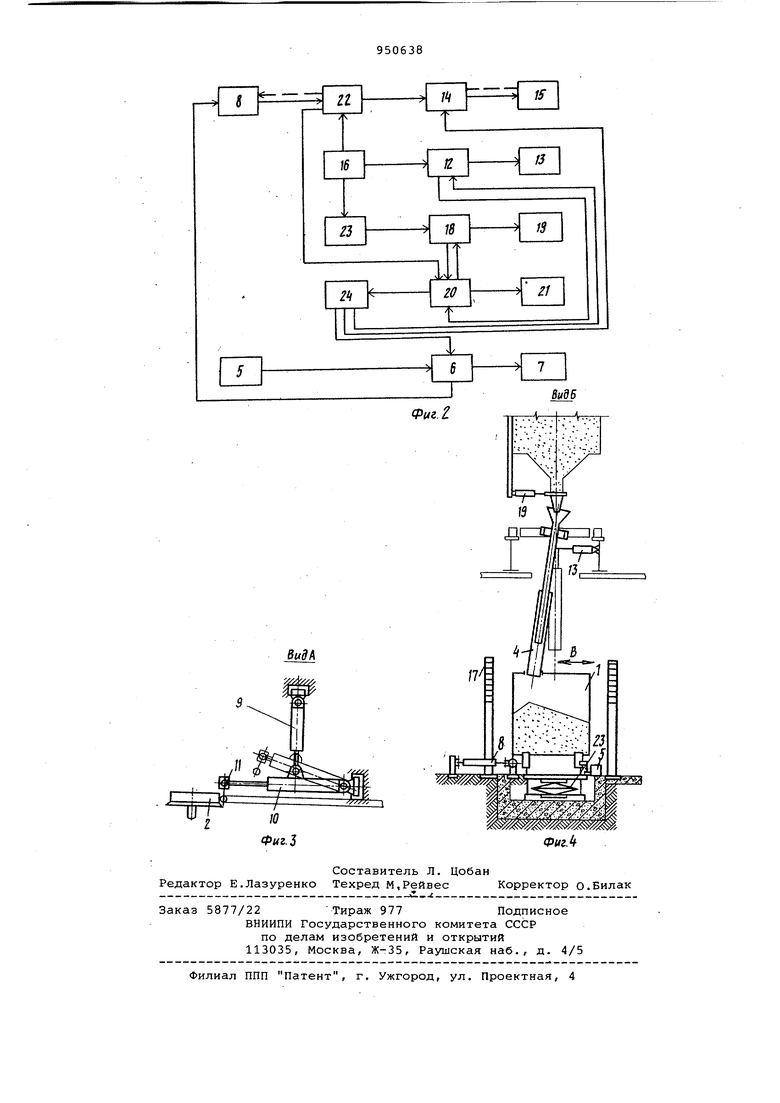
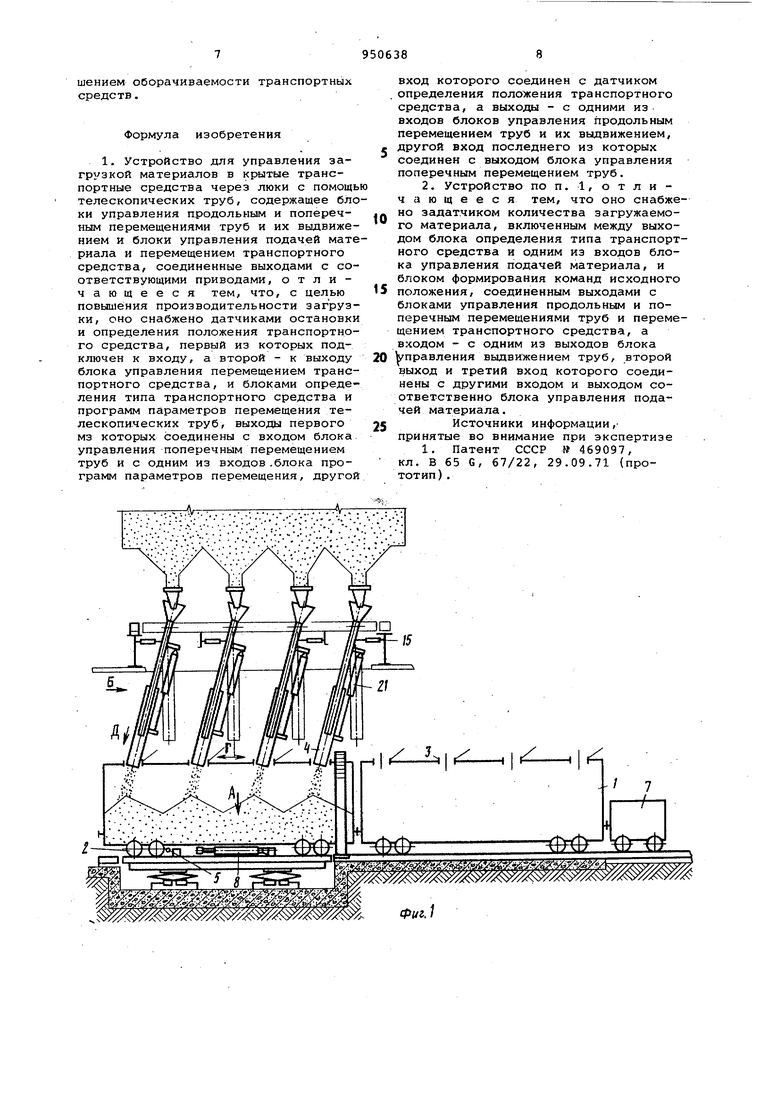
ным перемещением труб и их выдвижением, другой вход последнего из кото рых соединен с выходом блока управле ния поперечным перемещением труб, Кроме того, устройство снабжено задатчиком количества загружаемого материала, включeнньuvl между выходом блока определения типа транспортного средства и одним из входов блока управлрния подачей материала, блоком формирования команд исходного положе ния, соединенным выходами с блоками управления продольным и поперечным перемещениями телескопических труб, И перемещением транспортного средства, а входом - с одним из выходов блока управления выдвижением труб, второй выход и третий вход которого соединены с другими соответственно входом и выходом блока управления подачей материала. На фиг. 1 изображено устройство, общий вид, а на фиг. 2 - функциональная схема автоматической части устрой ства; на фиг. 3 - вид А фиг. 1; на фиг. 4 - вид Б фиг. 1. Устройство для управления загруз кой материалов в крытые транспортные средства 1, имеющие базовые элементы например колеса 2, через его люки 3 с помощью телескопических труб 4 состоит из датчика 5 остановки транспорт ного средства, выполненного, например, в виде конечного выключателя и соединенного через блок 6 управления перемещением транспортного средства, состоящий, например, из комплекта, содержащего автоматический выключатель, магнитный пускатель и логическое устройство, например, реле времени, с приводом 7 перемещения транспортного средства; датчика 8 определения положения транспортного средст ва, выполненного, например (фиг. 3)г в виде двух приводных исполнительных механизмов 9 и 10, с установленным на одном из них ограничителем 11 кода, например, в виде конечного выклю чателя, с возможностью его перемеще ния в зону движения транспортного средства вдоль его пути до встречи с базовым элементом вагона, например,с колесом 2; блока 12 управления поперечным перемещением труб 4 в направлении стрелки В, соединенного с приводом 13; блока 14 управления продольным перемещением труб 4 S направ лении стрелки Г, соединенного с приводом 15; блока 16 определения типа транспортного средства, выполненного в виде комплекса логических релейных или транспортных элементов и содержа щего/ например, многопозиционный дат чик 17 на основе фотореле с установленными на разной высоте ступенями. Блок 16 предназначен для преобразова ния сигналов, поступающих от датчико 17, в сигналы управления приводами 13 и 15, продольных и поперечных перемещений телескбпических труб; блока 18 управления подачей материала,соединенного с приводом 19 подачи материала; блока 20 управления выдвижением телескопических труб в направлении стрелки Д, соединенного с приводом 21 выдвижения. Блок 18 управления подачей материала соединен на входе и выходе с блоком 20 управления; блока 22 программ параметров перемещения телескопических труб, предназначенного для суммирования сигналов, поступающих от блока 16 определения типа транспортного средства и датчика 8 определения положения вагона, преобразования их и выработки задающего управляющего сигнала через блок 14 управления приводу 15, имеющему обратную связь с ним. Блок 22 соединен на входе с датчиком 8 определения положения транспортного средства,име ющего с ним обратную связь, и с блоком 16 определения типа транспортного средства, на входе - с блоком 14 управления продольным перемещением телескопических труб и с блоком 20 управления их выдвижением; задатчик 23 количества загружаемого материала, предназначенного для контроля количества загружаемого в транспортные средства материала по весу или объему и сигнализации о необходимости нача- ла и прекращения подачи. Он может быть выполнен в виде серийного весоизмерительного устройства, сблокированного, например, с осью циферблатного указателя весов. Задатчик 23 соединен на выходе с блоком 18 управления подачей материала, на входе с блоком 16 определения типа транспортного средства; блока 24 формирования команд исходного положения, предназначенного-для приведения устройства в исходное положение и пред.ставляющего набор логических устройств релейного или транзисторного типа. Блок 24 соединен на выходе с блоком 20 управления выдвижением телескопических труб, на выходе - с блоками 12 и 14 управлений продольным и поперечным перемещениями телескопических труб и с блоком 6 управления перемещением транспортного средства. Блоки 6, 12, 14, 18, 20 управлений предназначены для управления пуском и остановкой соответствующих приводов и регулирования их скоростей и могут быть выполнены в виде (с применением) автоматического выключателя, магнитного пускателя, конечных выключателей и логических устройств, либо специальных устройств управлений. Устройство работает следующим образом. При поступлении транспортного средства 1, например, железнодорожного вагона в зону загрузки, колесо 2
воздействует своей ребордой на рычаг с роликом датчика 5, от которого через блок 6 управления подается сигнал на остановку привода 7, например,маневрового устройства. Неточность остановки базового элемента колеса 2 вагона в зоне загрузки относительно труб 4, определяемая рядом факторов, влияющих на длину тормозного пути транспортного средства 1, остановленного приводом 7, в частности состоянием пути, количеством передвигаемых вагонов, их типом, весом и т.п. устанавливается датчиком 8 определения положения транспортного средства.Логическое устройство блока 6 управления, например, реле времени, запрограммированное на включение по прошествии транспортным средством тормозного пути, заведомо большего времени его остановочного пути, подает сигнал датчику 8 определения положеНИН. Исполнительные механизмы 9 и 10 датчика, включаясь в работу последовательно один за другим, перемещают ограничитель 11 хода до его упора в колесо 2 вагона, после чего ограни читель 11 хода останавливает механиз 10. От датчика 8 сигнал рассогласования вводится в блок 22 программ параметров перемещений труб и в виде преобразованного корректирующего сиг нала подается на блок 14 управления приводом 15 продольных перемещений телескопических труб 4, который, отработав заданную величину рассогласования и имея обратную связь с блоком 22, отключается сигналом последнего, обеспечив предельное перемещение телескопических труб.
Наряду с описанными действиями элементов автоматики, вводящей и отрабатывающей величину корректирующего перемещения труб вдоль пути вагона от датчика 17 блока 16 определения типа вагона приводам 13 и 15 через блоки 12 и 14 управлений и блок 22 программ параметров перемещений, подаются командные программные сигналы на обработку перемещений, соответствующих зафиксированному блоком 16 типу стандартного вагона. После обработки заданных перемещений блок 12 управления подает сигнал блоку 20 управления, обеспечивая выдвижение телескопических труб в люки приводом 21, вслед за чем блок 20 сигнализирует о готовности к подаче материала блоку 18 управления подачей. В случае отсутствия сигнала от блока 16 на блок 12 управления поперечным перемещением труб, т..е. при наличии в зоне загрузки вагона, снабженного люками, расположенными по его продольной оси, сигнал блоку 20 управления подается непосредственно от блока 22 программ параметров перемещений телескопических труб Задатчик 23 количества загруженного
материала, вводимый в действие по сигналу блока 16 определения типа вагона, также воздействует на блок 18, после чего последний включает привод 19, обеспечивающий подачу материала в вагон. После заполнения вагона заданным количеством материала задатчик 23 отключает привод 19 подачи материала через блок 18 управления , который подает- сигнал блоку 20, включаклцему привод 21 подъема телескопических труб. При этом специальные устройства блока 20 управления осуществляют подъем телескопических труб и в период заполнения вагона материалом, обеспечивая т.ем самым обеспыливание при загрузке пылевидны материалом. После обработки заданных величин лодъема телескопических труб блок 20 управления подает команду блоку 24 формирования команд, сигнал управления которого обеспечивают через блоки 12, 14 и 6 управления возвращение в исходные положения телескпических труб, благодаря отработке соответствующими приводами продольных и поперечных перемещений, перемещают вагон из зоны загрузки и подают под загрузку следующий вагон, обеспечивая цикличность загрузки каждого вагона и их непрерывный поток.
В качестве блоков 16 определения типа транспортного средства могут быть использованы блоки иного принципа действия, например, на основе гамма-реле или путевых выключателей и, в частности,не многопозиционного типа, а индикаторные на основе фотореле или контактного типа, используемые в этом случае в качестве ограничителей хода и установленные на исполнительном механизме с сервопривоуцом с возможностью вертикального перемещения для определения типа транспортного средства по его высоте или горизонтального - .для определения типа вагона по его длине.
В качестве датчиков 8 определения положения транспортного средства используются датчики иного принципа действия, например с применением акустических и других элементов.
Описание работы устройства приведено применительно к загрузке крытых железнодорожных вагонов, имеющих люки на крыше, но может быть применено и для загрузки других транспортных средств, например, цементновозов железнодорожных цистерн специального назначения, автоцистерн и др.
Экономическая эффективность и целесообразность практического применения устройства определяется сокращением времени загрузки материалов в транспортные средства, повьииением производительности всего загрузочного комплекса, комплексной автоматизацией процесса погрузки, снижением себестоимости загружаемого материала и повышением оборачиваемости транспортных средств.
Формула изобретения
1. Устройство для управления загрузкой материалов в крытые транспортные средства через люки с помощь телескопических труб, содержащее блоки управления продольным и поперечным перемещениями труб и их выдвижением и блоки управления подачей материала и перемещением транспортного средства, соединенные выходами с соответствующими приводами, отличающееся тем, что, с целью повышения производительности загрузки, оно снабжено датчиками остановки и определения положения транспортного средства, первый из которых подключен к входу, а второй - к выходу блока управления перемещением транспортного средства, и блоками определения типа транспортного средства и программ параметров перемещения телескопических труб, выходи первого мз которых соединены с входом блока управления поперечным перемещением труб и с одним из входов .блока программ параметров перемещения, другой
ТГ- гт Аг вход которого соединен с датчиком . определения положения транспортного средства, а выходы - с одними из входов блоков управления продольным перемещением труб и их выдвижением, другой вход последнего из которых соединен с выходом блока управления поперечным перемещением труб.
2. Устройство по п. 1, о т л и чающееся тем, что оно снабжено задатчиком количества загружаемого материала, включенным между выходом блока определения типа транспортного средства и одним из входов блока управления подачей материала, и блоком формирования команд исходного положения, соединенным выходами с блоками управления продольным и поперечным перемещениями труб и перемещением транспортного средства, а входом - с одним из выходов блока управления выдвижением труб, второй выход и третий вход которого соединены с другими входом и выходом соответственно блока управления подачей материала.
Источники информации, принятые во внимание при экспертизе
1. Патент СССР № 469097, кл. В 65 G, 67/22, 29.09.71 (прототип) .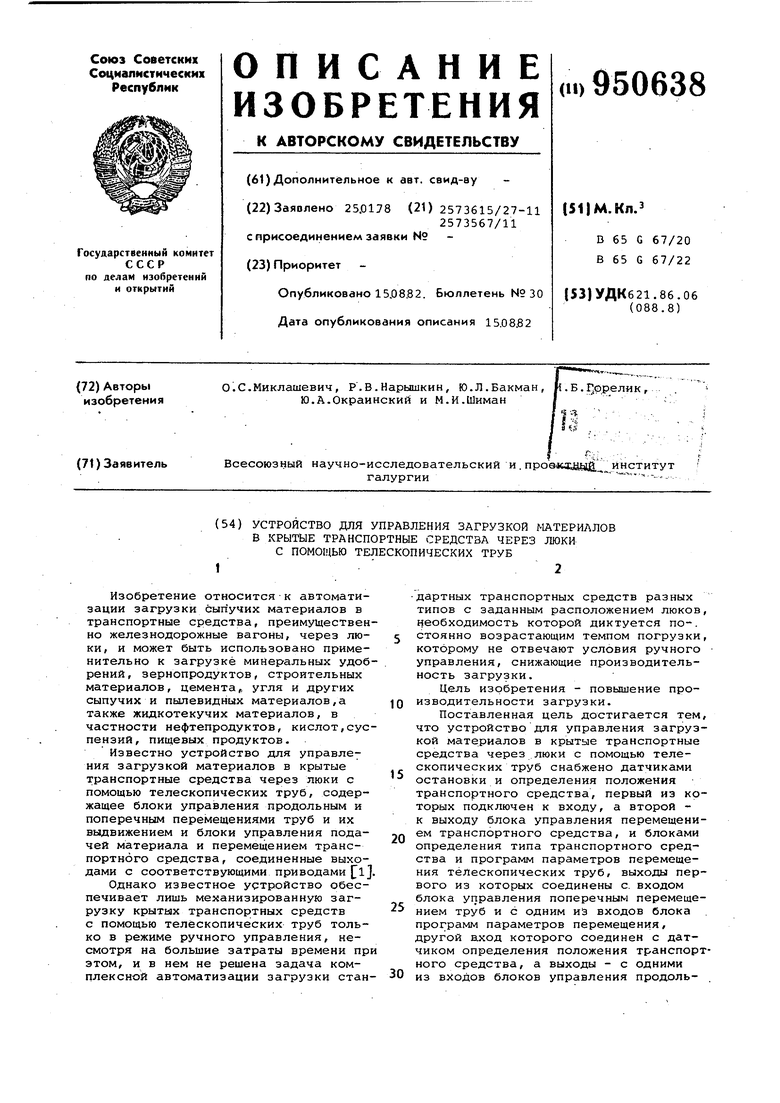

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления загрузкой материалов в крытые транспортные средства через люки с помощью телескопических труб | 1978 |
|
SU950637A1 |
| Устройство управления загрузкой сыпучих материалов в транспортные средства с помощью телескопических труб | 1977 |
|
SU676520A1 |
| МАНИПУЛЯТОР ДЛЯ ОЧИСТКИ ВАГОНОВ | 1987 |
|
RU2028226C1 |
| АВТОМАТИЧЕСКИЙ ПОГРУЗО-РАЗГРУЗОЧНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2018 |
|
RU2689080C1 |
| Устройство для перегрузки сыпучего материала | 1990 |
|
SU1782900A1 |
| Устройство для управления погрузкой сыпучих материалов из бункеров в движущийся состав | 1977 |
|
SU691371A1 |
| УСТАНОВКА САМОСВАЛЬНАЯ ДЛЯ ПЕРЕВОЗКИ ГРАНУЛИРОВАННОГО МАТЕРИАЛА (ВАРИАНТЫ) | 2018 |
|
RU2685488C1 |
| Устройство автоматического управления установкой для загрузки дозированными порциями сыпучего груза в транспортные средства | 1989 |
|
SU1765089A1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU361190A1 |
| Железнодорожный кран | 1987 |
|
SU1527135A1 |