1
Изобретение относится к области подъемно-транспортных устройств и может быть использовано для кОНтроля скорости подъемных машин шахтных подъемных установок.
Наиболее близким техническим решением к изобретению является ограничитель скорости шахтной подъемной установки, содержащий профилированный ретардируюш,ий диск, датчики заданной скорости, ,взаимодействуюш,ие с ретардируюш;им диском, и механизм -постоянной кинематической связи ретардирующего диска с валом подъемной машины .
Недостатками указанного устройства являются сложность конструкции, а также сравнительно невысокая точность контроля изменения скорости.
Целью изобретения является упрош;ение конструкции, а также повышение точности контроля изменения скорости.
Указанная цель достигается тем, что механизм постоянной кинематической связи содержит поводковый редуктор, на валу которого жестко установлен ретардируюш,ий диск, причем корпус поводкового редуктора соединен с валом подъемной машины, входной поводок связан с корпусом редуктора, а выходной поводок связан с валом редуктора.
Кроме того, с целью вывода профилированных участков ретардирующего диска из контакта с датчиками заданной скорости, ретардирующий диск может быть снабжен 5 возвратной пружиной.
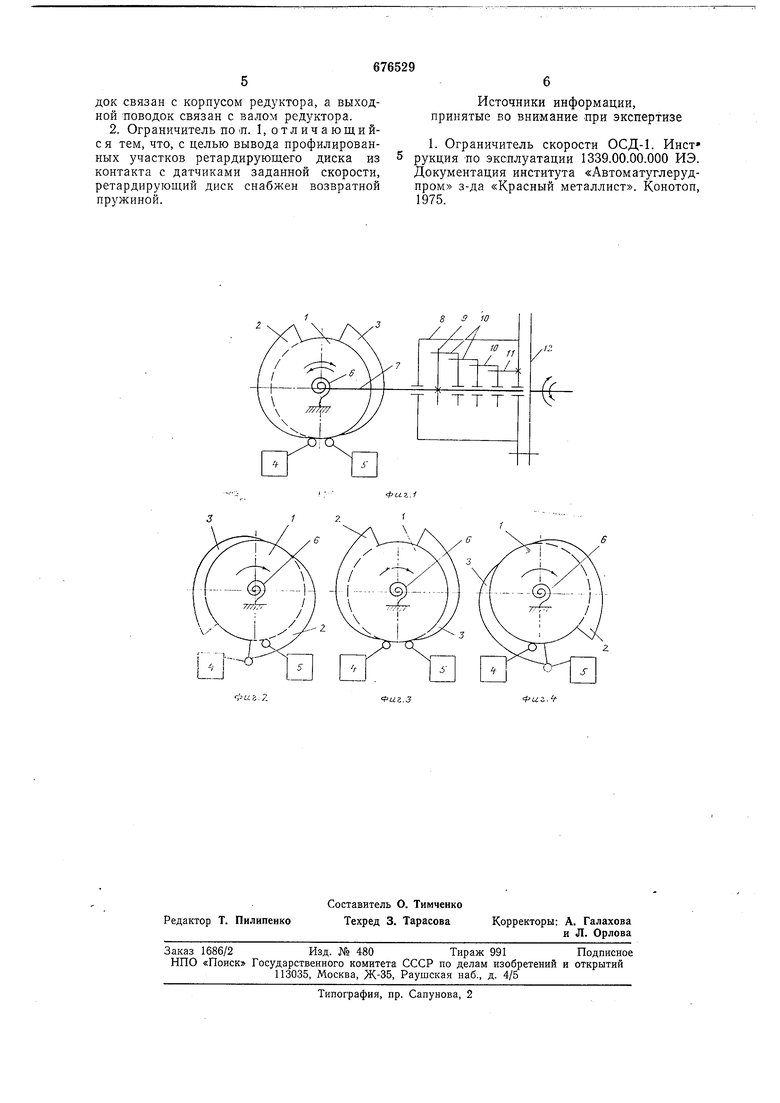
На фиг. 1 изображена кинематическая схема ограничителя скорости; на фиг. 2-4- основные рабочие положения профилированного ретардирующего диска в .контакте с датчиками заданной скорости за период одного полного цикла работы подъемной машины.
Ограничитель скорости содержит двухдорожечный ретардирующий диск 1 с профилями 2 и 3, размещенными каждый на своей дорожке, соответствующей одному из двух направлений вращения подъемной машины. Профили 2 и 3 контактируют соответственно с датчиками 4 и 5 заданной скорости, связанными с устройством сравнения заданной и действительной скоростей, имеющим выход в цепь защиты или регулирования скорости подъемной машины. Ретардирующий диск 1 снабжен возвратной пружиной 6. На валу 7 ретардирующего диска 1 свободно посажен корпус 8 поводкового редуктора. Внутри корпуса 8 на валу 7 имеются жестко закрепленный на нем выходной поводок 9, свободно посаженные передаточные поводки 10 и входной поводок II,
жестко закрепленный на корпусе редуктора. Корпус 8 поводкового редуктора посредством соединительного звена 12 кинематически связан с валом подъемной машины.
Работа ограничителя осуи1,ествляется еледующим образом.
Корпус 8 поводкового редуктора получает вращение от вала подъемной мангины либо непосредственно, либо через редукторное устройство. Одновременно с корпусом 8 совершает вращательное движение связанный с ним входной доводок 11. После одного оборота корпуса 8 на валу 7 входной новодок 11 вовлекает во вращение следующий за ним свободно расположенный на валу 7 один из передаточных новодков 10. После каждого последующего оборота корнуса 8 во вращательное движение вовлекаются носледовательно все один за другим остальные передаточные поводки 10. При этом вал 7 ретардирующего диска 1 н, следовательно, сам диск 1 остаются неподвижными. Вал 7 начинает вращаться только тогда, когда вовлекается во вращательное движение последний за передаточными поводкамн 10 выходной поводок 9, жестко связанный с валом 7. Этот совместный оборот корпуса 8 с валом 7 и ретарднрующим диском 1 является последним оборотом поводкового редуктора за полный цнкл работы подъемной машины.
Функционально выходы датчиков 4 и 5 заданной скорости разделены и они работают избирательно, каждый лнщь в одном направлении движения подъемной машины. Этим исключается ограничение форсированного разгона подъемной машины в начале цикла с ускорением большим, чем замедление, ограничнваемые датчиками заданной скорости на контролируемом участке пути.
В конечном положении для одного направления движения или, что то же самое в начальном положении для другого направления движения подъемной машины, весь свободный ход .поводкового редуктора выбран н совершен последний совместный его оборот с ретарДирующим диском 1. В этот момент ретардирующий диск 1, его профили 2 и 3 н контактирующие с ними подвижные элементы датчиков 4 и 5 заданной скорости занимают положение, изображенное на фиг. 2. При совершении очередного рабочего цикла, в начале движения подъемной машины, входной новодок 11 поводкового редуктора, поворачиваясь в обратном предыдущему направлении, расслабляет жесткую связь всех последующих передаточных цоводков этого редуктора, что позволяет возвратной пружине 6 вслед ча вращением новодка 11 повернуть на половину оборота ретардирующий диск 1, который при этом займет ноложение, изображенное на фиг. 3. Это нужно для того, чтобы профиль 2 вслед за движением подъемной мащины выщел из контакта с неработающим в этом направлении движения мащины датчиком 4 заданной скорости и тем самым не ограничивал скорость движения подъемной мащины в случае необходимости обратного ее движения с любого промежуточного положения за пределами контролируемого профилем 2 участка пути. При этом работающий в этом направлении движения машины датчик 5 заданной скорости с начала движения машины н после поворота ретардирующего диска 1 в положение, изображенное на фиг. 3, находится в контакте с окружностью постоянного радиуса ретардирующего диска 1 и этим положением датчика 5 контролируется заданная максимальная скорость подъемной машины в период ее разгона и на всем пути движения до начала замедления в конце рабочего цикла. С начала движения машины и в течение всего последующего периода рабочего цикла корпус 8 поводкового редуктора, соединенный с валом подъемной машины, вращается свободно на валу 7 ретардирующего диска 1, и последний после полуоборота в положение, изображенное на фиг. 3, остается в состоянии покоя. К концу рабочего цикла движения подъемной машины все передаточные поводки редуктора приходят в состояние жесткого между собой сцепления и на последнем обороте вращение корнуса 8 поводкового редуктора через новодок 9 передается валу 7 и связанному с ним ретардирующему диску 1, который своим профилем 3 воздействует на датчик 5 и тем обеспечивается контроль заданной тахограммы снижения скорости подхода подъемного сосуда к своему конечному положению. При остановке нодъемной машины в конце рабочего цикла рассмотренного направления движения ретардирующий диск 1, его нрофили 2 и 3 и контактирующие с ними подвижные элементы датчиков 4 и 5 займут ноложение, изображенное на фиг. 4. При последующем цикле работа элементов ограничителя скорости повторится в обратной носледовательности.
Формула изобретения
1. Ограничитель скорости шахтной подъемной установки, содержащий профилированный ретардирующий диск, датчики заданной скорости, взаимодействующие с ретардирующим диском, и механизм постоянной кинематической связи ретардирующего диска с валом подъемной мащнны, отличающийся тем, что, с целью упрощения конструкции, а также повыщения точности контроля изменения скорости, механизм постоянной кинематической связи содержит поводковый редуктор, на валу которого жестко установлен ретардирующий диск, причем корпус поводкового редуктора соединен с валом подъемной машины, входной поводок связан с корпусом редуктора, а выходной ПОВОДОК связан с валом редуктора.
2. Ограничитель по л. 1,отличающийс я тем, что, с целью вывода профилированных участков ретардирующего диска из контакта с датчиками заданной скорости, ретардирующий диск снабжен возвратной пружиной.
Источники информации, принятые во внимание при экспертизе
1. Ограничитель скорости ОСД-1. Инст рукция по эксплуатации 1339.00.00.000 ИЭ. Документация института «Автоматуглерудпром з-да «Красный металлист. Конотоп, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ограничитель скорости шахтной подъемной установки | 1981 |
|
SU983012A1 |
| Ограничитель скорости шахтной подъемной машины | 1953 |
|
SU112732A1 |
| Регулятор хода шахтной подъемной машины | 1945 |
|
SU68337A1 |
| УКАЗАТЕЛЬ ГЛУБИНЫ ШАХТНОЙ ОДНОБАРАБАННОЙ ПОДЪЕМНОЙ МАШИНЫ | 1973 |
|
SU361963A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ВАЛА МЕХАНИЗМА ПРИВОДА БАШЕННОГО КРАНА | 2004 |
|
RU2278354C1 |
| ГИДРАВЛИЧЕСКИЙ ОГРАНИЧИТЕЛЬ СКОРОСТИ | 1967 |
|
SU203864A1 |
| Электрический ограничитель скорости подъемной машины | 1979 |
|
SU867834A1 |
| Электрический ограничитель скорости подъемной машины | 1980 |
|
SU945040A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU948869A1 |
| Делительное устройство | 1981 |
|
SU1009718A1 |
L:J
Puz.tPuz.3
