Уже известны регуляторы хода шахтной подъемной машины, заключаюш,1ие в себе диференциальный рычаг, средняя часть которого кинематически связана с органом управления, один конец рычага взаимодействует с профилированным диском указателя глубины, а второй с элементом, определяюш,им скорость.
Согласно изобретению, элемент, определяюш,ий скорость (датчик), выполнен в виде профилированного диска, приводимого во враш,ение с равномерной скоростью, что может быть осуществлено, например, применением синхронного электродвигателя.
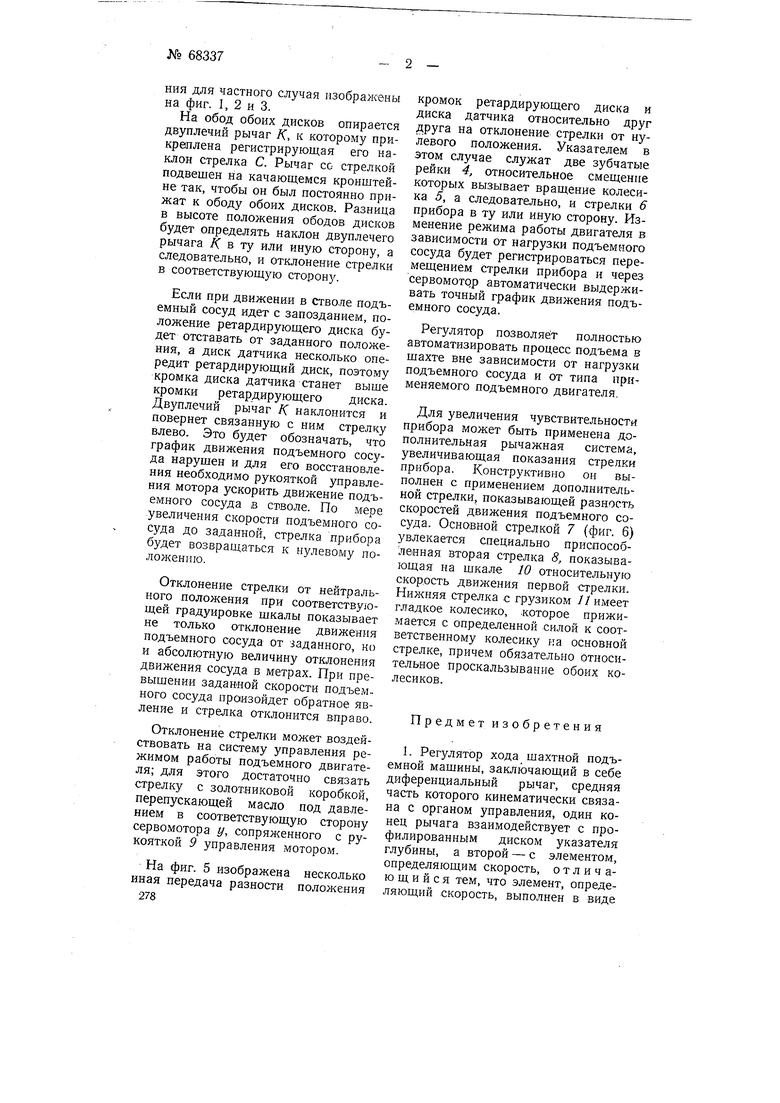
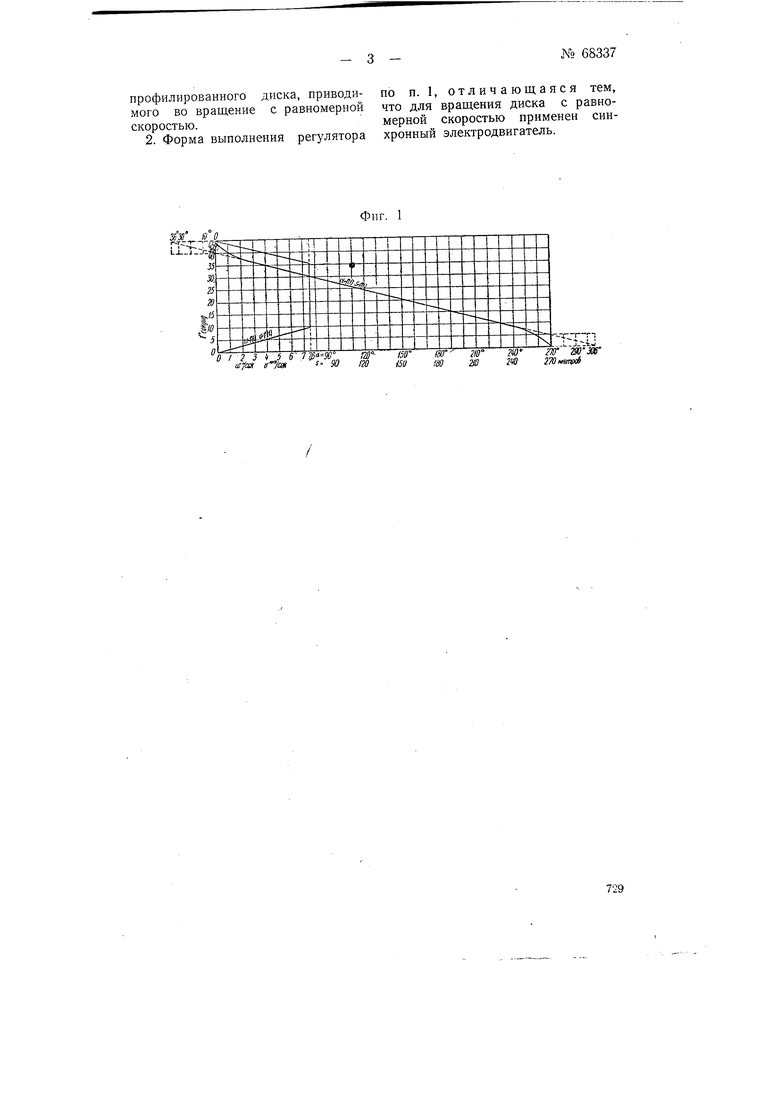
На фиг. 1-3 изображено предлагаемое построение профиля ретардирующего диска и диска датчика; на фиг. 4 - кинематическая схема регулятора; на фиг. 5 - вариант схемы механизма поворота стрелки; на фиг. 6 - схема взаимодействия двух стрелок.
В стандартном указателе глубины 3 используется привод на ретардируюш,ий диск Р (фиг. 4), на котором крепится шаблон с кривой, построенной по какому-либо закону, например, по архимедовой спирали.
Рядом с ретардирующим диском и параллельно ему располагается соосный с ним диск G датчика с приводом от асинхронного или синхронного электромотора / с понижением числа оборотов редуктором 2. На диске датчика также крепится шаблон, но- уже с кривой, построенной в результате анализа графика движения подъемного сосуда в стволе шахты по времени, т. е. У / (t).
Метод построения данной кривой сводится в основном к построению кривых (t), т. е. заданной тахограммы, и путем пересчета построения графика движения подъемного сосуда (t), с дальнейшим переводом данных в зависимость углового перемещения ретардирующего диска от времени, т. е,а f(t). Для диска датчика n const, а следовательно, , где а - постоянное число, так как вращение диска датчика происходит с постоянной угловой скоростью. Далее строится кривая зависимости угла перемещения ретардирующего диска от угла перемещения диска датчика. Затем заданная кривая трансформируется на ретардирующем диске в кривую для диска датчика. Все эти построе277
ния для частного случая изображены на фиг. 1, 2 и 3.
На обод обоих дисков опирается двуплечий рычаг /С, к которому прикреплена регистрирующая его наклон стрелка С. Рычаг со стрелкой подвешен на качающемся кронштейне так, чтобы он был постоянно прижат к ободу обоих дисков. Разница в высоте положения ободов дисков будет определять наклон двуплечего рычага Д в ту или иную сторону, а следовательно, и отклонение стрелки в соответствующую сторону.
Если при движении в стволе подъемный сосуд идет с запозданием, положение ретардирующего диска будет отставать от заданного положения, а диск датчика несколько опередит ретардирующий диск, поэтому кромка диска датчика станет выше кромки ретардирующего диска. Двуплечий рычаг /С наклонится и повернет связанную с ним стрелку влево. Это будет обозначать, что график движения подъемного сосуда нарушен и для его восстановления необходимо рукояткой управления мотора ускорить движение подъемного сосуда в стволе. По мере увеличения скорости подъемного сосуда до заданной, стрелка прибора будет возвращаться к нулевому положению.
Отклонение стрелки от нейтрального положения при соответствующей градуировке шкалы показывает не только отклонение движения подъемного сосуда от заданного, ко и абсолютную величину отклонения движения сосуда в метрах. При превышении заданной скорости подъемного сосуда произойдет обратное явление и стрелка отклонится вправо.
Отклонение стрелки может воздействовать на систему управления режимом работы подъемного двигателя; для этого достаточно связать стрелку с золотниковой коробкой, перепускающей масло под давлением в соответствующую сторону сервомотора у, сопряженного с рукояткой 9 управления мотором.
На фиг. 5 изображена несколько иная передача разности положения 278
кромок ретардирующего диска и диска датчика относительно друг друга на отклонение стрелки от нулевого положения. Указателем в этом случае служат две зубчатые рейки 4, относительное смещение которых вызывает вращение колесика 5, а следовательно, и стрелки 6 прибора в ту или иную сторону. Изменение режима работы двигателя в зависимости от нагрузки подъемного сосуда будет регистрироваться перемещением Стрелки прибора и через cepBOMOTQp автоматически выдерживать точный график движения подъемного сосуда.
Регулятор позволяет полностью автоматизировать процесс подъема в шахте вне зависимости от нагрузки подъемного сосуда и от типа применяемого подъемного двигателя.
Для увеличения чувствительности прибора может быть применена дополнительная рычажная система, увеличивающая показания стрелки прибора. Конструктивно он выполнен с применением дополнительной стрелки, показывающей разность скоростей движения подъемного сосуда. Основной стрелкой 7 (фиг. 6) увлекается специально приспособленная вторая стрелка 8, показывающая на шкале 10 относительную скорость движения первой стрелки. Нижняя стрелка с грузиком // имеет гладкое колесико, .которое прижимается с определенной силой к соответственному колесику ка основной стрелке, причем обязательно относительное проскальзывание обоих колесиков.
Предмет изобретения
1. Регулятор хода шахтной подъемной машины, заключающий в себе диференциальиый рычаг, средняя часть которого кинематически связана с органом управления, один конец рычага взаимодействует с профилированным диском указателя глубины, а второй - с элементом, определяющим скорость, отличающийся тем, что элемент, определяющий скорость, выполнен в виде профилированного диска, приводимого во вращение с равномерной скоростью. 2. Форма выполнения регулятора по п. 1, отличающаяся тем, что для вращения диска с равномерной скоростью применен синкронный электродвигатель.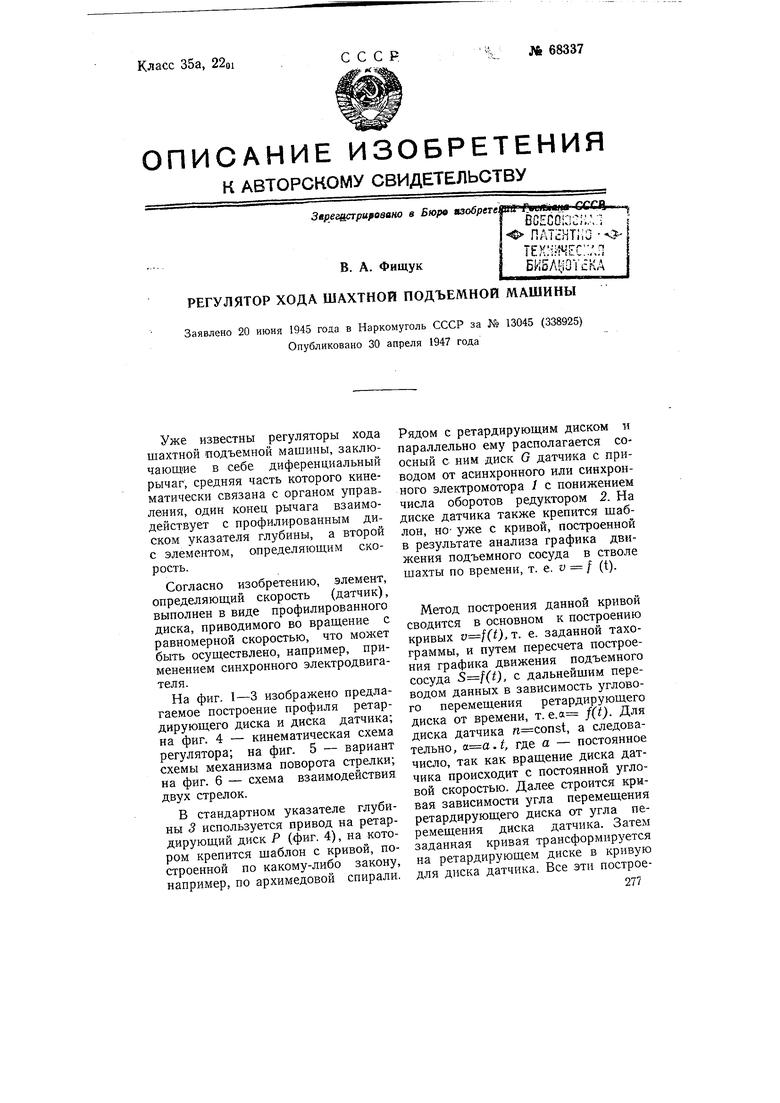
| название | год | авторы | номер документа |
|---|---|---|---|
| УКАЗАТЕЛЬ ГЛУБИНЫ ШАХТНОЙ ОДНОБАРАБАННОЙ ПОДЪЕМНОЙ МАШИНЫ | 1973 |
|
SU361963A1 |
| Ограничитель скорости шахтной подъемной машины | 1953 |
|
SU112732A1 |
| Устройство для управления предохранительным торможением подъемной установки | 1975 |
|
SU753761A1 |
| Устройство для программирования скорости | 1981 |
|
SU1030770A1 |
| Система управления тормозом шахтной подъемной машины | 1983 |
|
SU1180350A2 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU948869A1 |
| Ограничитель скорости шахтной подъемной установки | 1977 |
|
SU676529A1 |
| Скрепер | 1982 |
|
SU1021726A1 |
| Система управления тормозом шахтной подъемной машины | 1985 |
|
SU1306898A2 |
| РЕГУЛЯТОР СКОРОСТИ ПОДЪЕМНЫХ МАШИН | 1941 |
|
SU67427A1 |
фиг. 1
f apJar
