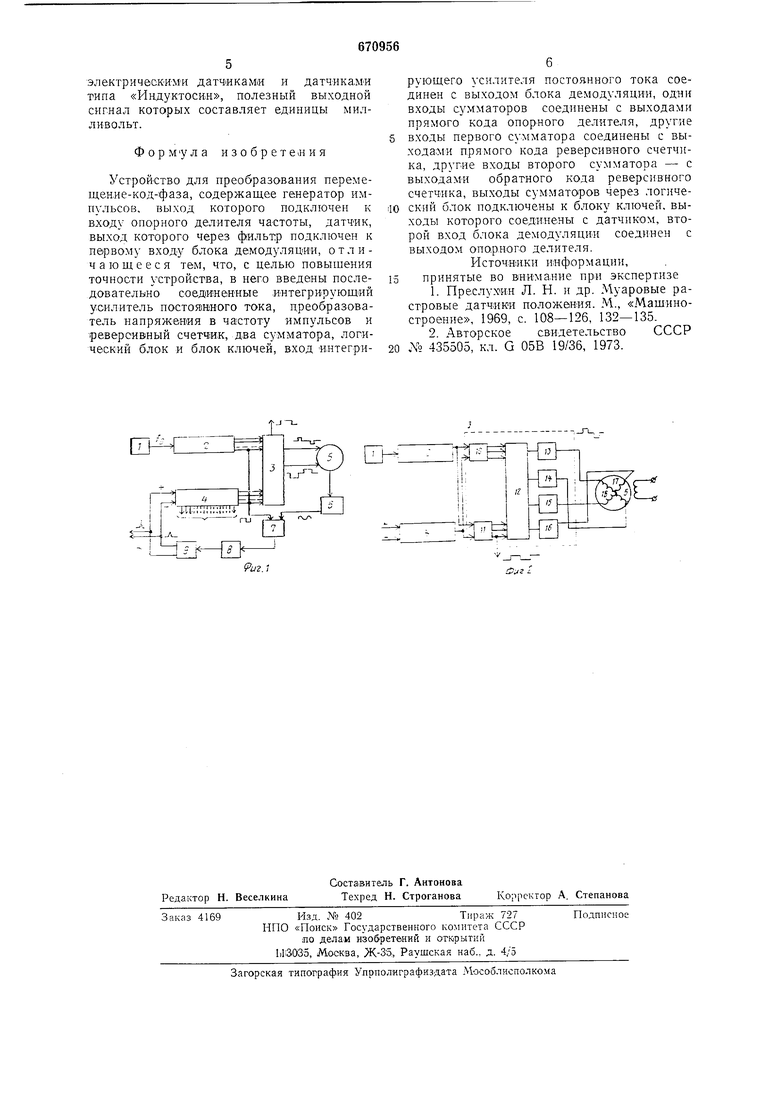
Устройство для преобразования перемещение-код-фаза, содержащее генератор импульсов, выход которого подключен к входу опорного делителя частоты, датчик, выход которого через фильтр подключен к первому входу блока демодуляции, отличающееся тем, что, с целью повышения точности устройства, в него введены последовательно соедияенные .интегрИ|рующ|ИЙ усилитель постояиного тока, преобразователь напряжения в частоту импульсов и реверсивный счетчик, два сумматора, логический блок и блок ключей, вход янтегриб
рующего усилителя постоянного тока соединен с выходом блока демодуляции, одни входы сумматоров соединены с выходами прямого кода опорного делителя, другие входы первого сумматора соединены с выходами прямого кода реверсивного счетчика, другие входы второго сумматора - с выходами обратного кода реверсивного счетЧИка, выходы сумматоров через логический блок подключены к блоку ключей, выходы которого соединены с датчиком, второй вход блока демодуляции соединен с выходом опорвого делителя.
Источаики информации, принятые во внимание при экспертизе
1.Преслух ин Л. Н. и др. Муаровые растровые датч1ИКи положения. М., «Машиностроение, 1969, с. 108-126, 132-135.
2.Авторское свидетельство СССР Ло 435505, кл. G 05В 19/36, 1973.

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой следящий привод | 1978 |
|
SU734607A1 |
| Широтно-импульсное устройство для программного управления приводом | 1981 |
|
SU1020799A1 |
| Устройство для преобразования "перемещение-код-фаза | 1978 |
|
SU746653A1 |
| Устройство для управленияпРиВОдОМ | 1978 |
|
SU809056A1 |
| Преобразователь угловых перемещений в код | 1978 |
|
SU926703A1 |
| Преобразователь угловых перемещений в код | 1982 |
|
SU1035627A1 |
| Устройство для управления шаговым приводом | 1985 |
|
SU1315941A1 |
| Асинхронный следящий привод | 1979 |
|
SU877469A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1991 |
|
RU2007027C1 |
| Устройство для формирования сигнала рассогласования | 1985 |
|
SU1317394A1 |
ц± ч Чг
