Изобретение относится к области автоматизации технологических процессов в условиях серийного производства и может быть применено для управления процессом непрерывного автоматического ориентирования разнотипных деталей при механической сборке или обработке.
Известно устройство для определения положения деталей, содержащее матрицу с последовательно включенными рядами фотодвухполосников, соединенных в каждом ряду между собой параллельно, и резисторы различной величины, подключенные последовательно к фотодвухполюсникам ряда, причем каждый ряд зашунтирован неодинаковными по величине резисторами 1.
Недостатком этого устройства является низкая точность.
Из известных решений наиболее близКИМ к изобретению по технической сущности и достигаемому результату является устройство для управления непрерывной ориентацией разнотипных деталей, содержащее блок определения положения детали, выполненный на датчиках с реле на выходе каждого из них, анализирующий блок, выполненный на диодной матрице,, и исполнительный блок, включающий в себя пороговые элементы 2.
Недостатком известного решения является невысокая точность ориентации разнотипных деталей широкой номенклатуры при их непрерывном ориентировании.
Цель изобретения - повышение точности ориентации.
Указанная цель достигается тем, что один из контактов реле датчиков, образу ющих каждый вертикальный ряд блока определения положения детали, соединены через диоды и нагрузочные резисторы матрицы анализирующего блока с соответствующими группами соединенных попарно других контактов тех же реле, причем выход анализирующего блока соединен с входами пороговых элементов исполнительного блока через другие группы соединенных попарно контактов тех же реле.
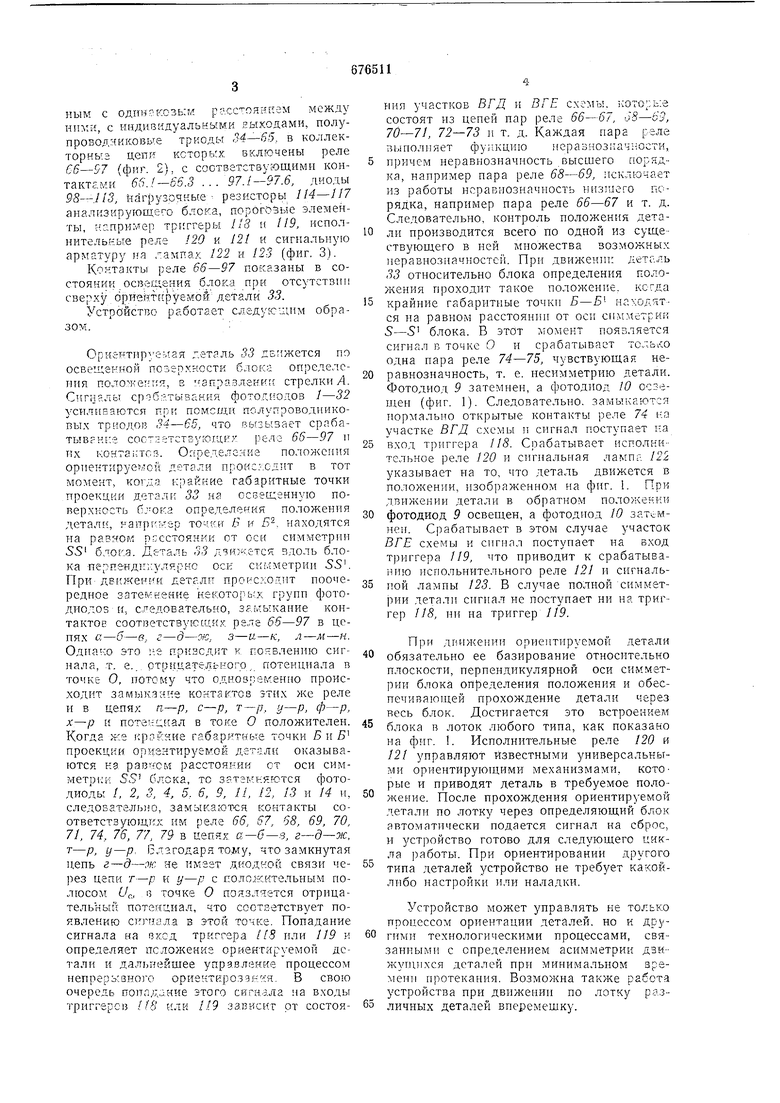
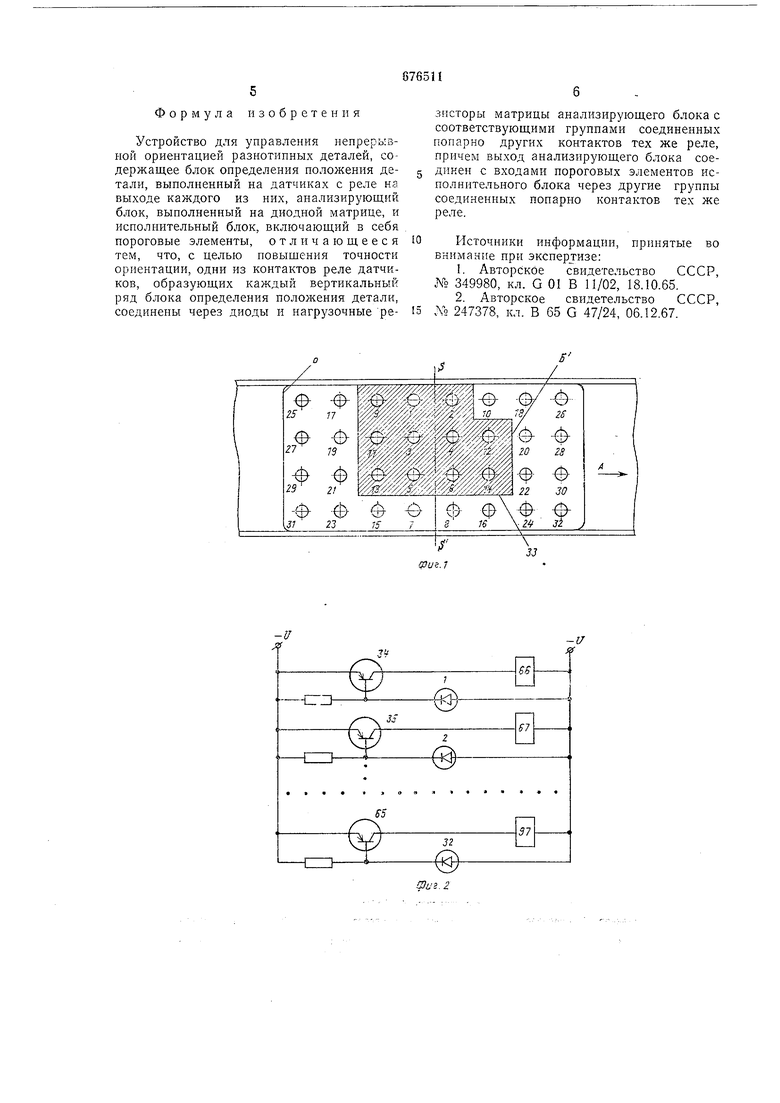
На фиг. 1 показано расположение фотоэлементов блока определения положения деталей и его положение на лотке; на фиг. 2 - схема усилителя сигнала для срабатывания реле; на фиг. 3 - принципиальная схема предлагаемого устройства.
Устройство содержит блок определения положения деталей, состоящий из датчиков, например, фотодиодов 1-32, расположенных во взаимно параллельных рядах, перпендикулярных движению детали 33, причем количество их должно быть четным с од1Ш козь:м р-сстоякЕгем между ними, с индивидуальными Еыходами, полупроводниковые триоды 34-65: в коллектор кьэ цепи которых включены реле (фиг. 2), с соответствующими контактгми 66.-66.3 ... 97.1-97.6, диоды 98-ЛЗ, нагрузочные- резисторы 114-117 анализирующего блока, пороговые элементы, например триггеры 118 и 119, исполнительные реле 120 к 121 и сигнальную арматуру ия лампах 122 и 123 (фиг. 3).
Контакты реле 66-97 показаны в состоянии освегдения блока при отсутствии сверху ориейтгфуемой детали 33.
Устройство работает следующим образом.
Ориентируемая деталь 33 движется ио осве1ценно 1 позерхностк блока определения положения, в иапразлек и стрелки/1. Сигналы сроб;-;тывакия фотодЕЮДОВ 1-32 усиливаются при помсгди полупроводниковых триодо 5 34-65, что вызывает срабатыврНЕ/э состэетствуюидих |)елз 66-97 и их кок7а.:тг;в. Определение положения opneHTHpyevvroK детали прокс: одпт в тот момент, когда крайние габаритные точки проекции детал т 33 на освещенную поверхность fijOKa определения положения детали:, рапркмер точки Б и Б. находятся иа равном расстоянии от оси симметрии SS блока. Деталь 33 движется адоль блока перп&нди;:улярно оси симметрии SS. При- дв ;жеиик детали прокслодит поочередное затемеение некоторь;х групп фотодиодов и, следовательно, замыкание контактов соответствующих реле 66-97 в цепях и-б-в, г-д-ок, 3-и-к, л-Л1-н. Однако это .е приводит к появлению сигнала, т. е. стр 1цате.лы-тогр, потенциала в точке О, потому что одновременно происходит замыкание контактов этих же реле и в цепях п-р, с-р, т-/7, у-р, ф-р, X-р и потенциал в токе О положителен. Когда же кроккие габаритные точки Б и проекции ориентируемой детали оказываются на равном расстоянии от оси симметр1;и 5S блока, то затемняются фотодиоды /, 2, 3, 4, 5, 6, 9, и, 12, 13 и 14 и, следовательно, замыкают-ся контакты соответствующих им реле 66, 67, 68, 69, 70, 71, 74, 76, 77, 79 в цепях а-б-з, г-д-ж, т-р, у-р. Благодаря тому, что замкнутая и,епь г-д-ж яе имеет диодной связи цепи г-р к у-,7 с положктельиым иолюсом t/f,, 13 точке О появляется отрицательный потенциал, что соответствует появлению сигнала з этой точке. Попадание сигнала на вход триггера /75 или 119 и определяет положение ориентируемой детали и дальнейшее управление процессом Henjiepa-BHoro ориенткрозэн :я. В свою очередь попадание этого сигнала на входы триггеров US или //9 зависит от состояния участков ВГД и ВГЕ схемы, );оторь;е состоят из цеией пар реле 66-67, oS-69, 70-7J, 72-73 н т. д. Каждая пара реле выполняет фу;1кцию неравнозначности, причем неравнозначность высшего порядка, например пара реле 68-69, исключает из работы неравнозначность порядка, например пара реле 66-67 и т. д. Следовательно, контроль положения детали производится всего по одной из существующего в ней множества возможных иеравиозначностей. Прн движении деталь 33 относительно блока определения положения проходит такое положение, ког.да
крайние габаритные точки Б-Б- находятся на равном расстоянии от оси симметрии 5-uS блока. В этот люмент лоязляется сигнал в точке О и срабатывает тольло одна нара реле 74-75, чувствующая неравнозначность, т. е. несимметрию детали. Фотодиод 9 затемнен, а фотодиод 10 освещен (фиг. 1). Следовательно, замыкаются иорлтально открытые контакты реле 74 на участке ВГД схемы и снгнал поступает н.а
вход триггера 118. Срабатывает исполнительное реле 120 и сигнальиая лампа 122 указывает на то, что деталь движется в положении, нзображениом на фиг. 1. При движении детали в обратном положении
фотодиод 9 освещен, а фотодиод 10 зат миен. Срабатывает в этом случае участок ВГЕ схемы и сигнал поступает на вход триггера 119, что приводит к срабатыванию испольнительного реле 121 н сигнальпой ламиы /25. В случае полной симметрии детали сигнал не поступает ни на триггер , ни на триггер 119.
При движении ориентируемой детали
обязательио ее базирование относительно плоскости, перпендикулярной оси симметрии блока определения положения и обеспечиваю1цей прохождение детали через весь блок. Достигается это встроением
блока в лоток любого тина, как показано иа фиг. 1. Исполнительные реле 120 и 12 управляют известными универсальными ориентирующими механизмами, которые и приводят деталь в требуемое положенне. После прохождения ориентируемой детали по лотку через определяющий блок автоматически подается сигнал на сброс, и устройство готово для следующего цикла работы. При ориентировании другого
типа деталей устройство не требует какойлибо настройки или иаладки.
Устройство может управлять не только процессом ориентации деталей, но и другими технологическими процессами, связаннымн с определением асимметрии дзижуии1хся деталей при минимальном времени иротекаиня. Возможна также работа устройства при движении по лотку различных деталей вперемешку.
Формула изобретения
Устройство для управления иепрерь выой ориентацией разнотипных деталей, содержащее блок онределения положения детали, выполненный на датчиках с реле из выходе каждого из них, анализирующий блок, выполненный на диодной матрице, и исполнительный блок, включающий в себя пороговые элементы, отличающееся тем, что, с целью иовышения точности ориентации, одни из контактов реле датчиков, образующих каждый вертикальный ряд блока определения положения детали, соединены через диоды и нагрузочные резисторы матрицы анализирующего блока с соответствующими группами соединенных попарно других контактов тех же реле, причем выход анализирующего блока соединен с входами пороговых элементов исполнительного блока через другие группы соединенных попарно контактов тех же реле.
Источники информации,
принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 349980, кл. G 01 В 11/02, 18.10.65.
2.Авторское свидетельство СССР, До 247378, кл. В 65 G 47/24, 06.12.67.
JJ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления положением исполнительного механизма | 1977 |
|
SU623181A1 |
| Устройство для определения положения деталей | 1975 |
|
SU653507A1 |
| Определяющий адаптивный модуль | 1986 |
|
SU1427177A1 |
| Фотоэлектронное определяющее устройство | 1982 |
|
SU1068703A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ДЕТАЛЕЙ ПРИ ИХ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ | 1968 |
|
SU217907A1 |
| Ориентирующее устройство | 1976 |
|
SU591305A1 |
| Устройство опроса объектов измерения и сигнализации | 1988 |
|
SU1536419A1 |
| Система для управления робототехнологическим комплексом | 1987 |
|
SU1413599A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ ОТ НЕПОЛНОФАЗНЫХ РЕЖИМОВ И ПЕРЕГРУЗКИ | 2005 |
|
RU2294586C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ТРЕХФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ ОТ АСИММЕТРИЧНОГО РЕЖИМА СЕТИ | 1996 |
|
RU2115988C1 |
-1
i
f7
32
1--L
Г
-е
П8
.Ti:
-в
115
о
