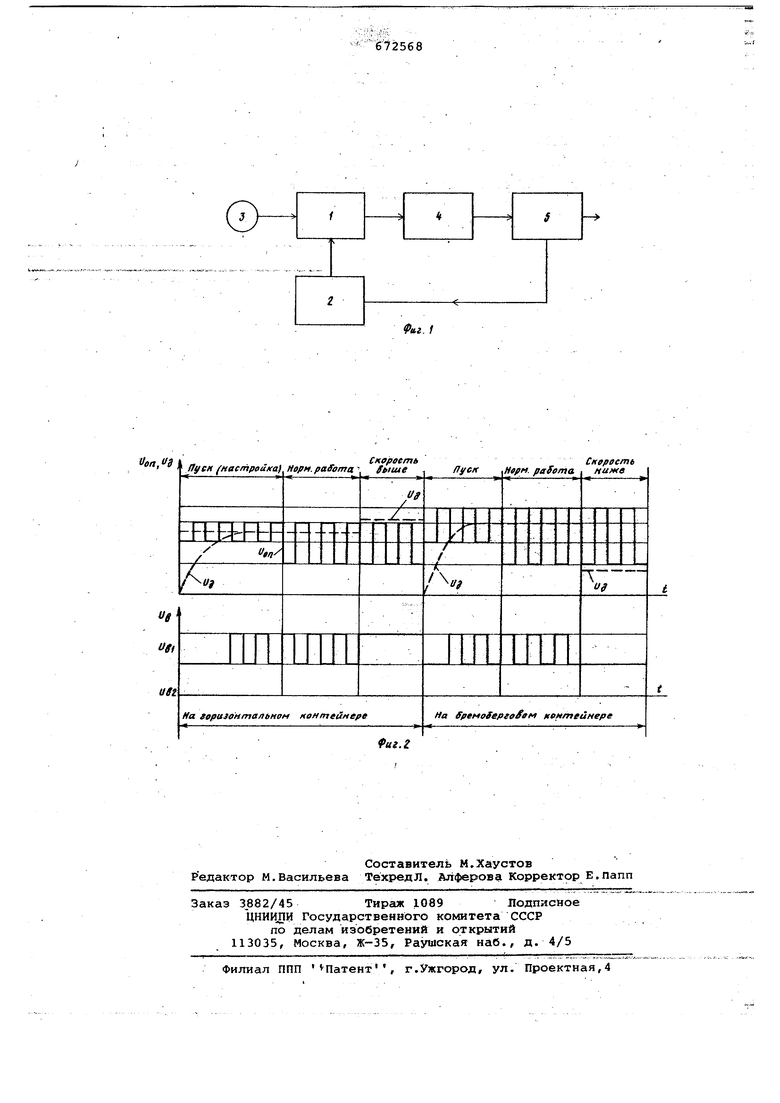
Изобретение относится к контролю скорости машин и механизмов, в частности скорости движения шахтных ленточных конвейеров, моноканатиых дорог. Известные способы, используемые в устройствах для контроля скорости движения шахтных ленточных конвейеров, основанные на том, что каждая контролируемая величина скорости име ет свой отдельный канал сравнения (измерения) 11,ШЗ . При контроле определенной величины скорости по этим спо,собам на узел сравнения (или измерения) подается сигнал с датчика скорости. Одновременно на узле сравнения задают уровень контролируе мой величины скорости в виде опорного напряжения или другой физической величины. Когда уровень сигнала датчика переходит через опорный уровень узел сравнения, изменяет выходной сигнал. Подобные способы контроля скороети по одному уровню облсщают недостаточной надежностью, так как возг можно случайное или намеренное изменение регламентированного уровня кон роля на значительную величину, и на каждый контролируемый уровень скорости требуется свой канал сравнения (измерения). Целью изобретения является повьпиение надежности контроля. Указанная цель достигается за счет того, что сравнение фактической скорости осуществляют по двум уровням - верхнему и нГИжнему, причем, в течение одного полупериода сравнения ее величину сравнивают с верхним уровнем, а в течение второго полупериода - с нижним уровнем. При этом выходной сигнал формируют переменным, когда фактическая скорость находится между заданными уровнями, и постоянным, когда фактическая скорость выходит за контролируемые пределы, а по уровню или зйаку выходного постоянного сигнала судят о превышении или снижении скорости. На фиг. 1 изображена блок-схема контроля скорости по предложенному способу; на фиг. 2 - графики опорных уровней и выходного сигнала. Сущность способа заключается в следующем. На узел сравнения (УС) 1 с определенной частотой поочередно полают от KONo«tyTaTopa 2 двух уровней сравнения (КУС) два .опорных уровня контроля - нижний и верхний. Одновременно на узел сравнения поступает сигнал от датчика 3 скорости, контролйрукядего движение конвейера. Если уровень сигнала ..датчика 3 находит ся между двумя опорными уровнями , то на выходе узла сравнения получают переменную выходную величину (Ug 1 Ug 2), пульсирующую с частотой изменения опорных уровней. Это происходи потому, что в один полупериод коммутации опорных уровней сигнал датчик /оказывается выше (больше) :минймального уровня, во второй полупериод ниже (меньше) максимального уровня, E6OTffeWia4WHa сигналадЙчЙ1 га прё1ысит верхний опорньй уровень или опус тШгсянйжё минимального, то ii оба полупериода коммутации опорных уров ней сигнал датчйка буде или брль1 е обоих уровней. На выходе узла сравн ёни я имёют постоя и ный §ых6дной сигнал. Уровень пб:стб;янКОГО ВйХОДно сигнала может имет два наченйя{ превьшеНИИ максимальноtoyipdBни и при уменьшений .ййже мййймальйброг урЬвйя. ; - . . , -,-.,,-, Например, при выполнении узла сравнения на опёра ци6нйом усилителе на один (инвертируемый) входйодают (Ьпорйый уровень, на второй (йёййвертируемый) - пбстоянноё мнп эяйсёнйе с датчика 3 скорости. На выходе операцйоийого усилителя 6 полупериод контроля, когда напряжение датчика . больше йижйего Опорного ., на выхоДе усилителя имеется плюсовое напряжение. ВО второй полупериод, ее ли напряжение датчика меньше верхне-Ш ЬйОрйОго УРОВНЯ, на выходе уси--ЛЙелй появляется отрицательное напряжёййе. При превншейий напряжением цатчкка. верхнего опорного уровня йг1выходе усйлителя будет постоянное .плюсовое напряжение в оба полупериода измерения, а при снижении измеряемой скорости ниже норкоа на выходе. усйлй4ел полупариода сраёнёнц имеете постоянное отрицательное напряжейие. Переменную составляющую выходного узла сравнения легко выделяют узлом выдеЛейия переменной составляющей (yncit и подают в выходной узел (УВ) 5. Коммутацию; с)п.ррных..роаней.рсущёствЛяют Ьт сети питания частотой 50 Гц или с другой частотой в эависййости от-принципа действия устройНа фиг. 2 в верхней части представлены для пояснения графики опорных напряжений Uon необходимых для контроля уровней в разных режимах работы и графики напр$1ж ния датчика скорости Ug, относительно опорных уровней ton В нижней части изображено напряжение U на выходе узла сравнения, соответствующее взаимному положению опорных напряжений,и напряжения датчика скорости. При соответствии скорости конвейера заданным значениям на выходе узла сравнения имеют переменную составляющую выходного, сигнала или только переменйый сигнал,как на операционном усилителе. При уходе скорости датчиf(a (конвейера) за контролируемые пределы перемейная составляющая выходного сигнала исчезает. К такому же явлению будет приводить появление подавляющего числа неисправностей в устройствах. Формула изобретения Способ контроля скорости движения шахтных лейточных конвейеров, основанйьгй На сравнейии фактической скорости с заданной уставкой и выработке выходного сигнала, о т л и ч а ю щ и и с я -тем., что, с целью повышеййя надёййрсти койтроля сравнения фактической скорости осуществляют по: двум уровняй - верхйему и нижнему, причем, в течейии одного полупериода сравнения ее величину сравнивают с вёрхйим уровнем,а в течение второго полуперИода - с нижним : уровнем/ при этом вы; 6днЬй сигнал формируют перемейныму когда Фактическая скорость находится между заданными уровнями и пОстояйййм, когДа фактическая скоpOeit ;еы:годйт за контролируемые пределы, а по уровню или знаку выходного постоянного сигйала судят о превьииении или снижении скорости. Источники ийформации, принятые во вйимание при экспертизе 1.Каталог-справочник Средства автоматизации шахтных конвейерных линийпод редакцией Ротенберг В.М. и ЖуховцёвоЙ А.И,, 1971. 2.Компайиец Л.И. и др. Контроль скорости ленты магистральных конвейеров. Новые средства автоматизации для угольной промышленности, вып. 3, 1967.. 3.Устройство типа АКП-1 для контроля пробуксовки и скорости конвейерных лент. Техническое описание, инструкция по эксплуатации, использование в унифицированных схемах управления ленточными конвейерами. . Гипроуглеавтоматизация (Ворошиловградский филиал), Ворошиловград, 1975.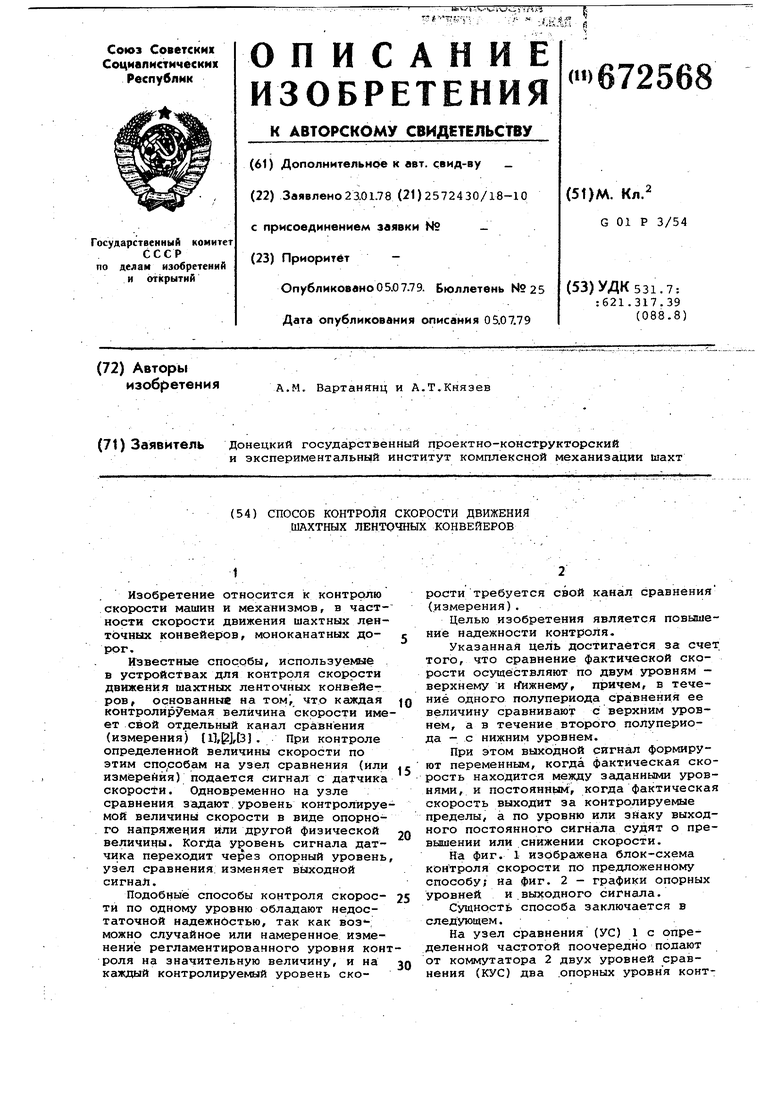
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КОНТРОЛЯ СКОРОСТИ ЛЕНТОЧНЫХ КОНВЕЙЕРОВ И ДВИЖУЩИХСЯ (ВРАЩАЮЩИХСЯ) УЗЛОВ МЕХАНИЗМОВ | 1995 |
|
RU2109305C1 |
| Устройство для управления электроприводом конвейера | 1985 |
|
SU1320137A1 |
| Устройство для управления тиристорным инвертором | 1978 |
|
SU767933A1 |
| Устройство для управления автономным регулируемым инвертором | 1985 |
|
SU1272430A1 |
| Устройство для автоматического контроля больших интегральных схем | 1986 |
|
SU1529220A1 |
| Способ контроля работоспособности ленточного конвейера и устройство для его осуществления | 1988 |
|
SU1555240A1 |
| Коммутационная схема для стабилизации сетевого напряжения | 1983 |
|
SU1261571A3 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Преобразователь постоянного напряжения | 1988 |
|
SU1589356A1 |
| Способ управлеия электродвигателем постоянного тока и устройство для его реализации | 1979 |
|
SU873367A1 |