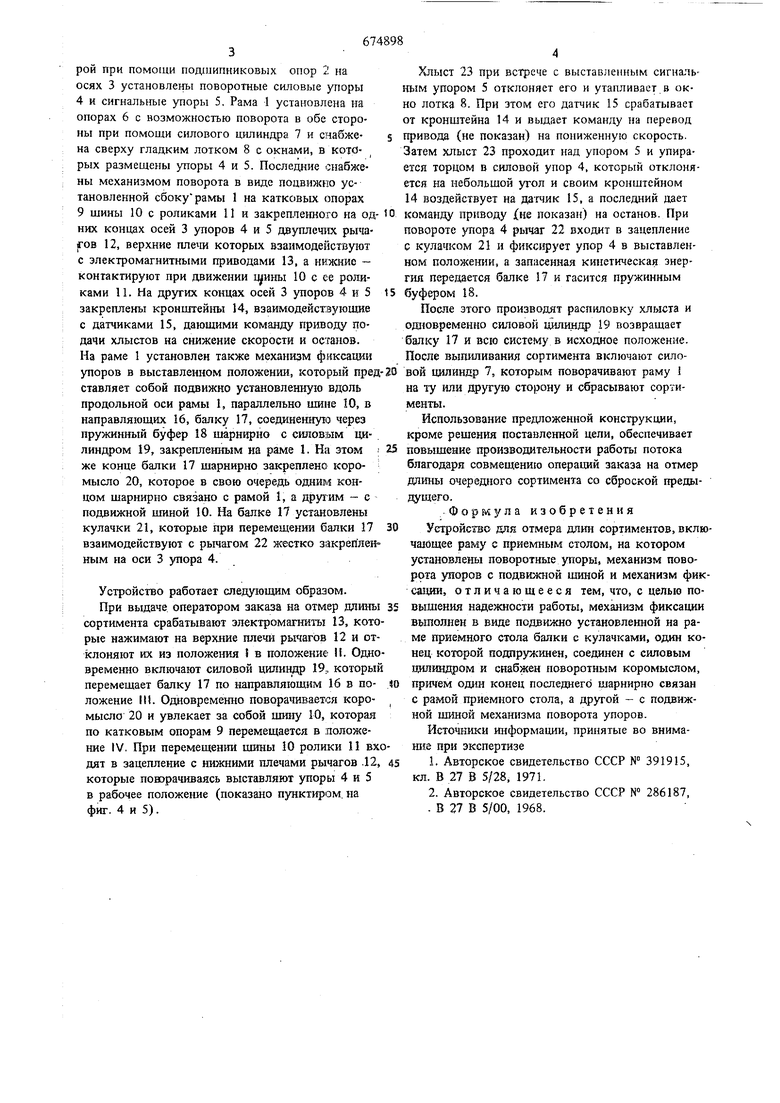
рой при помощи подшипниковых опор 2 на осях 3 установлены поворотные силовые упоры 4 и сигнальные упоры 5. Рама 1 установлена на опорах 6 с возможностью поворота в обе стороны при помощи силового цилиндра 7 и снабжена сверху гладким лотком 8 с окнами, в которых размещены упоры 4 и 5. Последние снабжены механизмом поворота в виде подвижно установленной сбоку рамы 1 на Катковых опорах 9 шины 10 с роликами 11 и закрепленного на од них концах осей 3 упоров 4 и 5 двуплечих рьпюfOB 12, верхние плечи которых взаимодействуют с электромагнитными приводами 13, а нижние контактируют при движении 10 с ее роли ками 11. На других концах осей 3 упоров 4 и 5 закреплены кронштейны 14, взаимодействующие с датчиками 15, дающими команду приводу подачи хльгстов на снижение скорости и бстайов. На раме 1 установлен также механизм фиксации упоров в выставленном положении который пред ставляет собой подвижно уетаирвлешую вдоль продольной оси рамы 1, параллельно шине 10, в направляющих 16, балку 17, соеданенную через пружинный буфер 18 ийрнкрно с сиповым цилиндром 19, закрепленным на раме 1. На этом же конце балки 17 шарнирно закреплено коромысло 20, которое в свою очередь Йднйм концом щарнирно связано с рамой 1, а. ;1ругшл - с подвижной шиной 10. На балке 17 установлены кулачки 21, которые при перемещении балки 17 взаимодействуют с рычагом 22 жестко закрейлей ным на оси 3 упора 4. Устройство работает следующим образЬм. При выдаче оператором sakas iia of мер длины сортимента срабатывают электромагшты 13, кото рые нажимают на верхние плечИ рычагов 12 и от клоняют их из положения I в положение И. Одао временно включают силовой цилищф 19, которы перемещает балку 17 по направляюищм 16 В положение 1М. Одновременно поворачивается коромысло 20 и увлекает за собой шипу 10, которая по Катковым опорам 9 перемещается в положение tV. При перемещений шины 10 ролики 11 BJf дят в зацепление с нижними плечалй рьщагов .12 которые поворачиваясь выставляют jmopbi 4 и 5 в рабочее положение (показано пунктиром, на фиг. 4 и 5).
674898 Хлыст 23 при встрече с выставленным сигнальным упором 5 отклоняет его и утапливает в окно лотка 8. При этом его датчик 15 срабатывает от кронштейна 14 и выдает команду на перевод привода (не показан) на пониженную скорость. Затем хлыст 23 проходит над упором 5 и упирается торцом в силовой упор 4, который отклоняется на небольшой угол и своим кронштейном 14 воздействует На датчик 15, а последний дает команду приводу (не показан) на останов. При повороте упора 4 рычаг 22 входит в зацепление С кулачком 21 и фиксирует упор 4 в выставленном положении, а запасенная кинетическая энергия передается балке 17 и гасится пружинным буфером 18. После этого производят распиловку хлыста и одновременно силовой цилиндр 19 возвращает балку 17 и всю систему, в исходаое положение. После выпипиванИя сортимента включают сило вой цилиндр 7, которым поворачивают раму I на ту или даугую сторону и сбрасывают сортиИспользование предложенной конструкции, кроме решения поставленной цели, обеспечивает повышение производительности работы потока благодаря совмещению операций заказа на отмер длины очередного сортимента со сброской предыдущего. Формула изобретения Устройство для отмера длин сортиментов, включающее раму с приемным столом, на котором установлены поворотные упоры, механизм поворота упоров с подвижной щиной и механизм фиксации, отличающееся тем, что, с целью повышения надежности работы, механизм фиксации вьшОлнен в виде подвижно установленной на раме приемного стола балки с кулачками, один конец которой подпружинен, соединен с силовым цилиндром и снабжен поворотным коромыслом, причем одщ конец последаегО шарнирно связан с рамой приемного стола, а другой - с подвижной шииой механизма поворота упоров. Источники информации, принятые во внимание приэкспертизе 1.Авторское свидетельство СССР № 391915, кл. В 27 В 5/28, 1971. 2.Авторское свидетельство СССР № 286187, - В 27 В 5/00, 1968.
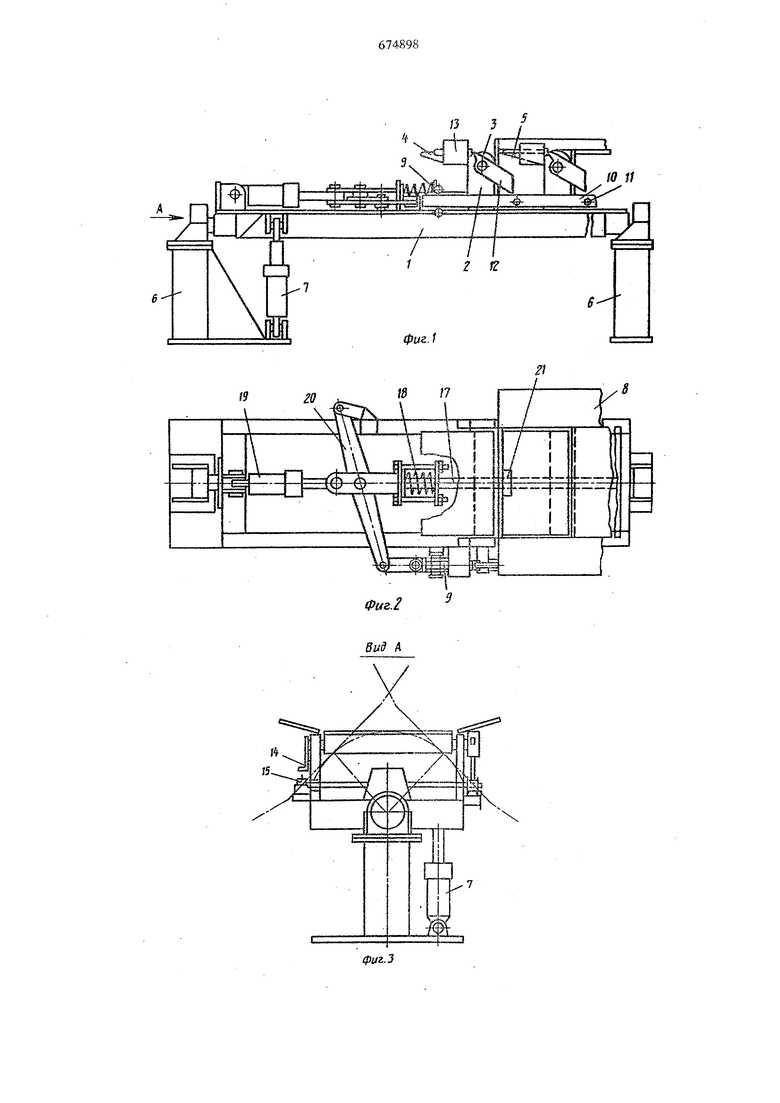
Фиг.

f
фиг-.З
16
г
L
