(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИИ ДЕТАЛЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения деформацийдЕТАлЕй | 1979 |
|
SU848991A1 |
| Автоматическое устройство для установки вала в отверстие | 1983 |
|
SU1090521A2 |
| СПОСОБ ЗАПИСИ НА ПОВЕРХНОСТЬ МАСШТАБИРОВАННОЙ КОПИИ ИЗОБРАЖЕНИЯ-ОРИГИНАЛА | 1994 |
|
RU2074410C1 |
| Самоустанавливающаяся головка робота | 1984 |
|
SU1274902A1 |
| Устройство для автоматической сборки деталей | 1981 |
|
SU1007897A1 |
| АВТОМАТ ДЛЯ РАЗМЕРНОЙ СОРТИРОВКИ ДЕТАЛЕЙ | 2017 |
|
RU2670732C9 |
| Устройство для шаговой подачи | 1979 |
|
SU820072A1 |
| Устройство для подачи и отбраковки упакованных предметов | 1987 |
|
SU1502421A1 |
| МЕХАНИЗМ РАЗЖИМА БРУСКОВ ХОНИНГОВАЛЬНОГО СТАНКА | 1990 |
|
RU2009860C1 |
| Устройство для подачи и перемещения изделий | 1989 |
|
SU1724547A1 |
Изобретение относится к конструкциям устройств для измерения деформации в широком диапазоне температур и может быть использовано для измерения линейной деформации деталей и образцов при механических испытаниях в научно-исследовательской работе и для производственного контроля, преимущественно в труднодоступных для измерения местах, например в термокриокамерах.
Известны устройства для измерения линейной деформации деталей, содержащие две тяги, связанные с испытываемым образцом по границам его расчетной длины и соединенные с датчиком линейных перемещений, расположенным за пределами термокриокамеры 1.
Недостатком таки)( устройств является низкая точность измерений вследствие различных температурных деформаций тяг, находящихся в несколько различных температурных условиях.
Наиболее близким техническим решением к изобретению является устройство для измерения деформаций деталей в широком диапазоне температур, содержащее два щупа
с траверсами, закрепляемыми в контролируемых точках детали, две тяги, одна из которых одним концом соединена с одним из щупов, и датчик разности перемещений тяг 2.
Однако и это устройство не обеспечивает высокой точности измерений, так как средние и локальные коэффициенты теплового расширения тяг неодинаковы, поэтому неодинаковы и их тепловые деформации, кроме того, при изменении температуры окружающей среды значения температуры тяг в точности не совпадают и одна из тяг нагревается или охлаждается, а следовательно, и деформируется быстрей другой.
Целью изобретения является повышение точности измерения.
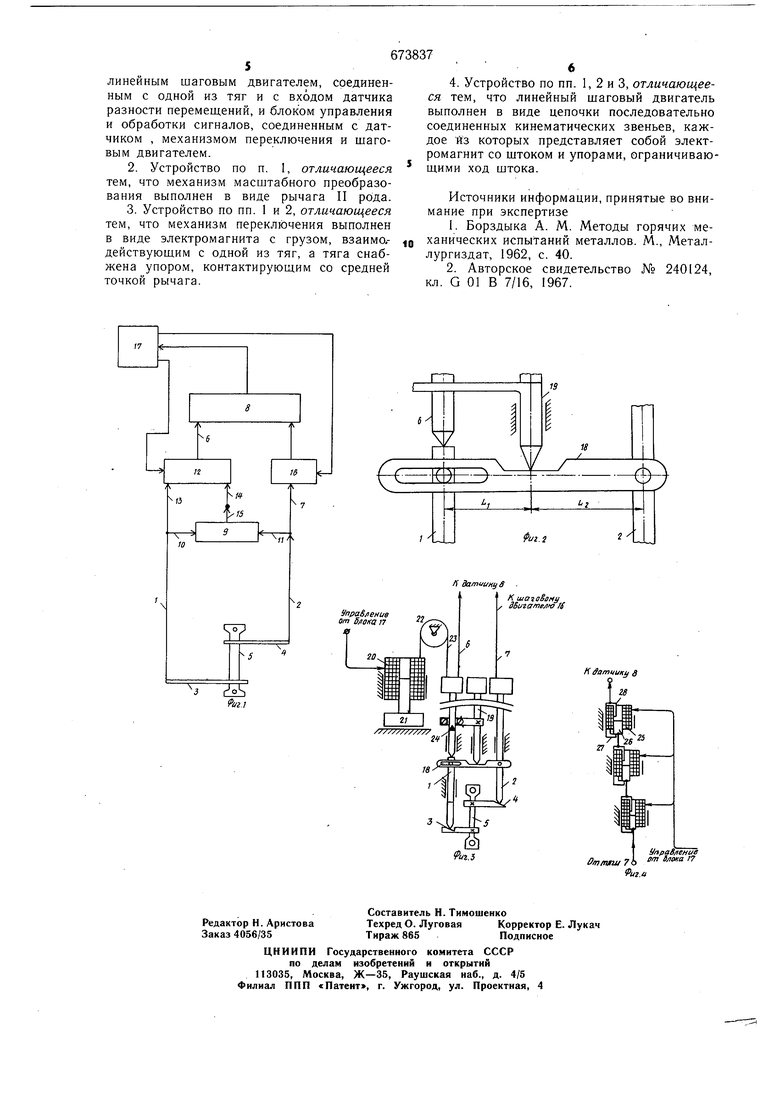
Цель достигается тем, что устройство снабжено механизмом масштабного преобразования разности перемещений, входы которого соединены со щупами, механизмом переключения, входы которого соединены с другим щупом и с выходом механизма преобразования, а выход - с другой тягой, линейным шаговым двигателем, соединенным с одной из тяг и с входом датчика разности перемещений, и блоком управления и обработки сигналов, соединенным с датчиком, механизмом переключения и шаговым двигателем, а также тем, что механизм масштабного преобразования выполнен в виде рычага II рода. Механизм переключения выполнен в виде электромагнита с грузом, взаимодействуюш.им с одной из тяг, а тяга снабжена упором, контактируюш,им со средней точкой рычага. Линейный шаговый двигатель выполнен в виде цепочки последовательно соединенных кинематических звеньев, каждое из которых представляет собой электромагнит со штоком и упорами,ограничивающими ход штока. На фиг. 1 представлена общая блоксхема устройства; на фиг. 2, 3 и 4 - отдельные узлы устройства, варианты выполнения. Устройство содержит два щупа 1 и 2 с траверсами 3 и 4, закрепленными на конт ролируемых точках детали 5, две тяги 6 и 7, одна из которых (тяга 7) одним концом соединена со щупом 2, датчик 8 разности перемещений тяг индуктивного типа, механизм 9 масштабного преобразования разности перемещений, входы 10 и 11 которого соединены со щупами 1 и 2, механизмом 12 переключения, входы 13 и 14 которого соединены со щупом I и с выходом 15 механизма преобразования 9, а выход - с тягойгой 6, линейный щаговый двигатель 16, соединенный с тягой 7 и с входом датчика 8 разности Перемещений, И блок 17 управления и обработки сигналов, соединенный с датчиком 8, механизмом 12 переключения и щаговым двигателем 16. Примером конкретного выполнения механизма 9 масщтабного преобразования (см. фиг. 2) может служить рычаг II рода 18, своими концами щарнирно соединенный со щупами 1 и 2 и передающий на толкатель 19, служащий выходным звеном механизма 9, преобразованное значение разности перемещений щупов 1 и 2. Коэффициент преобразования механизма 9 удобно выбирать равным 1/2, для чего участки рычага 18 между толкателем 19 и концами рычага выполняют равной длины (Ц Ц). Примером конкретного выполнения механизма 12 переключения (см. фиг. 3) может служить электромагнит 20 с грузом 21, соединенный через блок 22 гибкой связью 23 с тягой 6, снабженной упором 24. Примером конкретного выполнения линейного шагового двигателя (см. фиг. 4) может служить цепочка последовательно соединенных кинематических звеньев, каждое из которых представляет собой электромагнит 25 со штоком 26 и упорами 27 и 28, ограничивающими ход щтока 26. Устройство работает следующим образом В режиме грубого измерения, с которого начинается измерительный цикл, перемещение щупов 1 и 2 через тяги 6 и 7 передается на датчик 8 и регистрируется блоком 17 в оперативной памяти. При этом все электромагниты 20 и 25 выключены, и перемещение толкателя 19 не передается на тягу 6, так как последняя своим весом давит на опорную площадку щупа I, а толкатель 19 не контактирует с упором 24. В режиме измерения с одновременной сквозной градуировкой измерительного тракта сначала включается электромагнит 20, что приводит к срабатыванию механизма 12 переключения. При этом вес электромагнита 20 с грузом 21, поднимающимся с опорной плоскости, становится больие веса тяги 6, и последняя прижимается упором 24 к толкателю 19. При этом датчик 8 преобразует разность перемещений тяги 7 и толкателя 19 в электрический сигнал, который запоминается в блоке 17. Затем электромагнит 20 выключается, и последовательным включением электромагнитов 25 в различных комбинациях осуществляется в окрестности величины сигнала, зафиксированного ранее при включении электромагнита 20, ступенчатая сквозная градуировка измерительного тракта, результаты которой также запоминаются в блоке 17. После сравнения результатов измерений иградуировки в блоке .7 осуществляется регистрация уточненных значений деформации. в режиме непрерывного измерения деформации электромагнит 20 постоянно включен, а электромагниты 25 выключены. Уточненные значения деформации регистрируются в блоке 17 после сравнения текущих результатов измерений с градуировкой, выполненной в предыдущем режиме. Использование предложенного устройства позволяет в несколько раз уменьшить погрешности измерений деформации деталей в широком диапазоне температур и при длине тяг до нескольких метров и более, Формула изобретения 1. Устройство для измерения деформаций деталей в щироком диапазоне температур, содержащее два щупа с траверсами, закрепляемыми в контролируемых точках детали, две тяги, одна из которых одним концом соединена с одним из щупов, и датчик разности перемещений тяг, отличающееся тем, что, с целью повыщения точности измерений, оно снабжено механизмом масштабного преобразования разности перемещений, входы которого соединены со щупами, механизмом переключения, входы которого соединены с другим щупом и с выходом механизма преобразования, а выход - с другой тягой.
