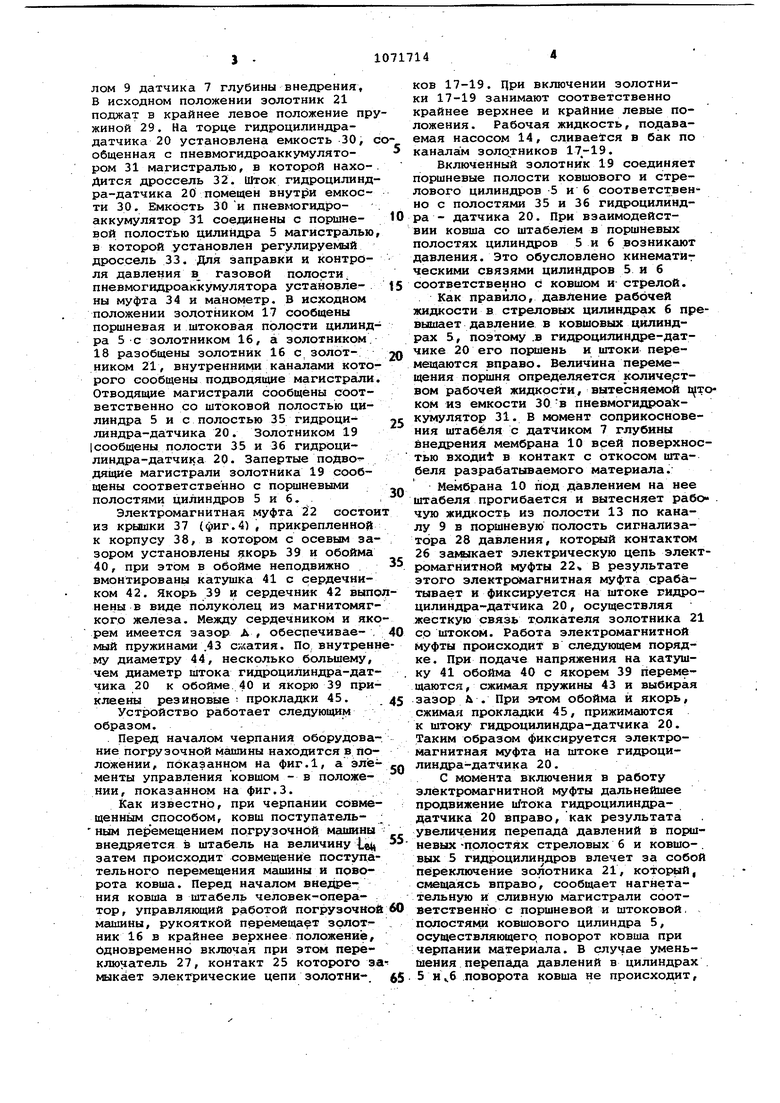
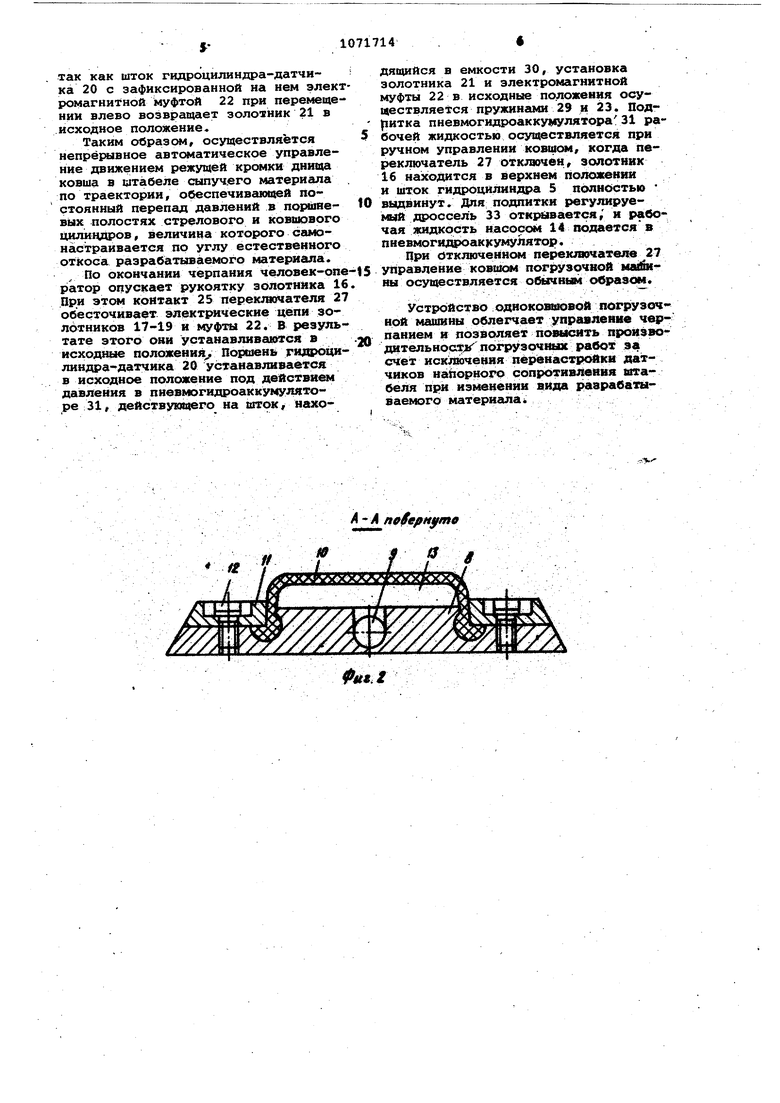
Изобретение относится к строитель вым и дорожным машинам, а именно к гидроприводам одноковшовых погрузочных машин. Известен гидропривод погрузочной машины, содержащий датчики, расположенные на платформе машины, гидроприемник и распределитель, управляющий работой цилиндра подъёма ковшаtl Недостатком указанного гидропри,вода является то, что у него отсутству ет самонастройка величины напор ного сопротивления штабеля в процессе черпания материала с различными физико-механическими свойствами. Так например, при работе погрузочной машины в легком сыпучем штабеле необходимо производить черпание при меньшем напорном сопротивлении, чем при работе с тяжелыми материалами и скальными породами (щебень, руда и т.дОПоэтому при заполнении ковша с шапкой различными сыпучими материалами требуются дополнительные затраты времени на перенастройку дат чика .напорного сопротивления на вели чину, соответствутощук виду разр абатываемого материала. Кроме того, для каждой модели погрузочной мгипины необходимо производить большой объем предварительных работ по установлению требуемых величин напорных сопротивлений. Наиболее близкой к изобретению является одноковшовая погрузочная ма шина, включающая ходовую часть с при водом и гидросистему, содержащую насос и гидроцилиндры стрелы и ковша с распределителями управления С21. Однако для задания величины базо вого значения напорного сопротивлен. штабеля,соответствунлцего его материа лу, требуются непроизводительные затраты времени на перенастройку да чика, что в конечном счете снижает производительность погрузочной машш ны. Целью изобретения является повьва ние производительности погрузочйой машины путем обеспечения непрерывно , автоматического управления движением режущей кромки днища ковша в штабе ле сыпучего материала по траектории сохраняющей постояйный перепад давлений в рабочих полостях гидроцилин ров ковша и стрелы, величина которого самонастраивается по углу естёс:т Таенного откоса разрабатываемого материала. Указанная цель достигается тем, что одноковшовая погрузочная машина, включающая ходовую часть с приво дом и гидросистему, содержащую насо и гидроцилиндры стрелы и ковша с распределителями управления, снабже датчиком глубины внедрения, установленным на внешней стороне боково стенки ковша под углом естественного откоса штабеля разрабатываемого , электросигнализатором давления с гидравлической полостью, которая связана с датчиком глубины внедрения гидроцилиндром-датчиком, управляющим золотником- с полым толкателем и установленной в последнем электромагнитной муфтой и электрогидравлическими золотниками, гидравлически связанными между собой, управляющим золотником и с гидроцилиндром-датчиком, при этом электрический контакт электросигнализатора дав ления включен в цепь управления электррмагнитной муфтой. На фиг.1 изобрс1жена одноковшовая погрузочная машина, общий на фиг.2 - продольный разрез А-Д на фиг.1 Сдатчик глубины внедрения ковша в штабель) , на фиг.З - принципиальная схема конструкции и взаимосвязи элементов ,управления ковшом погрузочной машины;на фиг. 4 - электромагнитная муфта, разрез. . Одноковшовая погрузочная мгшгана фиг.1 содержит базовое шасси 1, на котором смонтировано погрузочное оборудование, состоящее из стрелы 2 с ковшом 3, соединенным с поворотньвл механизмом 4, ковшовые 5 и стреловые 6 цилиндры и датчики 7 глубины внедрения, включенные в гидросистему. Датчик 7 глубины внедрения Сфиг.2) состоит из корпуса 8, в котором выполнен канал 9, и мембраны 10, зафиксированной в кольцевом уплотнительном пояске корпуса при помсяци крышки 11 и болтов 12. Корпус 8 и мембрана 10 между орбой образуют по.лость 13, которая сообщена с каналом 9. Мембрана 10 выполнена из полиуретана, обладающез о высокой эластичностью и износостойкостью. Принципиальная схема конструкции и взаимосвязи элементов управления ковшом содержит типовую гидросистему погрузочной машины, состоящую из насоса 14, золотников 15 и 16- управления стрелой и ковшом и цилиндров 5 и 6, в которую дополнительно позцключены двухпозиционные электрогидравлические золотники 17-19 гидроцилиндр-датчик 20 и управлякхойй золотник 21, в полом толкателе которого установлена с радиальным зазорсял электромагйитная муфта 22, поджатая пружиной 23. .. Электрогидравлические золотники 17-19 и электромагнитная муфта 22 подсоединены к источнику 24 питания, в электрическую цепь которого включеиы контакты 25 и 26 соответственно переключателя 27, установленного на рукоятке золотиина 16 и электросигнализатора 28 давления, соединенного гидравлической магистралью с каиалом 9 датчика 7 глубины внедрения, В исходном положении золотник 21 поджат в крайнее левое положение пружиной 29. На торце гидроцилиндрадатчика 20 установлена емкость 30, сообщенная с пневмогидроаккумулятором 31 магистралью, в которой нахо-. Дится дроссель 32. Шток гидроцилиндра-датчика 20 помещен внутри емкости 30. Емкость 30 и пневмогидроаккумулятор 31 соединены с поршне- Ю вой полостью цилиндра 5 магистралью, в которой установлен регулируемый дроссель 33. Для заправки и контроля давления в газовой полости, пневмогидроаккумулятора установле- |5 вы муфта 34 и манометр. В исходном положении золотником 17 сообщены поршневая и штоковая полости цилиндра 5с золотником 16, а золотником. 18 разобщены золотник 16 с золот-. JQ НИКОМ 21, внутренними каналами которого сообщены подводящие магистрали. Отводящие магистрали сообщены соответственно со штоковой полостью цилиндра 5 и с полостью 35 гидроци- 25 линдра-датчика 20. Золотником 19 сообщены полости 35 и 36 гидроцилиндра-датчика 20. Запертые поДво дяпдае магистрали золотника 19 сообщены соответственно с пориневыми полостями цилиндров 5 и 6. ,
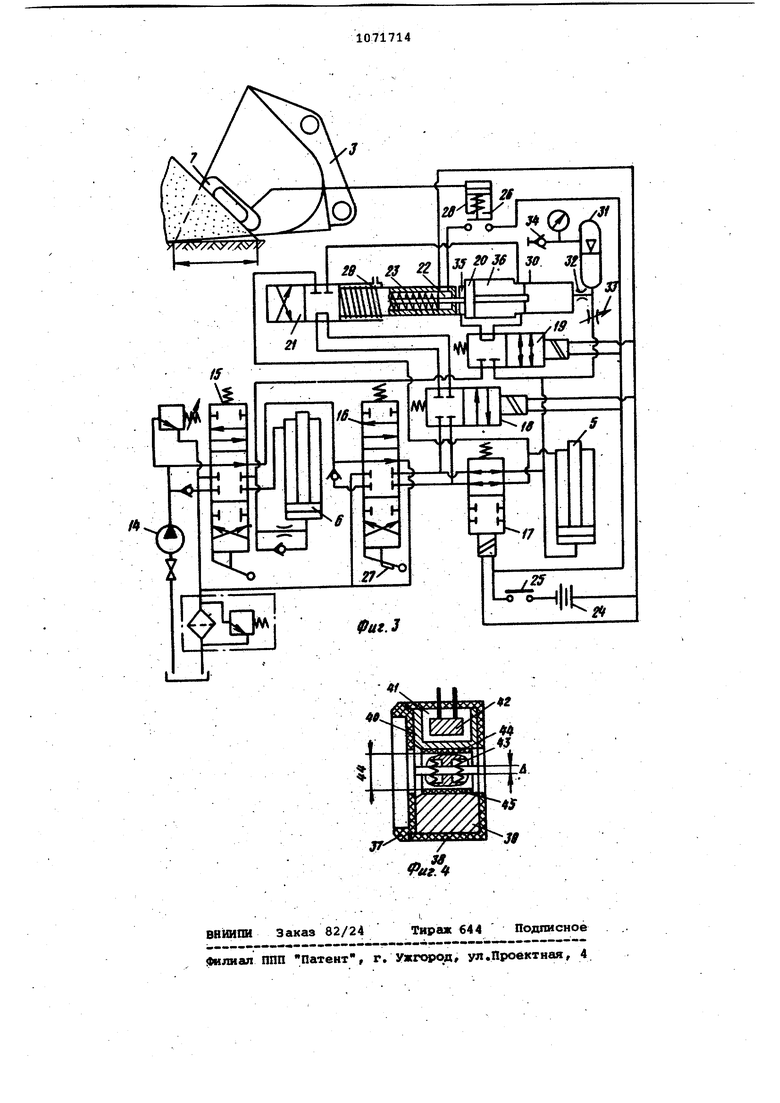
Электромагнитная муфта 22 состоит из крышки 37 (фиг.4), прикрепленной к корпусу 38, в котором с осевым зазором установлены дкорь 39 и обойма 40, при этом в обойме неподвижно 35 вмонтированы Катушка 41 с сердечником 42. Якорь 39 и сердечник 42 выполнены в виде полуколец из магнитомягкого железа. Между сердечником и якорем имеется зазор А , обесцечивае- , 40 мый пружинами .43 сжатия. По внутреннему диаметру 44, несколько большему, чем диаметр штока гидроцилиндра-датчика 20 к обойме 40 и якорю 39 приклеены резиновые прокладки 45. 45
Устройство работает следующим образом.
Перед началом черпания оборудование погрузочной машины находится в положении, показанном на фиг.1, а зле- „ менты управления ковшом - в положении, показанном на фиг.3.
Как известно, при черпании совмещеннь1м способом, ковш поступатель- ; ным перемещением погрузочной машины внедряется в штабель на величину, затем происходит совмещение поступательного перемещения машины и поворота ковша. Перед началом внедрения ковша в штабель человек-оператор, управляющий работой погрузочной 60 машины, рукояткой перемещает зрлот ник 16 в крайнее верхнее положение. Одновременно включая при этом переключатель 27, контакт 25 которого замыкает электрические цепи золотни-. 5
ков 17-19. Цри включении золотники 17-19 занимают соответственно крайнее верхнее и крайние левые положения. Рабочая жидкость, подаваемая насосом 14, сливаемся в бак по каналам золо,тников 17,-19.
Включенный золотник 19 соединяет поршневые полости ковшового и стрелового цилиндров 5 и 6 соответственно с полостями 35 и 36 гидроцилиндра - датчика 20. При взаимодействии ковша со штабелем в поршневых полостях цилиндров 5 и 6 возникают давления. Это обусловлено кинематиг ческими связями цилиндров 5 и 6 соответственно с ковшом и стрелой.
Как правило, давЛеИие рабочей жидкости в стреловых цилиндрах 6 превышает давление в ковшовых цилиндрах 5, поэтому .в гидроцилиндре-датчике 20 его порвиень и штоки перемещаются вправо. Величина перемещения по1миня определяется {соличертвом рабочей жидкости, вытесняемой Ц1тком из емкости 30 в пневмогидроаХкумулятор 31. В момент соприкосновения штабеля с датчиком 7 глубины внедрения мембрана 10 всей поверхностью входи в контакт с откосом штабеля разрабатываемого материала.
Мембрана 10 под давлением на нее штабеля прогибается и вытесняет рабо чую жидкость из полости 13 по каналу 9 в поршневую полость сигнализатора 28 давления, который контактом 26 заьйикает электрическую цепь электромагнитной муфты 22 В результате этого электрс 4агнитная муфта срабатывает и фиксируется на штоке гидроцилиндра-датчика 20, осуществляя жесткую связь толкателя золотника 21 со штоком. Работа электромагнитной МУФТЫ происходит в следующем порядке. При подаче напряжения на катушку 41 обойма 40 с якорем 39 перемещаются , сжимая пружины 43 и выбирая зазор J. При этом обойма и якорь, сжимая прокладки 45, прижимаются к ШТОКУ гидроцилиндра-датчика 20. Таким образом фиксируется электромагнитная муфта на штоке гидроцилиндра-датчика 20.
С момента включения в работу элёктрсмагнитной муфты дальнейшее продвижение истока гидроцилиндрадатчика 20 вправо, как результата увеличения перепада давлений в поршневых -полостях стреловых 6 и ковшовых 5 гидроцилиндров влечет за собой переключение золотника 21, который, смещаясь вправо, сообщает нагнетательную и сливную магистрали соответственно с поршневой и штоковой, полостями ковшового цилиндра 5, осуществляющего, поворот ковша при черпании материала. В случае уменьшения перепада давлений в цилиндрах 5 поворота ковша не происходит.
так как шток гидроцилиндра-датчи- ка 20 с зафиксированной на нем электромагнитной муфтой 22 при перемещении влево возвращает золотник 21 в исходное положениеТаким образом, осуществляется непрёр«лвное автоматическое управление движением режущей кромки днища ковша в штабеле сыпуч.его материала . по траектории, обеспечивающей постоянный перепад давлений в поршневых полостях стрелового и ковшового цилицдров, величина которого самонастраивается по углу естественного откоса разрабатываемого материала.
По окончании черпания человек-оператор опускает рукоятку золотника 16. При этом контакт 25 переключателя 27 обесточивает элект|«ческие цепи золотников 17-19 и муфты 22. В результате этого они устанавливаются в исходные положения,. Поршень гидаоцилиндра-датчика 20 устанавливается в исходное положение под действием давления в пиевмогидроаккумуляторе 31, действукяоего на шток, находящийся в емкости 30, установка золотника 21 и электромагнитной муфты 22 в исходные положения осуществляется пружинами 29 и 23. Под|1итка пневмогидроаккумулятора31 рабочей жидкостью осуществляется при ручном управлении ковшом, когда переключатель 27 отключен, золотник 16 находится в верхнем положении и шток гИдроцилиндфа 5 полностью
выдвинут. Для подпитки регулируеКВ4Й дроссель 33 откхмйвается, и рабочая жидкость насосом 14 1юдаетсяв пневмогидроаккумулятор.
При отключенном переклочателе 27
управление ковш(| погрузочной мшби ны осуществляется o6i«Hfa«i образом.
Устройство:однокошаовой погрузочной машины облегчает управление черпанием и позволяет noBiiKUiTb пройзводительиостХ погрузочных работ з счет исклоючения перенастройки датчиков наборного сопротивления штабеля при измеиении вида раарабашВаемого материалаi
| название | год | авторы | номер документа |
|---|---|---|---|
| ФРОНТАЛЬНЫЙ ПОГРУЗЧИК | 2002 |
|
RU2235170C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЧЕРПАНИЕМ СЫПУЧЕГО МАТЕРИАЛА | 2002 |
|
RU2235171C2 |
| Ковшовая погрузочная машина | 1978 |
|
SU775342A2 |
| Одноковшовая погрузочная машина | 1982 |
|
SU1071713A1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ФРОНТАЛЬНОГО ПОГРУЗЧИКА | 1992 |
|
RU2092658C1 |
| Гидропривод ковшового погрузчика | 1979 |
|
SU1273463A1 |
| СИСТЕМА УПРАВЛЕНИЯ ОДНОКОВШОВОГО ПОГРУЗЧИКА | 2019 |
|
RU2729537C1 |
| ФРОНТАЛЬНЫЙ ПОГРУЗЧИК С ЭНЕРГОСБЕРЕГАЮЩИМ ГИДРОПРИВОДОМ ПОГРУЗОЧНОГО ОБОРУДОВАНИЯ | 2005 |
|
RU2306389C2 |
| Ковшовый погрузчик | 1979 |
|
SU789377A1 |
| Одноковшовая погрузочная машина | 1988 |
|
SU1566047A1 |
ОДНОКОВиЮВАЯ ПОГРУЗОЧНАЯ МАШИНА, включакхцая ходовую часть с приводе и гидросистему, содержаикую насос и гидроцилиндры стрелы и ковша с распределителями управления, о тл и ч а ю щ а я с я тем, что,с целью повышения ее производательности, она снабжена датчиком глубины внедрения, установленным на внешней стороне боковой стенки ковша под углом естественного откоса штабеля раэраба-тываемого грунта, электросигнализатором давления с гидравлической по- . лостыб, которая связана с датчиком глубины внедрения, гидроцилиндромдатчиксж, управлякяцим золотником с поЛым толкателем и установленной в последнем электромагнитной муфтой и электрогидравлическими золотниками, гидравлически связанными между ,с управляющим золотником и сгидроцилиндр 1-датчиком,при этом электрический контакт электросигна- лизатора давления включен в цепь (О управления электромагнитной муфтой 4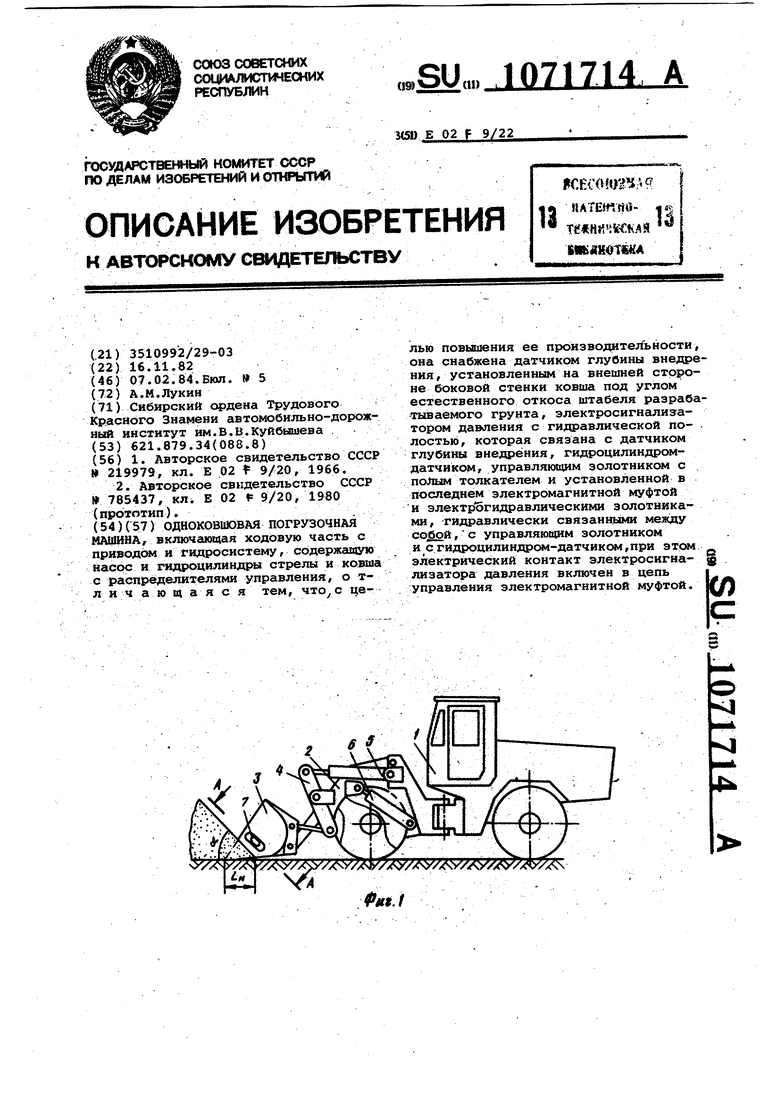
tf
tX2
. /
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 0 |
|
SU219979A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления процессом черпания | 1978 |
|
SU785437A1 |
