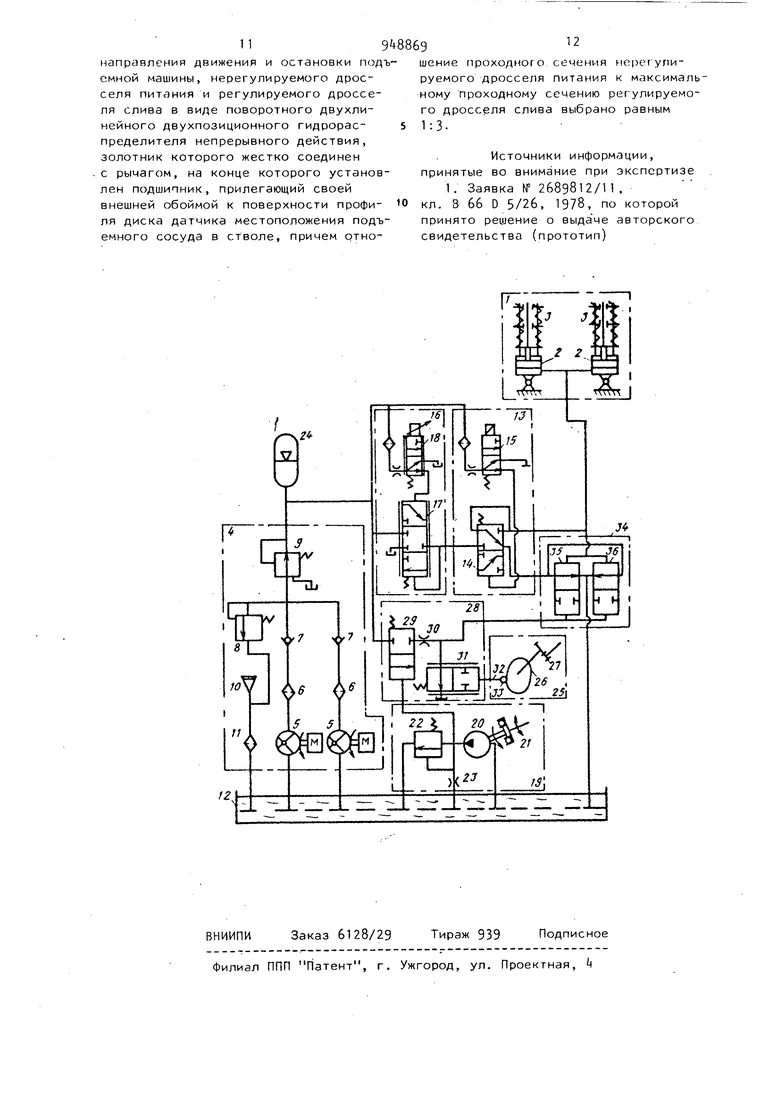
Изобретение относится к аппаратуре управления и может быть использовано в тормозных системах шахтных подъемных установок. Известна система управления тормозо шахтной подъемной машины, содержащая привод тормоза, выполненный в виде тормозных цилиндров и пружинных блоков, источник давления рабочей жидкости, гидравлически соединенный с гидробаком, с устройством предохранительного торможения, выполненным в виде двухпозиционного четырехлинейного гидрораспределителя дискретного действия с гидроэлектромеханическим управлением, с регулятором давления, выполненным в виде трехпозиционного трехлинейного гидрораспределителя непрерывного действия с гидроэлектромеханическим управлением, с датчиком направления движения и остановки подъемной машины, выполненным в виде насоса, кинематически связанного с валом подъемНОЙ машины, на выходе которого установлены параллельно включенные предохранительный клапан и нерегулируемый дроссель 1. Эта система управления тормозом позволяет получить тормозную характеристику, параметры которой зависят от вида выполняемой операции (спуск или подъем). В условиях наклонных стволов с переменным по длине выработки углом наклона тормоз с такой системой управления не может осуществить режим предохранительного торможения, отвечающий всем требованиям правил безопасности, так как эта система не позволяет регулировать величину тормозного усилия в зависимости от угла наклона выработки и в результате этого на наклонных подъемах зачастую наблюдается явление набегания подъемного сосуда на канат при предохранительном торможении, что может привести к обрыву подъемного каната. Недостатком известной системы является отсутствие в системе управ ления тормозом узла корректировки величины тормозного усилия в зависимости от угла наклона выработки, что снижает безопасность эксплуатации подъемной установки в условиях наклонных стволов с переменным по длине выработки углом наклона. Целью изобретения является повышение безопасности эксплуатации подъемной машины в условиях наклонных стволов с переменным по длине, выработки углом наклона. Цель достигается тем, что систем снабжена аккумулятором давления, включенным на выходе источника давления рабочей жидкости, формировате лем сигналов задания, датчиком местоположения подъемного сосуда в стволе, устройством регулирования величины тормозного усилия, установ ленным на выходе из устройства пред хранительного торможения, причем входы формирователя сигналов задания соединены с выходами датчика местоположения подъемного сосуда в стволе, датчика направления движени и остановки подъемной машины и источника давления рабочей жидкости, а выход - с входом устройства регул рования величины тормозного усилия, другой вход которого соединен с тор мозными цилиндрами. Устройство регулирования величин тормозного усилия выполнено в виде двух параллельно включенных двухпозиционных двухлинейных гидрораспределителей дискретного действия. Датчик местоположения подъемного сосуда в стволе выполнен в .виде профилированного диска, кинематичес ки связываемого с валом подъемной машины посредством редуктора с пере даточным отношением, определяемым п формуле 3 го наклонная длина откатки, м; диаметр органа навивки подъ емной машины, м. Кроме того, датчик направления движения и остановки подъемной маши ны выполнен в виде нереверсивного насоса, соединяемого своим валом с быстроходным валом редуктора подъем ной машины посредством муфты свобод ного хода, а диаметр упомянутого не 4 регулируемого дросселя определен по формуле где Л чувствительностьзаданная м/с; датчика, подача насоса за один оборот вала , передаточное отношение дуктора; диаметр органа навивки подъемной машины, м; удельный вес рабочей жидкости, коэффициент гидравлических сопротивлений; ускорение свободного падения, м/с ; минимальное рабочее давление на выходе датчика. Па. Формирователь сигналов задания выполнен в виде подпружиненного двухлинейного двухпозиционного гидрораспределителя дискретного действия, камера управления которого соединена с выходом датчика направления движения и остановки подъемной машины, нерегулируемого дросселя питания и регулируемого дросселя слива в виде поворотного двухлинейного двухпозиционного гидрораспределителя непрерывного действия, золотник которого жестко соединен с рычагом, на конце которого установлен подшипник, прилегающий своей внешней обоймой к поверхности профиля диска датчика местоположения подъемного сосуда в стволе, причем отношение прохо.дного сечения нерегулируемого дросселя питания к максимальному проходному сечению регулируемого дросселя слива выбрано равным 1:3. На чертеже приведена принципиальная гидравлическая схема предложенной системы управления тормозом шахтной подъемной машины. Система управления тормозом шахтной подъемной машины включает привод тормоза 1 в виде тормозных цилиндров 2 и пружинных блоков 3) источник давления рабочей жидкости k, состоящий из насосов 5 связанных с электродвигателями, фильтров 6, обратных клапанов 7 предохранительного 8 и разгрузочного 9 клапанов и устройства для заливки рабочей жидкости 10 с фильтром 11, гидробак 12, устройство предохранительного торможения 13 в виде двухпозиционного метырехлииейного гидрораспределителя дискретного действия с электрогидромеханической головкой управления 15, регулятор давления 16 в виде трехпозиционного гидрораспределителя непрерывного действия 17 с электромеханической го.ловкой управления 18, датчик направления движения и остановки подъемной машины 19 выпо ненный в виде нереверсивного насоса 20, вал которого соединен с быстроходным валом редуктора подъемной ма шины посредством муфты свободного хода 21, а на выходе установлены па раллельно включенные предохранитель ный клаНан 22 и нерегулируемый дрос сель 23, аккумулятор давления 2, включенный на выходе источника давления рабочей ЖИДКОСТИ , датчик местоположения подъемного сосуда в стволе 25, выполненный в виде профи лированного диска 26, высота профиля которого зависит от местоположения подъемного сосуда в стволе, кинематически связанного с валом подъ емной- машины посредством редуктора 27, формирователь сигналов задания 28 в виде подпружиненного двухлинейного двухпозиционного гидрорас пределителя дискретного действия . 29, камера управления которого соед нена с выходом датчика направления движения и остановки подъемной маши ны 19, нерегулируемого дросселя питания 30 и регулируемого дросселя слива 31 в виде поворотного двухлинейного двухпозиционного гидрораспределителя непрерывного действия, золотник которого жестко соединен с рычагом 32, на конце которого установлен подшипник 33, прилегающий своей внешней обоймой к поверхности профилированного диска 26 датчика . местоположения подъемного сосуда в стволе 25, устройство регулирования величины тормозного усилия З уста новленное на сливнЬм канале устройства предохранительного торможения 13, выполненное в виде двух параллельно включенных двухпозиционных двухлинейных гидрораспределителей 35 и 36 дискретного действия, камеры управления которых соединены с выходом формирователя сигналов зада ния 28, и камеры обратной связи - с подпоршневыми полостями тормозных цилиндров 2 привода то моза 1 . б9 6 Работает система следующим об разом. При включении одного из насосов 5 (второй обычно резервный) в сие- тему подается рабочая-жидкость под давлением, определяемым настройкой предохранительного 8 и разгрузочного 9 клапанов, и аккумулятор давления 2 заряжается. Зарядка предохранительного тормоза осуществляется подачей напряжения на обмотку гидроэлектромеханической головки управления 15 устройства предохранительного торможения 13При этом золотник гидрораспределителя 14 переставляется в верхнее положение и соединяет распределительную полость регулятора давления 16 с подпоршневыми полостями тормозных цилиндров 2. При подаче напряжения на обмотку гидроэлектромеханической головки управления 18 регулятора давления 16 золбтник гидрораспределителя 17 переставляется в нижее положение, соединяя распределительную полость с нагнетательной полостью. Рабочая жидкость через регулятор давления 16 и устройство предохранительного торможения 13 поступает в подпоршневые полости тормозных цилиндров 2.Поршни последних поднимаются, дополнительно сжимая пружинные блоки 3,и подъемная машина растормаживается. В случае подъема груза насос 20 датчика направления движения 19 подает жидкость в камеру управления гидрораспределителя 23 формирователя сигналов задания 28. При скорости вращения насоса 20, соответствующей порогу срабатывания датчика 19, давление на его выходе достигает давления переключения распределитеяя 29, золотник последнего переставляется в верхнее положение, включая в работу формирователь сигналов задания 28. В формирователь сигналов задания включены два дросселя: один - нерегулируемый дро-.сель питания 30, другой регулируемый дроссель слива 31. Соотношение Проходных сечений этих дросселей определяет давление жидкости на выходе формирователя сигналов задания 28.Так как на дроссель 31 действует профилированный диск 2б, высота профиля которого зависит от местоположения подъемного сосуда 8 стзоле, то, очевидно, давл::;-1ие на выходе формирователя сигналов задания 28 также зависит от местоположения подъемного сосуда в стволе. Таким образом, при подъеме груза формирователь сигналов задания 28 непрерывно вырабатывает сигнал в виде давления жидкости, величина ко торого зависит от местоположения сосуда в стволе (угла наклона участ ка выработки, на котором находится подъемный сосуд) При предохранительном торможении обесточиваются обмотки головок управления 15 устройства предохрани тельного торможения 13 регулятора давления 16. В этом случае золотник устройства предохранительного тормо жения 13 переставляется в нижнее положение, отсекая распределительную полость регулятора давления 16 от подпоршневых полостей тормозных цилиндров 2 и соединяет последние с устройством регулирования величины тормозного усилия З. Золотники гидрораспределителей 35 и 36 устрой ства регулирования величины тормозного усилия 3 при расторможенной машине находятся в положении Откры так как максимальное давление на выходе формирователя сигналов за дания 28 принято равным давлению, при котором тормозные колодки сопри касаются с тормозным ободом, которое меньше давления растормаживания. Поэтому жидкость из тормозных цилиндров 2 чеоез устройство предохранительного торможения 13 и устро ство оегупиоования величины тормозного усилия 3 сливается в маслобак 12, и давление в подпоршневых полос тях и соединенных с ними камерах обратной свя; гидрораспределителей 35 36 уменьшается. При снижении давления до величины, равной сигнал задания, золотника гидоораспределителей 35 и 36 переставятся в положе ние Закрыто и отсекут подпоршневые полости тормозных цилиндров 2 от слива и в них останется давление примерно равное зеличине сигнала за дания на выходе формирователя сигна лов задания 28. Таким образом, в случае предохра нительного торможения при подъеме груза к подъемной машине прикладывается ступень тормозного усилия, величина которой определяется углом наклона участка выработки на 9 котором находится подъемный сосуд в момент предохранительного торможения (местоположения сосуда в стволе). При торможении подъемной машины скорость вращения ее органов навивки к кинематически связанного с ними насоса 20 датчика направления движения и остановки подъемной машины 19 уменьшается. При достижении скорости, соответствующей порогу чувствительности датчика (4% от максимальной скорости подъема), давление на его выходе станет меньше давления переключения гидрораспределителя 29 формирователя сигналов задания 28. Золотник гидрораспределителя 29 переставится а нижнее закрытое положение и отключит формирователь сигналов задания 28, т.е. давление на его выходе и в камерах управления гидрораспределителей 35 и Зб устройства регулирования величины тормозного усилия З исчезнет. Под действием давления в камерах обратной связи золотники гидрораспределителей 35 и Зб переставятся В положение Открыто, и вся оставшаяся в подпоршневых полостях тормозных цилиндров 2 жидкость сольется в маслобак 12, т.е. наложится полное тормозное усилие. При спуске груза давление на вь1ходе датчика направления движения и остановки подъемной машины 19 отсутствует, золотник гидрораспределителя находится в нижнем закрытом положении, давление на выходе формирователя сигналов задания 28 отсутствует , золотники гидрораспределителей 35 и 36 устройства регулирования величины тормозного усилия 3 находятся в открытом положении. 8 случае предохранительного торможения вся рабочая жидкость из тормозных цилиндров 2 сливается в маслобак 12, т.е. происходит наложение полного тормозного усилия. Для обеспечения нормальной работы системы управления тормозом на случаи полного обесточивания подъема в систему введен аккумулятор давления , который является резервным источником давления рабоией жидкости. Испытания предложенной системы управления тормозом шахтной подъемной машины в условиях наклонного ствола подтвердили возможность полу-i чения регулируемой в зависимости от местоположения сосуда в стволе (угла наклона выработки) ступени торможения при подъеме груза, что повышает безопасность эксплуатации подъемной установки в условиях наклонных стволов. Формула изобретения 1. Система управления тормозом шахтной подъемной машины, содержащая привод тормоза, выполненный в виде тормозных цилиндров и пружинных блоков, источник давления рабочей жидкости, гидравлически соедин ный с гидробаком, с устройством предохранительного торможения, выполненным в виде двухпозиционного четырехлинейного гидрораспределител дискретного действия с гидроэлектро механическим управлением, с, регулятором давления, выполненным в виде трехпозиционного трехлинейного гидрораспределителя непрерывного действия с гидроэлектромеханическим управлением, с датчиком направления движения и остановки подъемной машины, выполненным в виде насоса, кинематически связанного с валом подъемной машины, на выходе которого установлены параллельно включенные предохранительный клапан и нерегулируемый дроссель, отличающаяся тем, что, с целью повышения безопасности эксплуатации подъемной машины в условиях наклонных стволов с переменным по длине выработки углом наклона, система снабжена аккумулятором давления, включенным на выходе источника давления рабочей жидкости, формирователем сигналов задания, датчи ком местоположения подъемного сосуд в стволе, устройством регулирования величины тормозного усилия, установ ленным на выходе из устройства предохранительного торможения, причем входы формирователя сигналов задания соединены с выходами датчика местоположения подъемного сосуда в стволе, датчика направления движе ния и остановки подъемной машины и источника давления рабочей жидкости, а выход -с входом устройства регулирования величины тормозного усилия, другой вход которого соединен с тормозными цилиндрами. б9О 2.Система по п. 1, отличающаяся тем, что устройство регулирования величины тормозного усилия выполнено в виде двух параллельно включенных двухпозиционных двухлинейных гидрораспределителей дискретного действия 3.Система по п. 1, отличающаяся тем, что датчик местоположения подъемного сосуда в стволе выполнен в виде профилированного диска, кинематически связываемого с валом подъемной машины посредством редуктора с передаточным отношением, определяемым по формуле где L - наклонная длина откатки, м; D - диаметр ор(ана -навивки подъемной машины, м. 4. Система по п. 1, отличающаяся тем, что датчик направления движения и остановки подъемной машины выполнен в виде нереверсивного насоса, соединяемого своим выходом с быстроходным валом редуктора подъемной машины посредством муфты свободного хода, а диаметр упомянутого нерегулируемого дросселя определен по формуле 2gjUfrP где я - заданная чувствительность датчика, м/с; О - подача насоса за один оборот вала, передаточное отношение редуктора ; 0- диаметр органа навивки подъемной машины, м; 1- удельный вес рабочей жидкости, fU - коэффициент гидравлических сопротивлений; 6 - ускорение свободного падения, р - минимальное рабочее давление на выходе датчика. Па. 5. Система по п. 1, отличающаяся тем, что формирователь сигналов задания выполнен в виде подпружиненного двухлинейного двухпозиционного гидрораспределителя дискрет-. ного действия, камера управления которого соединена с выходом датчика 11 gtss направления движения и остановки подъсмной машины, нерегулируемого дросселя питсэния и регулируемого дросселя слива в виде поворотного двухлинейного двухпозиционного гидрораспределителя непрерывного действия, золотник которого жестко соединен с рычагом, на конце которого установ лен подшипник, прилегающий своей внешней обоймой к поверхности профи- О ля диска датчика местоположения подъемного сосуда в стволе, причем отноSg12 шение {троходиого. сечения нерегупируемого дросселя питания к максимальному проходному сечению регулируемого дросселя слива выбрано равным 1:3. Источники информации, принятые во внимание при экспертизе 1. Заявка № 2689812/1 1 , кл, В 66 О 5/26, 197В, по которой принято решение о выдаче авторского свидетельства (прототип)


| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления тормозом шахтной подъемной машины | 1983 |
|
SU1180350A2 |
| Система управления тормозом шахтной подъемной машины | 1985 |
|
SU1306898A2 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1009994A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1008150A1 |
| Устройство для регулирования направления движения и остановки подъемной машины | 1983 |
|
SU1142429A1 |
| Устройство управления тормозом шахтной подъемной машины | 1986 |
|
SU1404450A1 |
| Устройство для управления тормозом подъемной машины | 1988 |
|
SU1504211A1 |
| Система управления пружинно-гидравлическимпРиВОдОМ ТОРМОзА шАХТНОй пОд'ЕМНОй МАшиНы | 1978 |
|
SU800122A1 |
| Система управления тормозом шахтной подъемной машины | 1978 |
|
SU747806A1 |
| Устройство для определения движения и остановки подъемной машины | 1982 |
|
SU1177252A1 |
