1
Изобретение относится к приборостроению и машиностроению и может быть применено для автоматического ориентирования разнотипных деталей в условиях миогонтавенклатурного производства.
Известно устройство для автоматической ориентации детгилей, содержащее контрольную плсхцадку, вьшолненную поворотной относительно вертикальной оси и установленную ва ос новаиии, укрепленном на перпендикулярных направляющих l.
Поворот обеспечивается тремя электродвигателями с редукторами.
Однако в даннсм устройстве можно ориентировать детали, преимущественно плоские, в одяоЛ плоскости.
Цель изобретения - обеспечение ориентирования деталей широкой номенклатуры в двух взаи1ишо перпендикулярных плоскостях.
Для этого контрольная плседадка установлена с возможностью независимого подъема в вертикальном направлении и выполнена в виде закреплсинн по ее оси поворота коаксиально друг другу полого вала и направляющей втулки, связанных между собой посредством шпоночного соединения и с приводом поворота - соответственно через винтовое соединение и электромагнитный ТОСФ4ОЗ. Причем устройство снабже- но парными агисватами, установленными над контрольной площадкой с возможностью одновременного перемещения к ее центру и их поворота вокруг горизонтальной оси.
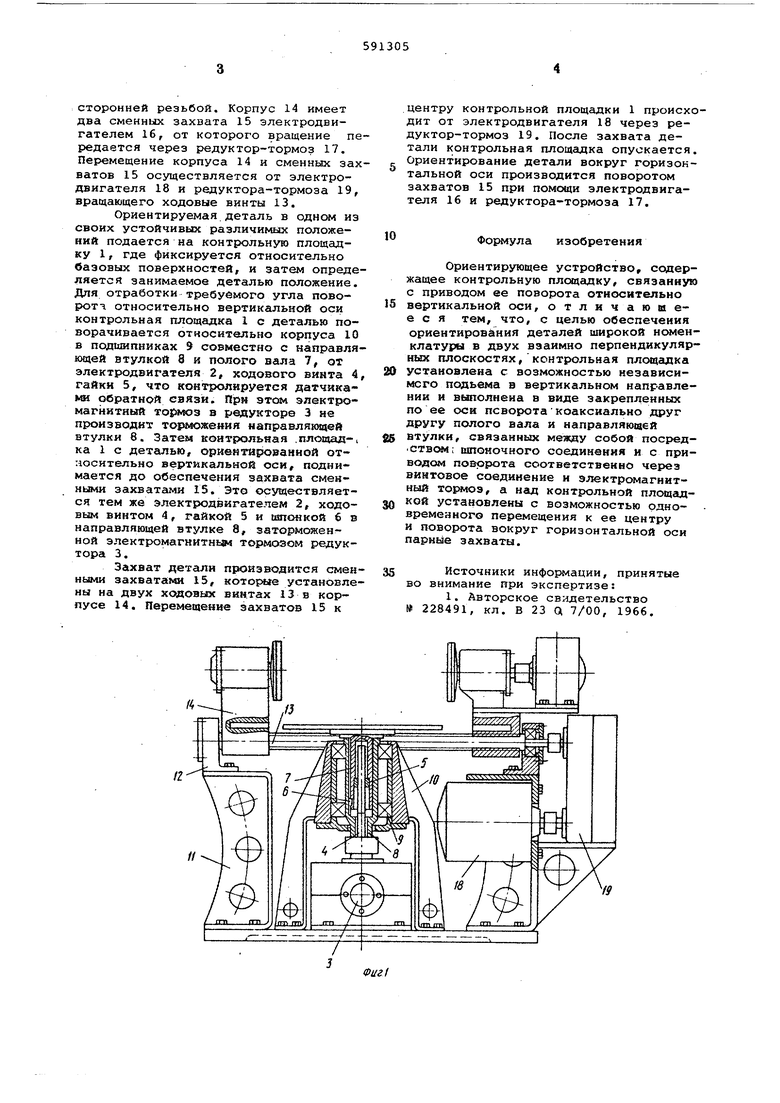
На фиг. 1 изображено предлагаемое устройство, вид сбоку; на фиг. 2 то же, вид сверху.
Устройство содержит контрольную площадку 1, для поворота и подъема которой ИМЕЮТСЯ мгшогабаритный электродвигатель 2 и редуктор 3, в котором расположены собственно редуктор, электромагнитный тормоз и датчики обратной связи, вьщающие сигналы при повороте или подъема выходного вала.
Движение подъема осуществляется пРК помощи ходового винта 4, гайкя 5 и направлякзщей ошонки 6. Винт 4 расположен внутри полого вала 7, который жесткб соединен с площадкой 1 и имвет возможность вращения совместно с направлякяцей втулкой 8 в подшипниках 9 относительно корпуса 10.
На стойках 11 в опорах 12 расположены два ходовых винта 13, выполнанных до половины с право- и левосторонней резьбой. Корпус 14 имеет два сменных захвата 15 электродвигателем 16, от которого вращение передается через редуктор-тормоз 17. Перемещение корпуса 14 и сменных захватов 15 осуществляется от электродвигателя 18 и редуктора-тормоза 19, вращающего ходовые винты 13,
Ориентируемая деталь в одном из своих устойчивых различимых положений подается на контрольную площадку 1 , где фиксируется относительно базовых поверхностей, и затем определяется занимаемое деталью положение. Для отработки требуемого угла поворот i относительно вертикальной оси контрольная площадка 1 с деталью поворачивается относительно корпуса 10 в подшипниках 9 совместно с направляющей втулкой 8 и полого вала 7, от электродвигателя 2, ходового винта 4 гайки 5, что контролируется датчиками обратной еэязи. При этом электромагнитный тормоз в редукторе 3 не производит торможения направляющей втулки 8. Затем контрольная .площадка 1 с деталью, ориентированной относительно вертикальной оси поднимается до обеспечения захвата сменными захватами 15. Это осуществляется тем же электродвигателем 2, ходовым винтом 4, гайкой 5 и шпонкой 6 в направляющей втулке 8, заторможенной злектромагнитнья тормозом редуктора 3.
Захват детали производится сменными захватами 15, которые установлены на двух ходовых винтах 13 в корпусе 14. Перемещение захватов 15 к
центру контрольной площадки 1 происходит от электродвигателя 18 через редуктор-тормоз 19. После захвата детали контрольная площадка опускается. Ориентирование детали вокруг горизонтальной оси производится поворотом захватов 15 при помощи злектродвигателя 16 и редуктора-тормоза 17.
Формула изобретения
Ориентирующее устройство, содержащее контрольную площадку, связанную с приводом ее поворота относительно вертикальной оси, отличаювв ее с я тем, что, с целью обеспечения ориентирования деталей широкой нсменклатуры в двух взаимно перпендикулярных плоскостях, контрольная площадка установлена с возможностью независимого подьема в вертикальном направлении и выполнена в виде закрепленных по ее оси поворотакоаксиально друг другу полого вала и направляющей втулки, связанных между собой посредствсж; шпоночного соединения и с приводом поворота соответственно через винтовое соединение и электромагнитный тормоз, а над контрольной площадкой установлены с возможностью одновременного перемещения к ее центру и поворота вокруг горизонтальной оси парные захваты.
35 Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство № 228491, кл. В 23 а 7/00, 1966.
49
Фиг
Фиг2
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
| Автооператор | 1965 |
|
SU674865A1 |
| Стенд для слесарно-доводочных работ | 1989 |
|
SU1660804A1 |
| Манипулятор | 1987 |
|
SU1657369A1 |
| Устройство для поштучной выдачи плоских деталей с отверстиями | 1989 |
|
SU1708478A1 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| ПРЕССОВЫЙ АГРЕГАТ | 1990 |
|
RU2043815C1 |
| Устройство для сборки запрессовкой деталей типа вал-втулка | 1986 |
|
SU1333527A1 |
| Штамповочный комплекс | 1988 |
|
SU1609537A1 |

