(54) КРАН-ШТАВЕЛЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-штабелер | 1983 |
|
SU1134528A1 |
| КРАН-ШТАБЕЛЕР | 1965 |
|
SU214390A1 |
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1773813A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Телескопический складской кран | 1975 |
|
SU662003A3 |
| Консольный кран | 1980 |
|
SU954360A1 |
| СПОСОБ НАРАЩИВАНИЯ БАШЕННОГО КРАНА | 2019 |
|
RU2712489C1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Устройство для хранения штучных грузов | 1990 |
|
SU1779654A1 |
Изобретение относится к подъемнотранспортному складскому оборудованию и может быть использовано для обслуживания стеллажей на складе и перемещениягрузов из одной зоны хранения в другую.
Наиболее близким к предлагаемому является кран-штабелер, содержащий подвижный мост с т ележкой, на которой закреплена телескопическая колонна с вилочным захватом, состоящая из неподвижной верхней и подвижных нижних секций, имеющих фиксаторы их крайних положений и связанных с механизмом их перемещения посредством тягового органа 1.
Недостатком известного крана является неудобство его использования для перемещения грузов из одной зоны хранения в другую и невозможность - ::уиествленияОбычных подъемно-транспортных операций, что сужает его технологические возможности.
Цель изобретения - расширение технологических возможностей крана.
Поставленная цель достигается тем,, что по крайней мере одна нижняя секция колонны шарнирно связана с вышерасположенной с возможностью поворота в вертикальной плоскости, при
этом на одной из нижних секций установлена каретка с поворотной в вертикальной плоскости обоймой, а тяговый орган расположен в последней, причем продольная ось тягового органа совмещена с центром вращения обоймы, а секции снабжены направляющими ограничителями для тягового органа.
10
При этом фиксаторы могут содержать подпружиненные пальцы, закрепленные на вышерасположенных секциях и взаимодействующие с наЛравляющими
15 пазами и отверстиями, выполненными в смежных нижерасположенных секциях, поворотные вьодвижные пальцы с выступами, взаимодействующими о направляющими элементами, расположен20 .ными на нижерасположенных секциях и имеющими винтовую поверхность, и собачки/ закрепленные на вышерасположенных секциях и взаимодействующие с выдвижными пальцами..
25 V Кроме того, шарнирное соединение секций выполнено в виде подпружиненных пальцев, при этом упомянутые пальцы размещены на вьЕиерасположенной секции со смещением относительно продольной оси тягового органа.
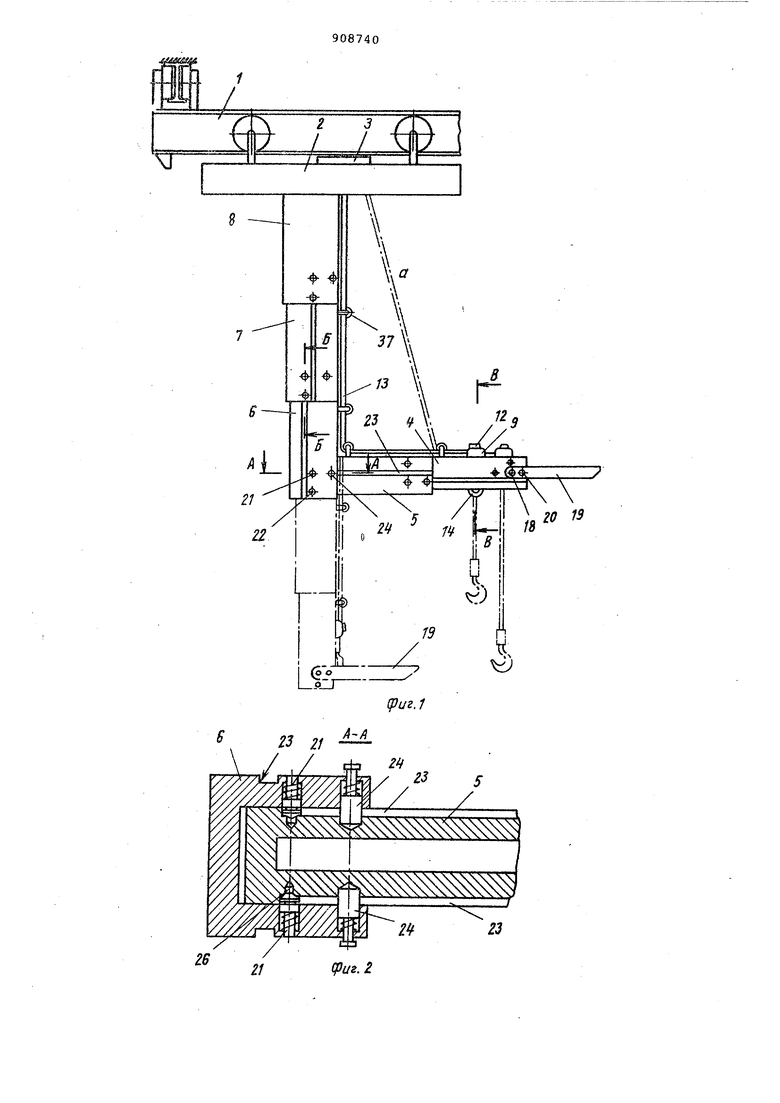
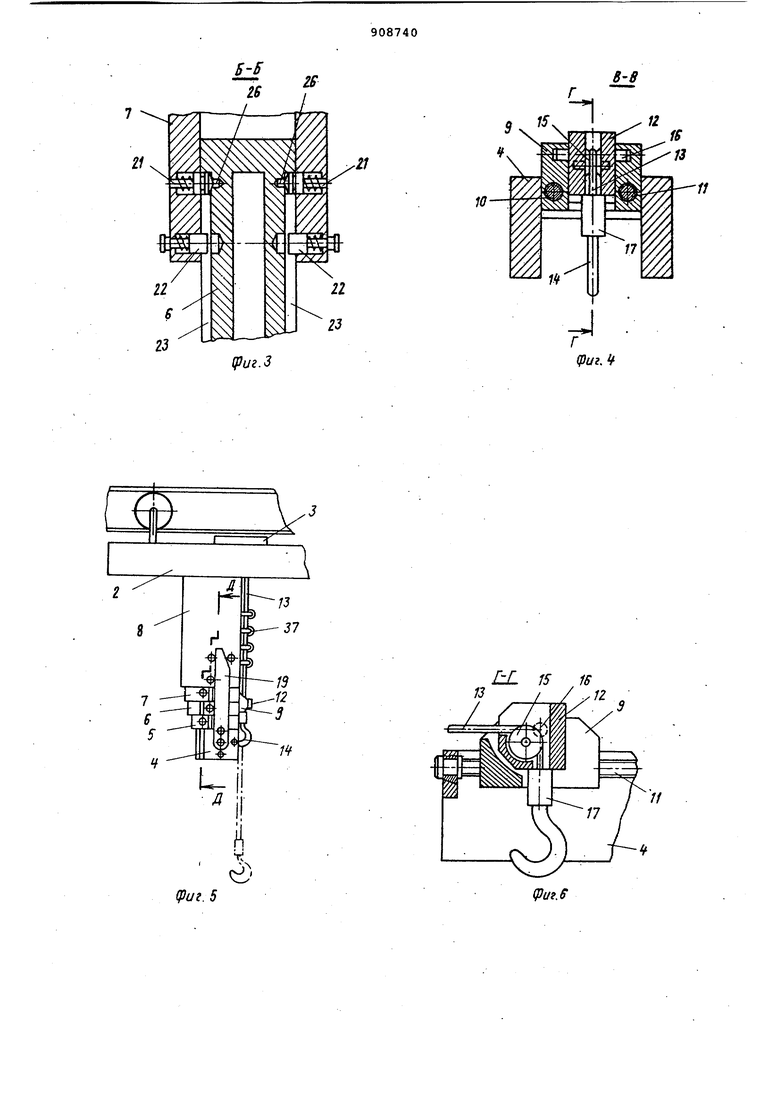
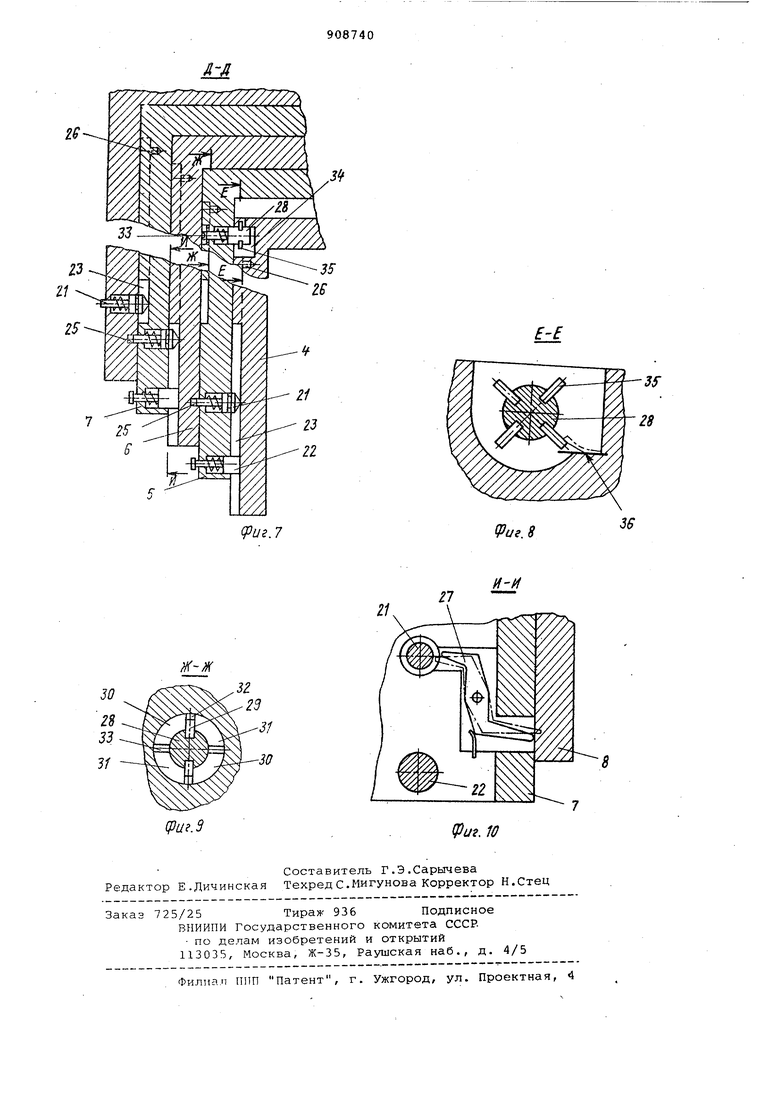
30 а на тяговом органе закреплен допол нительный грузозахват. На фиг. 1 показан предлагаемый кран-штабелер, общий вид; на фиг, 2 сечение А-А на фиг. 1; на фиг. 3 сечение Б-Б на фиг. 1; на фиг. 4 сечение В-В.на,фиг . на фиг. 5 направляющая крана-илтабелера в поднятом положении на фиг. б сече ние Г-Г на фиг. 4; на фиг. 7 - сече ние Д-Д на фиг. 5; на фиг. 8 - сече ние Е-Е на фиг. 7 ; на фиг. 9 - сече ние К-Ж на фиг. 7; на фиг. 10 - сечение И-И на фиг, 7, Кран-штабелер содержит мост 1, установленную на нем тележку 2, несущую подъемно-впускной приводной механизм 3 и колонну, состоящую из подвижных нижних секций 4 - 7 и неподвижной верхней секции 8. На секции 4 установлена каретка 9, подвижно установленная посредством пр водных винтов 10 и 11 и несущая поворотную обойму 12, через прорезь которой пропущен гибкий тяговой орга например канат 13 с крюком 14, опирающийся на поворотный блок 15. Ось 16 каната .13 совмещена с центром вр щения обоймы 12 (фиг. 9). Перемещение крюка 14 вверх ограничивается в ступом 17, упирающимся в нижний торец обоймы 12. Кроме того, на сек ции 4 ycTasiOBJjeH на оси 18 поворотн вилочный захват 19, который имеет возможность фиксироваться в несколь ких .положениях фиксатором 20. При этом крюк 14 является дополнительны грузозахватом крана. На секциях 5-8 установлены выдвижные подпружиненные пальцы 21 и 22, входящие в направляющие 23 смеж ных секций, и подпружиненные пальцы 24для фиксирования в -повернутом по ложении смежных секций. Пальцы 21 имеют возможность входить в отверст 25и 26 смежных секций и фиксироваться по выполненным.на них кольие. проточкам поворотными подпружиненными собачками 27. На секции 5 .установлен подпружиненный поворотный палец 28, с одного конца которого имеются выступы 29, имеющие возможность при вращении пальца 28 скользить по винтовым поверхностям 30 или поверхностям 31, перпендикулярным к оси пальцев 28, и входит в пазы 32 или 33. С другого конца пальца 28, имеющего возможность вхо дить в отверстие 34 секции 4, выпол нены выступы 35, взаимодействующие с пружинным упором 36, расположеннь1м на секции 4. Подъем и опускание секций 4-7 осуществляется грузоподъемным механизмом 3 с помощью каната 13, который проходит между секциями и направляющими ограничи.телями, выполненными в виде блоков 37. При этом лальпы 21 секций 6 явчяются шарнирным соединением нижних поворотных секций 4 и 5 и расположены со смещением по отношению к цродольной оси каната 13. Кран-штабелер работает следующим образом. Обычные подт-емно-траспортные операции выполняются при поднятых зафиксированных секциях, в повернутом вверх и зафиксированном вилочном захвате 19 (фиг. 4 и 5). Захват груза производитсякрюком 14, свободно висящим на канате 13 (фиг. 4, щтрихпунктирные линии), Для складирования груза в стеллажи или штабели необходимо следующее. С помощью механизма 3 поднимают крюк 14 вверх. Дойдя выступом 17 до обоймы 12, крюк, двигаясь вверх, поднимает секцию 4 до упора верхним краем в секцию 5. При этом упор 36, двигаясь вместе с секцией 4 вверх, поворачивает пальцы 28 на выступы. 35; При повороте пальца 28 его выступы 29 выходят из паза 32, перемещаются по винтовым поверхностям 30 и палец 28 выводится из отверстия 34, Затем выступы 29 западают в пазы 33 и фиксируют палец 28 в выдвинутом из отверстия 34 положении. Далее с помощью грузоподъемного механизма 3 крюк 14 опускается и вместе с ним оП-ускается под действием своего веса секция 4, скользя своими направляющими 23 по пальцам 21 и 22, установленным на секции 5. Опустившись вниз до упора, секция 4 останавливается и пальцы 21 входят в совместившиеся с ними отверстия 26 секции 4, В то же время пальцы 21 выходят из отверстий 25 секции 6, освобождая секцию 5.для перемещения вниз. При перемещении секции 5 вниз установленная на ней собачка 27, выйдя из зоны секции 6, освобо.ждается, поворачивается и фиксирует палец 21 секции 5 по его кольцевой проточке (фиг. 10, штрихпунктирные линии). Аналогичным образом опускаются вниз и фиксируются пальцами 21, которые в свою очередь фиксируются собачками 27, остальные секции. Затем поворачивают вручную или с помощью имеющегося механизма вилочный захват 19 в горизонтальное положение (фиг. 1, штрихПунктирные линии.), после чего можно выполнять складирование груза в стеллажи или штабели. Обычный подъем и опускание вилочного захвата 19 осуществляется механизмом 3, а в том случае, когда, например, требуется обеспечить более медленную скорость подъема (опускания) или более точную установку вилочного захвата 19 включают в работу механизм перемещения каретки 9 при заторможенном механизме 3. Вращая винты 10 и 11, этот механизм при неподвижной каретке, висящей на выступе 17 крюка 14, перемешают вверх (вниз) секцию 4 с вилочным захватом 19. Для выполнения специальных транспортных операций, например при передаче груза в зону соседнего пролета здания, поворачивают часть секций в горизонтальное положение. Например, для поворота секций 4 и 5 в горизонтальное положение (фиг. 1) выводят пальцы 22 секции 6 из направляющих 23 секции 5 и поднимают грузоподъемным механизмом 3 крюк 14. Пальпы могут выводиться из направляющих вручную или посредством электромагнитов (не показаны). При этом секции 4 и 5, вращаясь вокруг оси пальпа 21 секции 6, поднимаются в горизонтальное положение/ а обойма 12 поворачивает ся относительно секции 4 на оси 16, .при этом крюк 14 сохраняет свое вертикальное положение. Затем фиксируют пальцами 24 секцию 5. Для разгрузки пальцев 21 и 24, в случае подъема тяжелых грузов при повернутых в горизонтальное полож.ение нескольких секциях, канат 1-3 можно перевести в положение а (фиг . 1, итрихпунктирные линии), выведя его из блоков 37, нап ример установленных консольно, соотв свующих секций. Подъем всех секций вверх и фиксация их в верхнем положении производится следующим образом. С помощью грузоподъемного механиз 3 поднимают вверх крюк 14. Упираясь выступом 17 в обойму 12, крюк 14 под нимает секции 4-7, зафиксированные относительно друг друга пальцами 21 При этом палец 21 секции 8 выходит и отверстия 26 секции 7. В конце движения вверх секпии 7 собачка 27 на ней, встречая на своем пути секцию 8 поворачивается и выводится из кольцевой проточки пальца 21 секции 7. Дойдя до упора верхним краем в неподвижную секгию 8, секция 7 останавливается и ее палец 21 выходит из отверстия 26 секции 6, продолжающей движение вверх, и выводится в совместиви:ееся с ним отверстие 25 секции 8, фиксируя таким образом секцию 7. Аналогичным образом последовательно поднимаются и фиксируются секции 6 и 5. Секция 4 фиксируется конце ее хода вверх пальцем 28, кот рый , поворачиваясь под действием упо ра 36, входит в отверстие 34 секции 4. Затем секция 4 при движении вниз крюка 14 опускается на некоторую величину и зависает-на пальце 28, при этом пружинный упор 36, изгибаясь (фиг.6,штрчхпунктирные линии),прохо дит нижний выступ 35 и распрямляет ся. Предлагаемый кран-штабелер дае возможность, -например, поднять груз вилочным захватом 19, затем поднять дополнительный груз крюком 14 и одновременно транспортировать эти груЭы в другую зону хранения, что повышает производ.тельность подъемно-транспортных операций и расширяет технологические возможности крана-штабелера. Формула изобретения 1.Кран-штабелер, содержащий подвижный мост с тележкой, на которой закреплена телескопическая колонна с вилочным захватом, состоящая из неподвижной верхней и подвижных нижних секций, имеющих фиксаторы их крайних положений и связанных с механизмом их перемещения посредством тягового органа, отличающийс я тем, что, с целью расширения его технологических возможностей, по крайней мере одна нижняя секция колонны шарнирно связана с вьш.ерасположенной с возможностью поворота в вертикальной плоскости,-при этом на одной из нижних секций установлена каретка с поворотной в вертикальной плоскости обоймой, а тяговый орган расположен в последней, причем продольная ось тягового органа совмещена с центром вращения обоймы, а секции снабжены направляющими для тягового органа. 2.Кран-штабелер по п. 1, отличающийся тем, что. фиксаторы содержат подпружиненные пальцы, закрепленные на вышерасположенных секциях и взаимодействующие с направляющими пазами и отверстиями, выполненными в смежных нижерасположенных секциях, поворотные выдвижные пальцы с вь1ступами , взаимодействующими с направляющими элементами, расположенными на нижерасположенных секциях и имеющими винто-вую поверхность , и собачки, зак-. репленные на вышерасположенных секциях и взаимодействующие с вьщвижными пальцами . 3.Кран-штабелер по п. 1, отличающийся тем, что шарнирное соединение секций выполнено в виде подпружиненных пальцев, при этом упомянутые пальцы расположены на вышерасположенной секции со смещением относительно продольной оси тягового Органа.. 4.Кран-штабелер по п. 1, о т л ичающийс я тем, что на тяговом органе-закреплен дополнительный грузозахват. Источники информации принятые во внимание при экспертизе1. Авторское свидетельство СССГ № 727543, кл. В 65 G 61/00, 1977 (прототип).
дЗиг.1
23
(риг.З
g-B
15 / 12
LdL 15 15 / / X /
