Изобретение относится к области измерительной техники и может быть использовано при разработке и изготовлении приборов для систем стабилизации и управления вооружением объектов наземной техники.
Известна система курсокреноуказания [1], содержащая блок азимутальный, установленный в блоке горизонтальном, предназначенная для определения углов курса, тангажа и крена подвижного объекта, в которой блок горизонтальный выполнен по схеме гирогоризонта, в качестве датчиков наклонов которого применяются жидкостные маятниковые переключатели.
Наиболее близкой по совокупности признаков к предлагаемому изобретению является система курсокреноуказания [2], содержащая блок азимутальный, состоящий из внутренней рамы карданова подвеса и гироскопического чувствительного элемента, блок горизонтальный, состоящий из карданова подвеса с датчиками угла тангажа и крена. датчиками стабилизирующего момента, датчиками наклона, усилителей стабилизации, усилителей коррекции и гироскопического чувствительного элемента, имеющего две измерительные оси, образованные двумя ортогонально размещенными датчиками угла и датчиками момента, причем усилители коррекции связаны с входами датчиков момента гироскопического чувствительного элемента блока горизонтального, а выходы датчиков угла гироскопического чувствительного элемента блока горизонтального через усилители стабилизации связаны с входами датчиков стабилизирующего момента, преобразователь угол-код, принятая в качестве прототипа.
Проведенные исследования показали, что применение маятниковых жидкостных переключателей в составе системы курсокреноуказания, предназначенной для работы в системах управления вооружением наземных подвижных объектов, накладывает существенные ограничения на ее работоспособность в условиях боевой работы артиллерийских и зенитных комплексов без применения специальных внешних амортизирующих и демпфирующих устройств. При определенном уровне периодических воздействий (ударов, вибраций) на систему курсокреноуказания при выстреле происходит разбивание пузырька газа жидкостного переключателя. В результате фрагментации жидкости нарушается нормальное функционирование жидкостного переключателя, системы коррекции и происходит отклонение блока горизонтального от плоскости горизонта. Время отклонения и дальнейшее восстановление горизонтальности определяется временем восстановления жидкостного маятникового переключателя (собирания пузырька газа), которое из экспериментальных данных составляет от десятков секунд до единиц минут. Нарушение нормального функционирования датчика горизонта на указанный период времени приводит к ошибке выставки в плоскость горизонта блока горизонтального и, в итоге, к существенным ошибкам определения углов наклонов подвижного объекта.
Процесс отклонения и последующее восстановление горизонтальности блока горизонтального одновременно снижают точность хранения заданного направления блоком азимутальным. Воздействие значительной постоянной горизонтальной угловой скорости на блок азимутальный в результате наличия в гироскопическом чувствительном элементе перекрестных связей приводит к увеличению некомпенсированной скорости ухода вокруг азимутальной оси и в итоге к увеличению ошибки определения угла курса в системе управления вооружением наземного подвижного объекта при ведении огня.
Изобретение направлено на обеспечение устойчивости блока горизонтального и исключение ошибки блока азимутального при ведении огня путем устранения эффекта отклонения блока горизонтального от плоскости горизонта и связанного с ним увеличения ошибки определения углов наклонов и угла курса, повышение надежности и обеспечение работоспособности системы курсокреноуказания в жестких условиях повышенных ударных и вибрационных нагрузок, возникающих при эксплуатации гироскопических приборов систем управления и стабилизации зенитных ракетно-пушечных комплексов, бронетанковой техники в условиях их боевой работы.
Это достигается тем, что в системе курсокреноуказания, содержащей внутреннюю раму карданова подвеса с гироскопическим чувствительным элементом, выполняющих функции блока азимутального, блок горизонтальный, состоящий из карданова подвеса с датчиками угла, датчиками стабилизирующего момента, датчиками наклона, усилителей коррекции, усилителей стабилизации и гироскопического чувствительного элемента, имеющего две ортогонально размещенные измерительные оси, причем усилители коррекции связаны с гироскопическим чувствительным элементом блока горизонтального, выходы которого через усилители стабилизации связаны с входами датчиков стабилизирующего момента, преобразователь угол-код, на который поступает информация об углах курса и наклонов, в качестве датчиков наклонов используются датчики акселерометра, содержащие чувствительный элемент с датчиком угла и датчиком момента, а в систему курсокреноуказания введены усилители обратной связи компараторы, коммутаторы по количеству датчиков акселерометров, и ограничители по количеству датчиков акселерометров или более, причем выходы датчиков углов датчиков акселерометров подключены к усилителям обратной связи, выходы которых подключены к датчикам моментов датчиков акселерометров, усилителям и компараторам, выходы которых подключены к управляющим входам коммутаторов, сигнальные входы и выходы которых коммутируют ограничители в цепях датчиков моментов датчиков акселерометров.
Сущность заявляемого устройства поясняется чертежом, на котором представлена схема системы курсокреноуказания.
Блок горизонтальный системы курсокреноуказания (см. чертеж) содержит внутреннюю 1 и наружную 2 рамы карданова подвеса с датчиками угла 3, 4 и датчиками стабилизирующего момента 5, 6 по осям подвеса, усилители стабилизации 7, 8, датчики акселерометра 9, 10, конструктивно реализованные на чувствительных элементах 11, 12, датчиках угла 13, 14 и датчиках момента 15, 16, усилители обратной связи 17, 18, компараторы 19, 20, коммутаторы 21, 22, в одном из возможных вариантов исполнения - ограничители 23-26, усилители коррекции 27, 28, гироскопический чувствительный элемент 29. Усилители коррекции 27, 28 связаны с гироскопическим чувствительным элементом 29, с выходов которого сигналы подаются на усилители стабилизации 7, 8. Сигналы усилителей стабилизации 27, 28 подаются на датчики стабилизирующего момента 5, 6. Сигналы с выходов датчиков угла 13, 14 поступают на усилители обратной связи 17, 18, выходы которых соединены с датчиками момента 15, 16, компараторами 19, 20. Выходы компараторов 19, 20 подключены к управляющим входам коммутаторов 21, 22, сигнальные входы и выходы которых коммутируют ограничители 24, 26 в цепях датчиков моментов 15, 16 датчиков акселерометров 9, 10.
Блок азимутальный системы курсокреноуказания реализован внутренней рамой 1 карданова подвеса и гироскопическим чувствительным элементом 30.
Блок азимутальный обеспечивает хранение заданного направления. Сигнал об угле курса вырабатывается с помощью гироскопического чувствительного элемента 30. Сигнал угла курса поступает в преобразователь угол-код 31.
Блок горизонтальный обеспечивает стабилизацию гироскопического чувствительного элемента 30 блока азимутального относительно плоскости горизонта при работе устройства.
При отклонении осей чувствительности датчиков акселерометров 9, 10 от плоскости горизонта вследствие наклонов рам 1, 2 карданова подвеса чувствительные элементы 11, 12, представляющие собой физические маятники, отклоняются от нулевого положения.
Сигналы отклонения, снимаемые датчиками угла 13, 14, после усиления усилителями обратной связи 17, 18 поступают на датчики момента 15, 16, замыкая цепи обратной связи датчиков акселерометров 9, 10.
Ограничители 23, 25 масштабируют сигналы датчиков акселерометров 9, 10, реализуя заданный коэффициент жесткости цепи обратной связи при отсутствии линейных ускорений от ударов и вибраций со стороны объекта.
При боевой работе объекта в условиях наличия значительных линейных ускорений и вибраций сигналы с датчиков акселерометров 9, 10 могут входить в насыщение, при котором чувствительные элементы 11, 12 ложатся на упоры. В положении на упорах может возникать эффект «залипания» [3] чувствительных элементов 11, 12, при котором момента, развиваемого датчиками момента 15, 16, может быть недостаточно для возвращения чувствительных элементов 11, 12 с упоров в нулевое положение при снятии ускорений.
Для исключения эффекта «залипания» при достижении сигналами усилителей обратной связи 17, 18 уровня, при котором чувствительные элементы 11, 12 находятся около упоров, на выходах компараторов 19, 20 формируются сигналы управления, поступающие на управляющие входы коммутаторов 21, 22.
При наличии сигнала на управляющих входах с помощью коммутаторов 21, 22 в цепи датчиков моментов 15, 16 дополнительно подключаются ограничители 24, 26, обеспечивая увеличение жесткости обратной связи датчиков акселерометров 9, 10 и, соответственно, увеличение момента, прикладываемого к чувствительным элементам 11, 12, благодаря которому происходит гарантированный сход с упоров.
При прекращении действия линейных ускорений со стороны объекта (уменьшении сигналов усилителей обратной связи 17, 18 ниже заданного уровня) цепи обратной связи датчиков акселерометров 9, 10 возвращаются в исходное состояние.
Выставка в плоскость горизонта осуществляется по сигналам о величине наклона рамы 1 на выходах усилителей обратной связи 17, 18, поступающих на усилители коррекции 27, 28 и далее на гироскопический чувствительный элемент 29.
По сигналам гироскопического чувствительного элемента 29 с помощью усилителей стабилизации 7, 8 и датчиков моментов 5, 6 осуществляется стабилизация положения внутренней рамы 1 в пространстве.
Информация об углах наклона объекта относительно плоскости горизонта снимается с датчиков угла 3, 4.
Информация об углах наклонов поступает в преобразователь угол-код 31 и далее вместе с углом курса - внешнему потребителю.
По мнению авторов, применение в качестве датчиков наклонов датчиков акселерометров, содержащих чувствительный элемент с датчиком угла и датчиком момента, введение усилителей обратной связи, компараторов, коммутаторов и ограничителей в систему курсокреноуказания для достижения технического результата по обеспечению устойчивости блока горизонтального и исключению ошибки блока азимутального при ведении огня позволяет повысить точность и обеспечить работоспособность систем управления вооружением в жестких условиях повышенных ударных и вибрационных нагрузок, возникающих при боевой работе зенитных ракетно-пушечных комплексов и бронетанковой техники.
Реализация заявляемого устройства возможна на динамически настраиваемых гироскопах, волоконно-оптических, лазерных и гироскопах других типов, датчиках угла различных типов, предназначенных для преобразования угла механического поворота вала в электрический сигнал, механических датчиках момента постоянного или переменного тока, а также электронных устройствах, обеспечивающих выполнение необходимых функций по обработке информации и управления устройством. В частности преобразователь угол-код в устройстве выполняет функции преобразователя информации об углах курса и наклонов в цифровой код и интерфейсного устройства связи для передачи кода внешнему потребителю.
БИБЛИОГРАФИЧЕСКИЕ ДАННЫЕ
1. Изделие 1Т215М. Техническое описание АЮИЖ.462414.020 ТО. ВНИИ «Сигнал», г.Ковров, 1998 г.
2. Патент РФ №2171450, МПК7 С 01 С 19/38, приоритет 22.05.2000, БИ 21, 2001.
3. Баранов С.С., Зайцев И.В., Бозрикова И.Ю. Оригинальные оптоэлектронный и волоконно-оптический акселерометры // Контроль. Диагностика. - 1999. - №12. - с.22-26.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2207506C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2004 |
|
RU2274832C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2316730C1 |
| НАЗЕМНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1999 |
|
RU2165075C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КУРСА ОБЪЕКТА И САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОУКАЗАНИЯ | 2000 |
|
RU2186338C1 |
| ГИРОГОРИЗОНТ С ДИСКРЕТНОЙ СИСТЕМОЙ ГОРИЗОНТАЛЬНОЙ КОРРЕКЦИИ | 2000 |
|
RU2172473C1 |
Изобретение относится к области измерительной техники и может быть использовано при разработке и изготовлении приборов для систем стабилизации, навигации и топопривязки объектов наземной техники. Система курсокреноуказания содержит блок азимутальный, состоящий из внутренней рамы карданова подвеса с датчиком угла курса и гироскопического чувствительного элемента, блок горизонтальный, состоящий из карданова подвеса с датчиками угла тангажа и крена, датчиками стабилизирующего момента, датчиков акселерометра, содержащих чувствительный элемент с датчиком угла и датчиком момента, усилителей обратной связи, компараторов, коммутаторов и ограничителей, усилителей стабилизации, усилителей коррекции и гироскопического чувствительного элемента. Технический результат - обеспечение устойчивости блока горизонтального и исключение ошибки блока азимутального при ведении огня. 1 ил.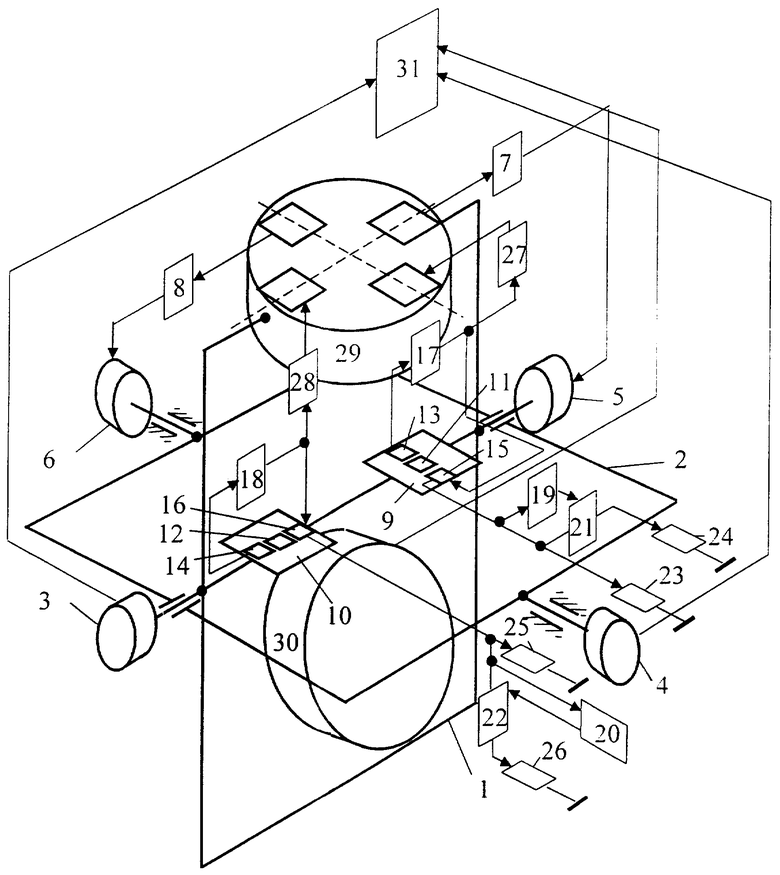
Система курсокреноуказания, содержащая внутреннюю раму карданова подвеса с гироскопическим чувствительным элементом, выполняющие функции блока азимутального, блок горизонтальный, состоящий из карданова подвеса с датчиками угла, датчиками стабилизирующего момента, датчиками наклона, усилителей коррекции, усилителей стабилизации и гироскопического чувствительного элемента, имеющего две ортогонально размещенные измерительные оси, причем усилители коррекции связаны с гироскопическим чувствительным элементом блока горизонтального, выходы которого через усилители стабилизации связаны с входами датчиков стабилизирующего момента, преобразователь угол-код, на который поступает информация об углах курса и наклонов, отличающаяся тем, что в качестве датчиков наклонов используются датчики акселерометра, содержащие чувствительный элемент с датчиком угла и датчиком момента, а в систему курсокреноуказания введены усилители обратной связи, компараторы, коммутаторы по количеству датчиков акселерометров и ограничители, причем выходы датчиков углов датчиков акселерометров подключены к усилителям обратной связи, выходы которых подключены к датчикам моментов датчиков акселерометров, усилителям коррекции и компараторам, выходы которых подключены к управляющим входам коммутаторов, сигнальные входы и выходы которых коммутируют ограничители в цепях датчиков моментов датчиков акселерометров.
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| RU 96100622 A1, 10.09.1996 | |||
| Компенсационный маятниковый акселерометр | 1989 |
|
SU1638638A1 |
| Маятниковый компенсационный акселерометр | 1985 |
|
SU1278731A1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| US 3455172 А, 15.07.1969 | |||
| GB 1299822 А, 13.12.1972 | |||
| ПЕЛЬПОР Д.С | |||
| и др | |||
| Гироскопические системы, М., Высшая школа, 1988, с.191-195 | |||
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |

