Изобретение относится к областа машиностроения и металлургии и может быть использовано при термообработке деталей, при плавке, при нагреве перед пластической деформа цией и т.д. Известно устройство для решения сопряженных задач, содержащее RC-се ку, функциональный преобразователь и блок задайия граничнйх условий Ш Наиболее близким техническим решением к изобретению является система управления процессом нагрева, содержащая моделирующее устройство для решения уравнений теплопроводности, один выход которого подключен к выходу оптимизатора, блок выделения модуля, блок задания эталонного напряжения, выход которого соединен с первым входом блока срав нения 2 . Скорость решения уравнения б известных устройствах ограничивается постоянной времени интегратора, поэ тому оптимальное управление, найД1гнное методом поиска, заключающегося в многократном решении уравнения теплопроводности с раэлйчньтн управляющими воздействиями, возможно использовать в целях управления нагревом только в следующем технологическом цикпё, причем только тогда, когда вариациями параметров объекта управления, вызываюкф мн вариации управляющего воздействия, на протяжёйии одного цикла можно пренебречь. Кроме того, наличие неконтролируенлзх возмущений/ стохастически воздейсфв ощих на объект, требует непрерывной идентификации объекта и коррекции с одной целью параметров интегратора, что в известных устройствах не предусмотрено. Целью изобретения является повышение точности За счет учета воздействий неконтролируеьшх помех. Указанная цель достигается тем, что в систему введены регулятор кющности, элемент задержки, релейный коммутатор, синхронизатор, сумматор, иитегра зры и датчик температуры, выход которого подключён к первому входу cyiiwaTopa, выходы которого через первую, группу замыкающих контактов релейного коммутатора соединены со входами соответствующих интеграторов, выход которых через вторую группу замыкающих контактов Е1елейного коммутатора подключеша ко второму входу сумматора, выходы
й егратера соедийё11ы Й другаКш ходами моделирующего устройства ля решения уравн.ений теплопроводости/ выход которого подключен о второму входу блока сравнения, выход которого соединен со входом оптимизатора, выход которого через цепочку из последовательно соединенных элемента задержки и регулятора мощности подключен ко входу объекта управления, выход которого подключен ко входам датчика темперА- . туры и синхронизатора соответственнее выход синхронизатора соединен со входом релейного коммутатора.
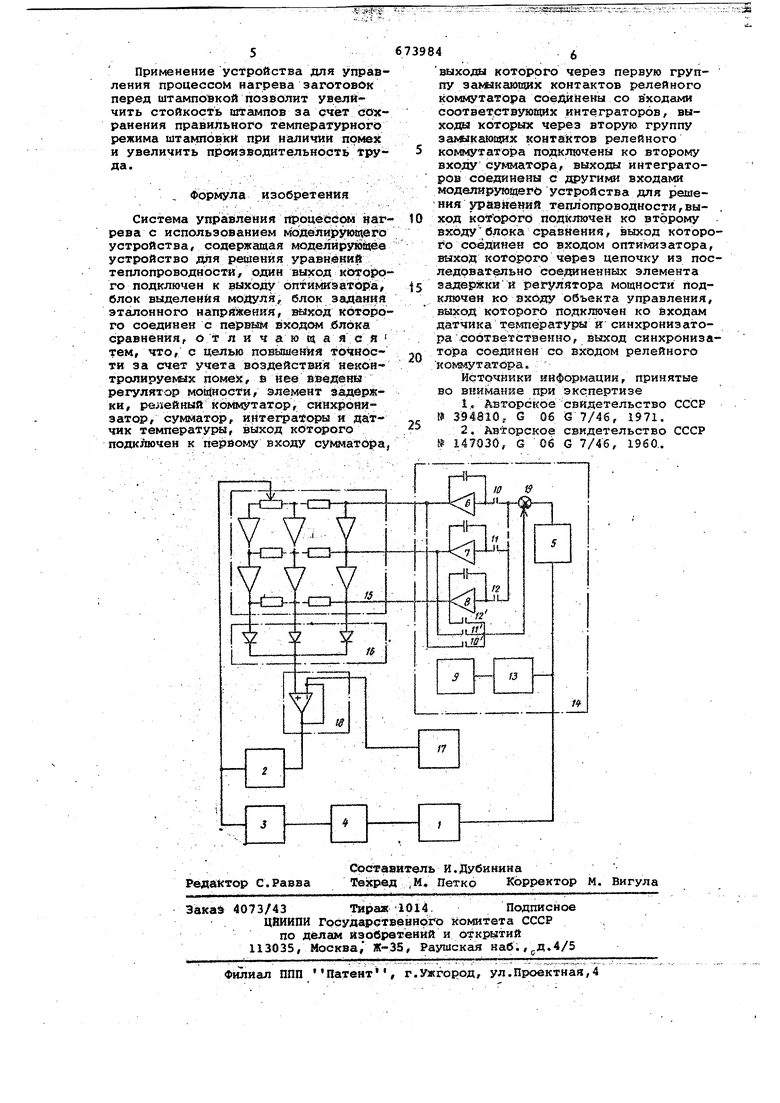
Блок-схема устройства представлена на чертеясе. Устройство содержит объект управлений 1, представляющий собой нагреватель с яагреваеквлм тё;юм7оптйШэатор 2/ эШШнт задержки 3, регулятор мощности 4) датчик температуры 5, который контролирует температуру поверхности нагреваемого тела, интеграторы б, 7, 8, релейный коммутатор 9, пер1вую группу замыкающих контактов релейного, коммутатора 10-12, вторую группу замыкающих контактов релейного коммутатора iO-12,
Датчик Температуры 5 вместе с интеграторами б, 7, 8, релейньам комMi taTopdM 9 и синхронизатором 13 составляют идентификатор 14, присоединенный к граничньал узлам моделйрунадего устройства 15 для решения уравнений теплопроводноети, представл яющёго собой сеточный йнт еграTQP, узлы которого подключены ко входу блока 16 вйделения модуля. 17 эт алоннрго напряжения- яодключен к перво входу блока сравнения 18. Первый вход сумматора . 19 подключён-k выходу датчика температуры 5.
Устройство работает следующим образом.
С поступлением натреваемогр тела в нагреватель срабатывает сй нхронизатор 13 и коммутатор 9 своим контактом 10 fipkuSeaHrHi«er a:a:f4Sif Температуры 5 « ШЩбЩ р ШШййму слою сеточного интегратора 15 через астатическ1то систему стабилизации, состоящую из интегратора 6, охваченного обратной отрицательной связью. Система уравновешивает на 1рйж;енив на г ани1:ш пленного слоя сеточного интегратора., и напряжение датчика температуры 5, пропорциональное температуре поверхности тела на первом участке дискретизгщии временной переменной.
Одновременно Ёыставляк}тся нгачальные условия, соответствукхцие данно му процессу. По ис1Гечёнии временя, сйответствующе ч даск| т релеЙниЙГ кo i l /тaтop 9 (Мт ifjtoaную цепь и обратную связь первого интегратора 6, на котором эШош673984
Тн ается| уравновевденное напряжение и замыкает цепь второго интегратора 7, процесс повторяется для следующего временного слоя.
Таким образом осуществляется идентификация процесса по граничньа условиям.
Если в процессе нагрева на объект воздействуют помехи, изменяющие температуру его поверхности, то благодаря действию идентификатора, эти изменения отразятся на состоянии сеточного интегратора.
Оптимальное по большинству критёрйев управляющее воздействие представляет собой.комбинацию импульсов максимальной мсмдности нагревателя, чередую{1 ихся с периодами отключения нагревателя. Поэтому поиск оптимального управления заключается в поиске гдаментовпереключения мощности. Блок 16 выделения модуля, представляюащй собой диодную матрицу, выделяет максимальное модулю напряжение С узЛ0в ;се4Очного ийтегратора is. Это напряжение сравнивается на блоке сравнения 18 - балансном усилитеЛе с эталонным напряжением с блока 17 задания эталонного напряжения.
Если критерием оптимальности служит так называемый минимаксный крйтерй)Й, который требует выбора такого управляющего воздействия, которое в момент Окончания процесса нагрева обеспечит ;минимально в(эзможнре отклонение температуру Ьт заданной во всех точках дискретизаций сечения заготовки, то управление . зв этом случае обеспечит тНкжё и максимально возможную производительность установки.
Диодная матрица - блок 16 выделения модуля, в этом случае подключается к узлам интегратора, соответствующим времени окончания процесса. Влрк 16 выделения модуля совместно с блоком срав1нения 18 и блоком 17 задания эталонного напряжения форлв руют случае экстремальную хйрактерйсГ ику, имеющую глобальный экетрёйгум в точке минимума критерия рптимгшьНости, Принципиальным является то, что характеристика формйруетйя на основе температурного поля ВОжсём временном диапазоне, включая прогнозируемые моменты времёйк. - . 5 в силу безинерционности сеточного интегратора 15, оптимизатор 2: отыскивает оптимальное управление (моменты переключения) значительно 1)аньше,чем наступает время переклю
0 чать управление на объекте и через элемент задержки 3, это управление ре1|итизуется на объекте. Непрерывна;; работа идентификатора 14 обуславлибаёт сдх:райвнив оптимальности управ5 лвния при наличии неконтролируемых . .
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления процессом нагрева с использованием моделирующего устройства | 1979 |
|
SU868708A2 |
| Устройство для приготовления смеси | 1982 |
|
SU1024886A1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА (БАГИС-А) | 1995 |
|
RU2097780C1 |
| Сеточный интегратор для решения дифференциальных уравнений в частных производных | 1960 |
|
SU147030A1 |
| Система автоматического управления периодическим процессом ферментации | 1989 |
|
SU1666538A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Индукционный нагреватель заготовок | 1984 |
|
SU1245604A1 |
| СПОСОБ ЗАЩИТЫ ТРЕХФАЗНОЙ СЕТИ С РЕЗИСТИВНО-ЗАЗЕМЛЕННОЙ НЕЙТРАЛЬЮ ОТ ОДНОФАЗНЫХ ЗАМЫКАНИЙ НА ЗЕМЛЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2352044C1 |
| Устройство для измерения коэффициента отражения двухполюсника СВЧ | 1990 |
|
SU1805407A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
