портного средства, к выходу которого подключен один из входов блока задания режимов перемещения, другой вход которого соединен с одним из выходов датчика обнаружения люка, соединенного другим выходом с одним из входо блока управления продольным перемещением труб, к другому входу которого подключен один из выходов блока задания режимов перемещения, другие выходы которого соединены с входами блоков управления поперечным перемещением труб и их выдвижением, имеющих с {блоком задания режимов перемещения обратную связь.
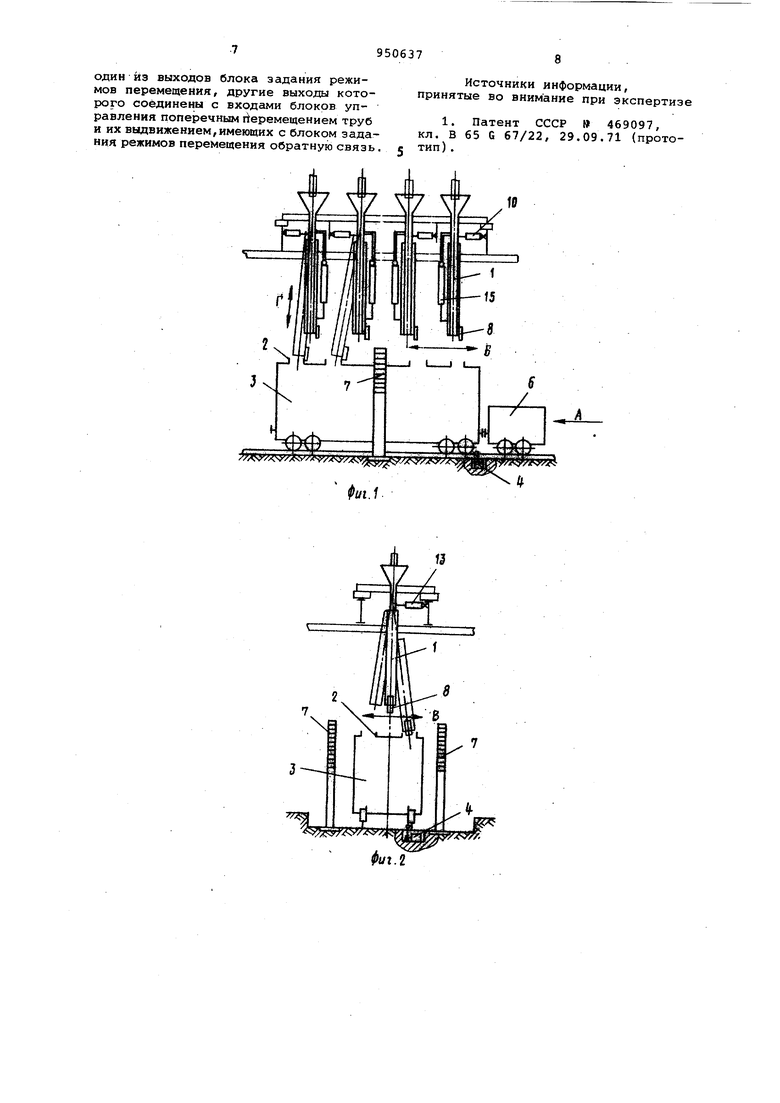
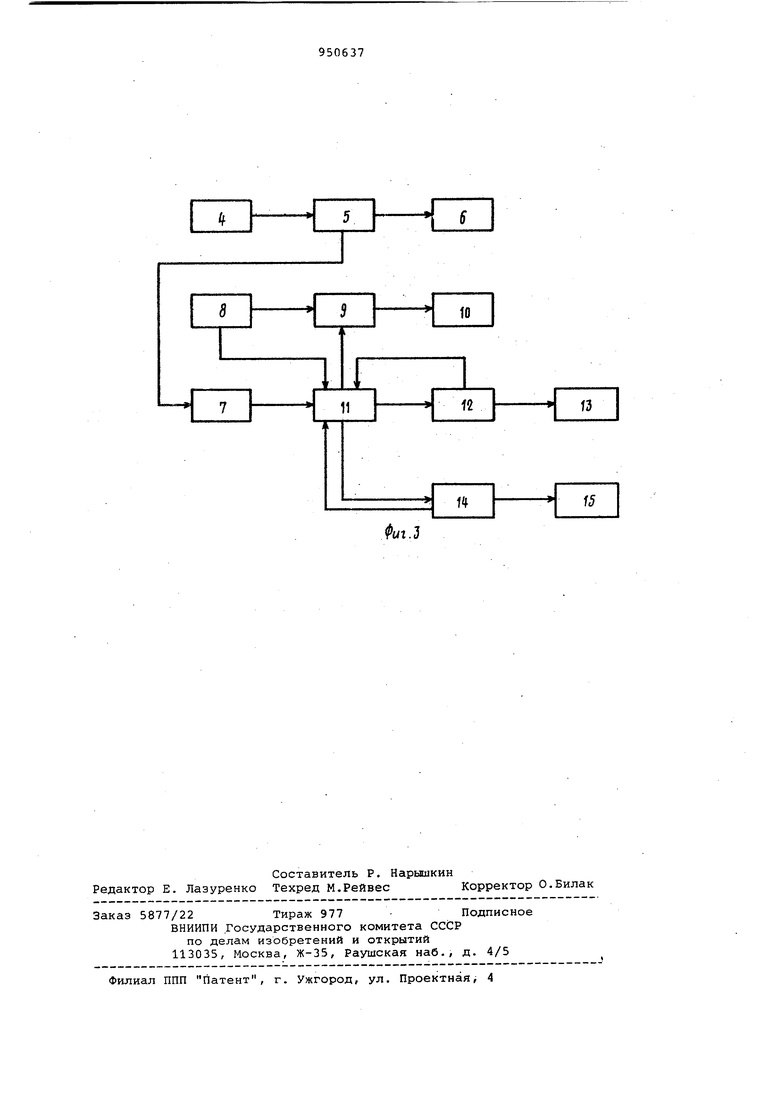
На фиг. 1 изображено устройство, вид спередиf на фиг. 2 - то же,вид сбоку; на фиг. 3 - функциональная схема автоматической части устройства управления.
Устройство для управления загрузкой материалов с помощью телескопических (подъемно-опускных загрузочных) -труб 1 в люки 2 транспортных средств, например вагонов 3, состоит из датчика 4 остановки транспортного средства, в частности вагона 3, выполненного, например в виде конечного выключателя, и соединенного через блоки 5 управления перемещением, состоящий, например из комплекта, содержащего автоматический выключатель, магнитный пускатель и логическое устройство, например реле времени, с приводом б перемещения вагона 3 в направлении по стрелке А, блока 7 определения типа транспортного средства (вагона), выполненного, например в виде многопозиционного переключателя на основе фотореле с установленными на разной высоте ступенями и соединенного на входе с блоком 5 управления перемётдением транспортного средства (вагона 3), датчика 8 обнаружения люка, например, бесконтактного типа, выполненного с применением акустических или иных приборов или контактного типа, с применением, например, приборов контроля сопротивлений, наличия материала или конечных выключателей,соединенного с блоком 9 управления продольным перемещением трубы, соединенным с приводом 10 (по стрелке Б).Датчики контактного типа могут быть снабжены, например, эластичными элек рическими щупами, блока 11 задания режимов перемещения телескопических труб, соединенного на входе с датчиком 8 обнаружения люка и с блоком 7 определения типа, на выходе - с блоком 9 управления, с блоком 12 управления поперечным перемещением труб .(по стрелкам В), соединенным с приводом 13, и с блоком 14 управления выдвижения труб (подъема-опускания) по стрелкам Г, соединенным с приводом 15. Блоки 12 и 14 имеют обратную
связь с блоком 11, предназначенным для преобразования сигналов, поступающих от блока 7 определения типа и датчика 8 обнаружения люков в сигналы управления блоками 9, 12 и 14, приводами 10 и 13 продольных и поперечных перемещений телескопических труб и приводом 15 их выдвижения (подъема-опускания). Блок 11, может быть выполнен в виде комплекта лохических релейных или транзисторных элементов.
Принцип работы устройства основан
на том, что после остановки вагона 3
;В зоне загрузки и включения приводов
10от блоков 9 управления через блок
11задания режимов перемещений и блок 7 определения типа вагона по сигналу блоков 5 управления, датчики 8, перемещаясь вместе с трубами вдоль
.пути вагона в направлении по стрелке Б, осуществляют поиск люков и после обнаружения их передают информацию об этом блокам 9, останавливающим приводы 10, обеспечивая тем самым точное наведение труб на люки в автоматическом режиме . Неточность положения вагона в зоне загрузки, останавливаемого приводом б по сигналу датчика 4 остановки вагона, передаваемому через блок 5 управления, и вызванная этим необходимость обнаружения люков определяется рядом факторов, влияющих на длин остаточного тормозного пути, в частности, состоянием рельс, весом вагонов. их типов и др. При необходимости наведения труб на люки с заданным взаиморасположением в поперечном пути.вагона направлении сигнал от блока 5 управления подается на блок 9 управления приводом
10переметения труб вдоль пути последовательно через блок 7 определения типа вагоца и блок 11 задания режимов перемещений телескопических труб,логическое устройство которого в первую очередь направляет программный сигнал управления, соответствующий заданному блоком 7 расположению люков поперек пути, через блок 12 приводу 13, информацию об отработке заданного перемещения, которым поперек пути блок 12 управления направляет блоку 11, после чего логическое устройство которого подает командный сигнал преобразования на блок 9 управления приводом 10, обеспечивая его включение. При использовании датчика 8 контактного типа логическое устройство блок
11преобразования сигналов в первую очередь подает команду через блок 14 управления приводу 15 на опускание телескопических труб до уровня, соответствующего установлению контакта датчика 8 с поверхностью вагона, и после поступления сигнала от него
об этом блоку 11 последний выдает командный сигнал блоку 14 на остановку привода 15, после чего по его же сигналу блок 11 подает командный сигнал блоку 9 на включение привода 10.
При поступлении вагонов с заданным расположением люков блок 11 выдает командные программные сигналы приваду 15 на отработку величины опускания телескопических труб, соответствующей определенному блоком 7 типу вагона.
Таким образом, устройство позволяет производить автоматическое наведение труб и применительно к вагонам с заданным расположением люков поперек пути движения вагонов, и применительно к вагонам с любым расположением люков вдоль пути, т.е. обладает свойством универсальности использования .
Устройство работает следующим образом.
При поступлении вагона 3 с заданным взаиморасположением люков в зону загрузки в направлении стрелки А его элемент, например колесо, своей ребордой воздействует на датчик 4, от которого через блок 5 подается сигнал на остановку приводу б перемещения (движения) вагона. Логическое устройство блока 6, например реле времени, .запрограммированное на включение по прошествии по времени вагоном тормозного пути, заведомо большего,чем время остановочного пути, включает , блок. 7 определения типа вагона,от которого через блок 11 - при установлении блоком 7 типа вагона - подаются командные программные сигналы приводам 13 перемещений труб поперек пути через блок 12 управления и приводу 15 опускания труб 1 через блок 14 управления. Блоки 12 и 14 управления передают информацию об отработке приводами 13 и 15 заданных перемещений блоку 11 задания режимов перемещений телескопических труб, после чего его логическое устройство выдает командный сигнал блоку 9 управления на включение привода 10 перемещения труб вдоль пути. Датчики 8, установленные на перемещаемых труба.х 1, .осуществляют поиск люков и, обнаружив их, сигнализируют об этом блокам 9 управления, которые останавливают приводы 10, обеспечив тем самым наведение труб на люки.
При поступлении вагона, не имеющего заданного расположения люков, блок 11 подает команды непосредственно блоку 9 на включение приводов 10, минуя блоки 12 и 14. При установке в последнем случае в качестве датчика 8 обнаружения датчика контактного типа логическое устройство блока 11 в первую очередь подает сигнал приводу 15 выдвижения труб через блок 14 управления, и после отработки перемещения до момента контакта датчика 8 с поверхностью вагона последНИИ подает сигнал блоку 11, который отключает привод 15 через блок 14 и включает привод 10 перемещений труб вдоль пути через блок 9 управления.
В качестве блоков 7 определения типа вагона могут быть использованы блоки иного принципа действия, например, на основе гамма- реле или контактного типа.
Предлагаемое устройство позволяет сократить время основной операции в комплексе загрузочных работ - наведения телескопических труб на люки,как угодно расположенные вдоль пути движения вагона, путем автоматизации процесса обнаружения их местоположения применительно к вагонам разных типоразмеров, обеспечивая при этом возможность автоматического программного наведения труб на люки по заданному их взаиморасположению поперек пути.
Экономическая эффективность и целесообразность практического применения устройства определяется сокращением времени загрузки материалов в транспортные, средства, в широком диапазоне их типоразмеров, универсальностью его применения, повышением производительности всего загрузочного комплекса, ликвидацией ручного управления и снижением себестоимости загружаемых материалов и продуктов .
Формула изобретения
Устройство, для управления загрузкой материалов в крытые.транспортные средства через люки с. помощью телескопических труб, содержащее блоки управления продольным и поперечным перемещениями телескопических труб и их выдвижением и блок управления перемещением транспортного средства, соединенные выходами с соответствующими приводами, отличаю щ ее с я тем, что, с целью сокращения времени загрузки транспортных средств с любым расположением люков, оно снабжено датчиком обнаружения люков, установленным на телескопической трубе, блоками определения типа транспортного средства и задания режимов перемещения телескопических труб и датчиком остановки транспортного средства, соединенным с входом блока управления его перемещением, выход которого соединен с входом блока опре1деления-типа транспортного средства, к выходу которого подключен один из входов блока задания режимов перемещения, другой вход которого соединен с одним из выходов датчика обнаружения люка, соединенного другим пыходом с одним из входов блока управления продольным перемещением труб, к
5 другому входу которого подключен один из выходов блока задания режимов перемещения, другие выходы которого соединены с входами блоков управления поперечным Перемещением труб и их выдвижением,имеющих с блоком задания режимов перемещения обратную связь. с
tfl Источники информации, принятые во внимание при экспертизе 1. Патент СССР № 469097, кл. В 65 G 67/22, 29.09.71 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления загрузкой материалов в крытые транспортные средства через люки с помощью телескопических труб | 1978 |
|
SU950638A1 |
| Устройство управления загрузкой сыпучих материалов в транспортные средства с помощью телескопических труб | 1977 |
|
SU676520A1 |
| МАНИПУЛЯТОР ДЛЯ ОЧИСТКИ ВАГОНОВ | 1987 |
|
RU2028226C1 |
| МАНИПУЛЯТОР ДЛЯ ОЧИСТКИ ВАГОНОВ С ДВУХСКАТНЫМ ПОЛОМ | 1989 |
|
RU2026215C1 |
| ПРОГРАММНОЕ УСТРОЙСТВО ОЧЕРЕДНОСТИ ОБСЛУЖИВАНИЯ КОКСОВЫХ ПЕЧЕЙ И ЗАТВОРОВ УГОЛЬНОЙ БАШНИ | 1972 |
|
SU360358A1 |
| МАШИНА ДЛЯ ЗАГРУЗКИ, ТРАНСПОРТИРОВКИ И БОКОВОЙ РАЗДАЧИ СЫПУЧЕГО СЫРЬЯ В ЭЛЕКТРОЛИЗЕРЫ ДЛЯ ПОЛУЧЕНИЯ АЛЮМИНИЯ | 2018 |
|
RU2690554C1 |
| АВТОМАТИЧЕСКИЙ ПОГРУЗО-РАЗГРУЗОЧНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2018 |
|
RU2689080C1 |
| Роботизированная установка пожаротушения мобильная на базе роботов в трубопроводах | 2022 |
|
RU2785414C1 |
| Система выявления немагнитных материалов, регистрации и контроля выгрузки металлолома из железнодорожных вагонов | 2020 |
|
RU2726576C1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU361190A1 |
fj
/
уг.2
