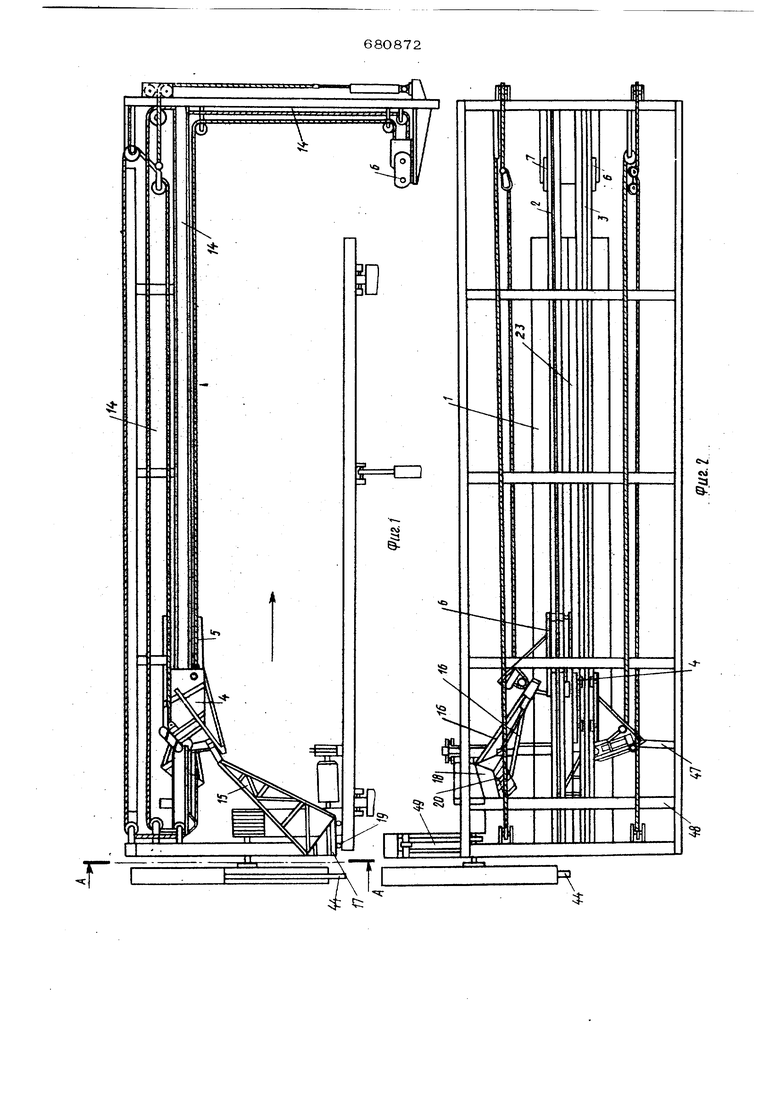
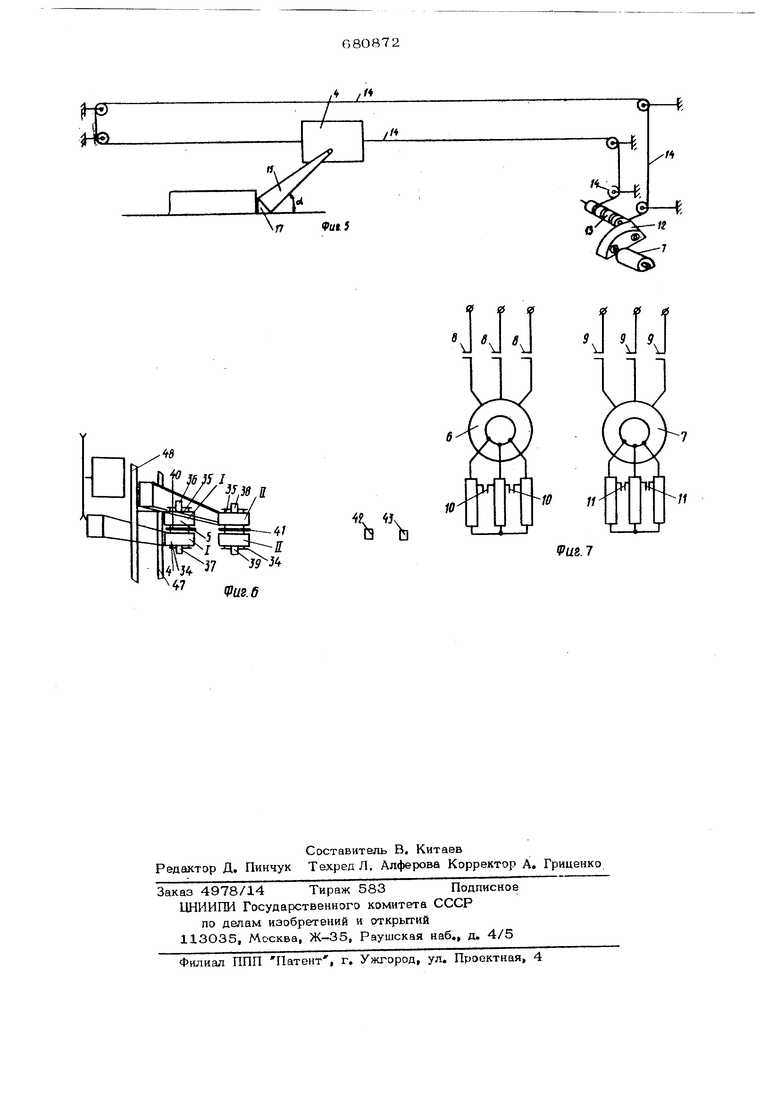
Изобретение относится к лесной промышленности и может быть с использовано при раскряжевке .хлыстов, Известно устройство для отмера длин сортиментов, включающее приемный стол и подвижный измерительный упор, жестко закрепленный на верхней ветви гибкого тягового органа и расположенный над приемным столом l . Известно также устройство для отме- ра длин сортиментов, включаюшэо приемный стол и механизм заказа длин, содер жащий .параллельные продольной оси прие ного стола направляющие, приводную каретку с шарнирно-закрепленными на ней измерительным упором и привод его поворота 2 . Недостатком таккх устройств является низкая производительность раскряжевки. Цель изобретения - повышение производительности раскряжевки. Это достигается тем, что уст 10йство снабжено дополнительным MOX-IHUOMOM за каза длин, причем направляющие основного и дополнительного маханизмов заказа длин расположены симметрично относительно продольной оси приемного стола. Кроме того,привод поворота каждого измерительного упора выполнен в виде гибкой тяги, огибающей блоки, один из которых соединен с силовым цилиндром. На фиг. 1 изображено устройство для отмера длин сортиментов при раскряжевке .хлыстов, вид сбоку; (на фиг. 2 - то же, вид свер.ху; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 показаны схемы индивидуальных приводов подъема и перемощения рычагов с упорами; на фиг. 5 привод поджима каретки с упором к ограничителю ее .хода и к тэрцу .хлыста} на фиг. 6 - исходные положения кареток, а также схема установки их датчиков; на фиг. 7 - силовая схема управления двигателями привода поджима упоров к .хлыс.ту, Предлагаемое устройство для отмора длин сортиментов при раскряжевке хлысfoB содержит гладкий приемный стол 1, над которым смонтированы направляющие 2 и 3, расположенные параллельно одна другой. На направляюши.х 2 и 3 подвижно установлены каретки 4 и 5, снабженные приводами их перемешения навстречу движению хлыста, которые состоят из двигателей 6 и 7 с фазным ротором, подключенным к сети пускателями 8 и 9 (нрзад), в цепи ротора которых включены сопротивления и шунтирующие их пускатели 10 и И. Передаточный механизм от двигателя 7 к каретке 4 состоит из редуктора 12 с барабаном 13 и трособлочной системы 14. На каретках 4 и 5 закреплены рычаги 15 и 16 измерительных упоров, которые сн&бжены основ- Hbnvt и дополнительньп - измерительными упорами 17 и 18, взаимодействующими с рабочей поверхностью стола посредством роликов 19 и 2О.
, Рычаги закреплены на каретках и посредством шарниров 21 и 22 под острым углом к поверхности приемного стола (фиг. 1) и выставлены навстречу движению хлыста. Для подъема и перемещения рычагов с измерительными упорами от продольной оси 23 приемного стола в противоположные стороны они снабжены индивидуальными приводами, состоящими из силовых цилиндров 24 и 25 для натяжки тросов 26 и 27 и подвижных блоков 28 и 29, соединенных основаниями ЗО и 31 рычагов 15 и 16 с помощью подвижных блоков 32 и 33. Каретки снабжены пластинами 34 и 35 для электрического включения индивидуальных для каждой каретки бесконтактных датчиков 36 и 37, а также 38 и 39, установленных в рабочих положениях 1 и исходных положениях Ц кареток при опущенных и подн$п-ь1к измерительных упорах. Кроме того, каретки снабжены пластинами 4О и 41 для электрического включения общах для кареток датчиков заданных позиций их останова,
. На фиг. 6 показана одна позиция останова кареток, заданная предварительным 42 и основным датчиками 43. В рабочем положении 1 каретки 4 и 5 фиксируются от перемещения к пиле 44 с помощью приливов 45 и 46 и поперечной балки 47. В положении И упоры 17 и 18 фиксируются от перемещения к пил поперечной балкой 48. Пила перемещается ципинцром 49.
Устройство имеет также автоматическую систему управления.
Работает устройство следующим образом.
Оператор в ручном режиме подводит хлыст к пиле для оторцовки. При этом силовые цилиндры 24 и 25 осущес1влякгг натяжение гибки.х тяговых органов трособлочных систем 26 и 27 через натяжные блоки 32 и 33. Упоры 17 и 18 подняты, пластины 34 и 35 находятся в дат- чиках 38 и 39, отключены пускатели 8 и 9 (назад), включены п| иводы поджима упоров к торцу хлыста. Упоры 17 и 18 находятся около поперечной балки 48. Оператор дает команду на оторцовку. При этом автоматически осуществляется логическая операция выбора: если обе каретки 4 и 5 находятся в положении j , то в работу включается упор 17 с кареткой 4. С вьщержкой времени, равной времени опускания упора ниже уровня ограничительной поперечной балки. 48, включается пускатель 9 привода перемещения упора 17 навстречу движения .хлыста и поджима упора. Двигатель 7 перемещает автоматически каретку 4 в рабочее положение 1 f при этом ее выступ 46 фиксируется поперечной балкой 47, к которой поджимается каретка 4 двигателем 7. Упор 17 вьютавляется в рабочее положение под острым углом навстречу движения хлыста на расстояние 2-3 см от полотна пилы 44. Пластина 34 взаимодей, ствует с датчиком 37, который отключает п скатель 11 роторной цепи двигателя 7... В его роторную цепь включаются сопротивления и в таком режиме он может при нулевых оборотах работать бесконечно долго, не перегреваясь и не выходя из строя. Одновременно с поворотом упора 17 в рабочее положение после заказа на оторцовку силовой цилиндр 49 осуществляет опускание пилы и операцию оторцовки до срабатывания конечного выключателя ее нижнего положения, после чего силовой цилиндр 49 поднимает пилу. Оператор оценивает качество торца хлыста и нажимает кнопку заказа. Привод механизма подачи осуществляет разгон .хлыста совместно с упором 17, который двигателем 7 продолжает поджиматься к его торцу. Пластина 4О воздействует вначале на датчик 42, дающий команду на снижение скорости привода механизма подачи, а затем на датчик 43, осуществляющий его отключение и надвигание пилы, затем включается пускатель 11, упор 17 и пи- ла 44 поднимаются. Каретка 4 с поднятым упором 17 двигатйлем 7 возвращается при выведенных его роторных со- npjOTHBneHHRx в исходное положение II, . До при.хода ее в исходное положение при подъеме пилы 44 оператор вновь оценивеет качество торца .хлыста и дает .заказ на следующий сортимент. При этом в исходном положении находится каретка 5, пластина 35 которой взаимодействует с датчиком 38. Упор 18 опускается и приходит в исходное положение Т к пиле одновременно с процессом сброски сортимента и подъема приемного стола. Когда приемный стол 1 возвращается после сброски сортимента в исходное положение, .хлыст вновь разгоняется маханнзVMOM подачи, но совместно с упором 18, и перемещается затем до заданной позици За это время в положение Д возвращается (при вьшеденных роторных сопротивлениях) каретка 4 с упором 17 и оператор может заказать длину очередного сортимента. После автоматической раскряжевки всего .тшыста оператор вновь вручную подводит очередной хлыст к пиле и дает Заказ на отордовку. За время перемещения в ручном режиме .хлыста до пилы в положение Д снова возвращаются обе ка ретки и после заказа осуществляется автоматический вътбор RX для поочередной работы. Затем повторяется процесс раскряжевки .хлыста. Формула изобретения 1.Устройство для отмера длин сортиментов при раскряжевке хлыстов, включающее приемный стол, расположенный над ним маханизм заказа длин, содержащий параллельные продольной оси приемного стола направляющие, приводную каретку с шарнирно-закрепленным на ней измерительным упором и nptiBOft его поворота, отличающееся тем, что, с целью повышения производительности раскряжевки, устройство снабжено дополнительным механизмом заказа длин, причем направл$пошие основного и дополнительного механизмов заказа длин расположены симметрично относ ггельно продольной оси приемного стола. 2.Устройство по п. 1, о т л и ч а ю3U е е с я тем, что привод поворота каждого измерительного упора выполнен в В1ще гибкой тяги, огибающей блоки, один из которых соединен с силовым цилиндром. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство № 286186, кл. В 27 В 5/ОО, 197О. 2.Torest 3ndtisiries lO, 1963, с. 104.
i8 21 f7,J( 1 ,J7
/7Фиг 5
ТГ:.::
Pf/8.ff
«
/f


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отмера длин сортиментов | 1979 |
|
SU907743A1 |
| Способ раскряжевки лесоматериалов и раскряжевочная установка | 1987 |
|
SU1530444A1 |
| Устройство для отмера длин сортиментов | 1979 |
|
SU1046088A1 |
| Устройство для отмера длин сортиментов | 1979 |
|
SU893520A1 |
| Устройство для отмера длин сортиментов | 1978 |
|
SU745677A1 |
| Устройство для отмера длин сортиментов | 1979 |
|
SU783004A1 |
| Устройство для отмера длин сортиментов | 1977 |
|
SU683905A1 |
| Устройство для подачи и точного останова хлыстов раскряжовочной установки | 1980 |
|
SU919867A1 |
| СПОСОБ ОТМЕРА ДЛИН СОРТИМЕНТОВ ПРИ РАСКРЯЖЕВКЕ ХЛЫСТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2005591C1 |
| Устройство для отмера длин сортиментов | 1978 |
|
SU783002A1 |