1
Изобретение относится к измерительной технике, а точнее к измерителям неэлектрических величин скорости и ускорения врёицательного движения с дальнейшим преобразованием в электрический широтно-импульсный сигнал, используемый в целях коррекции динс№шческих показателей автоматических систем разнообразного назначения.
Известен электромеханический датчик параметров вращения, содержащий статор 1Л ротор с обмотк.ами, причем обмотки ротора замкнуты на активные сопротивления: одна обмотка подключена к источнику постоянного напряжения, а другая обмотка статора подключена к выходу датчика. Известен датчик угловых ускорений, содержащий ротор с постоянным магнитом, статор с магнитопроводом и измерительной и выхЬдной обмотками, причем магнитипровод выполнен в виде двух концентрических колец, соединенных радиальными перемычками. При этом измерительная обмотка выполнена в виде двух короткозамкнутых диаметрально расположе нных секций, намотанных на внутреннее кольцо Матнитопровода и выходная обмотка намотана
на каждую секцию внешнего кольца магнитопровода. Общим недостатком этих устройств является сложность конструкции- и в особенности статора датчика, а также неудобство дальнейшего использования выходного сигнала датчика в импульсных системах. Наиболее 6.ЛИЗ.КИМ по технической сущности является импульсный датчик
0 скорости, содержащий статор в виде кольцевого магнитопровода с о6}лоткой, под1слюченной через активное сопротивление к источнику питающего напряжения, и пом ещенный внутри ста5тора ротор, выполненный в виде постоянных магнитов, укрепленных на концах плоских пружин, вторые концы которых укреплены на валу. Основным недостатком этого датчика является
0 то, что при простоте конструкции его выходной сигнал пропорционален величине скорости и не опр деляетсй ускорением вращения. Однако в ряде случаев для коррекции дина5мических показателей автоматических системнеобходим сигнал и скорости и ускорения, т.е. первая и вторая производные от угла поворота.
Целью изобретения является расши0рение функциональных возможностей
импульсного .датчика скорости и уско рения, т.е. получение информации о величине скорости и ускорения вращательного движения от одного электромеханического датчика. Указанная достигается тем, что в импульсном датчике скорости и ускорения, содержащем статор в виде кольцевого магнитопровода с обмоткой, подключенной через нагрузочное сопротивление к источнику питания, и ротор, выполненный в виде постоянных.магнитов, укреплённых на упругом подвесе, упругий подвес вьаполнен из плоских пружин, изогнутых посередине, причем плоскость одной половины пружины перпендикулярна к плоскости другой.
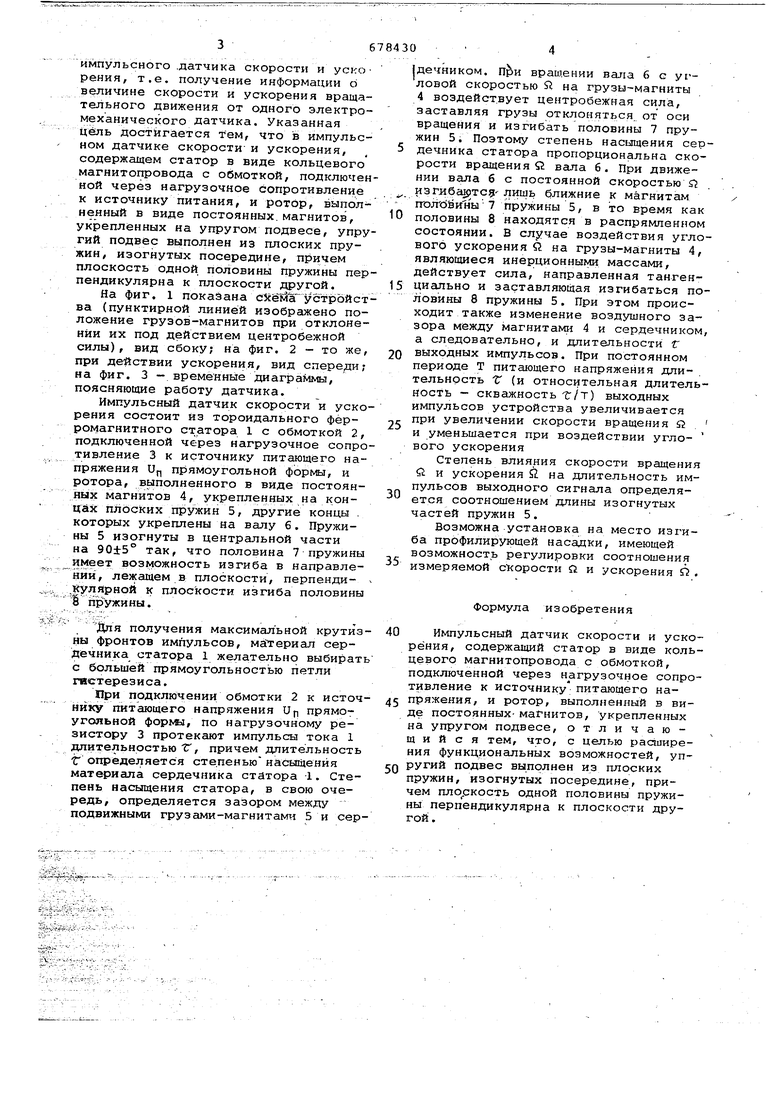
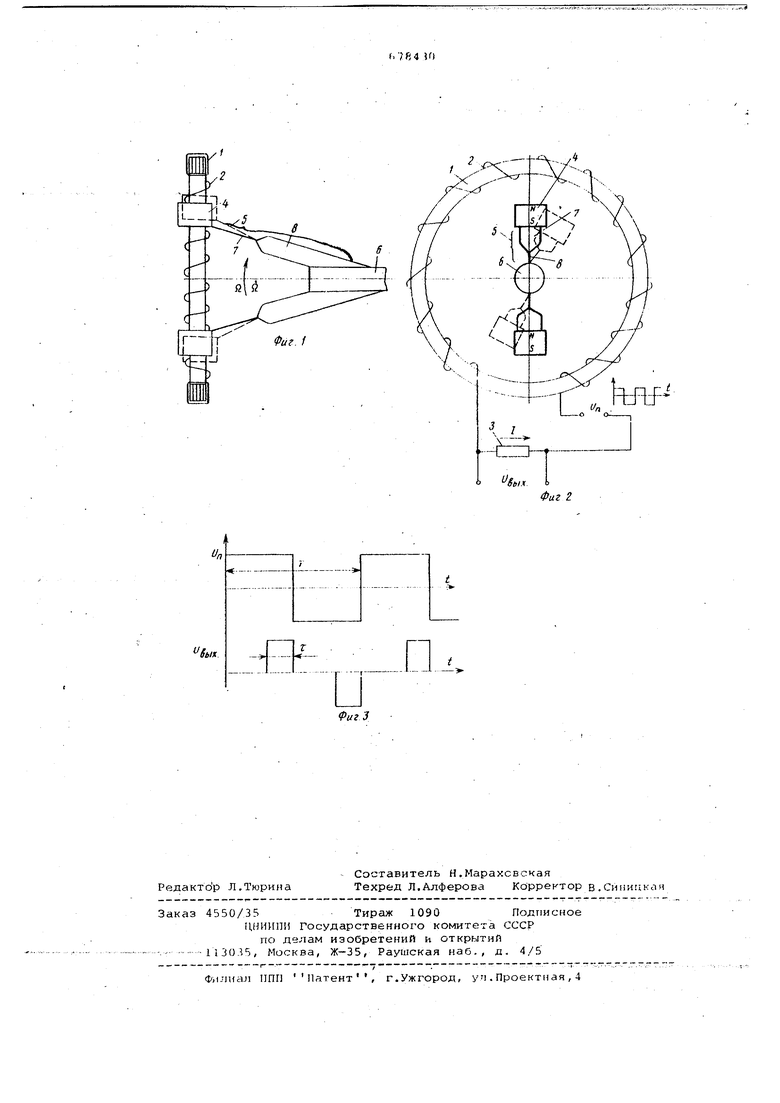
На фиг. 1 показана с5{ёма удтройства (пунктирной линией изобраокено положение грузов-магнитов при отклонении их под действием центробежной силы), вид сбоку; на фиг. 2 - то же, при действии ускорения, вид спереди; на фиг. 3 - временные диаграммы, поясняющие работу датчика.
Импульсный датчик скорости и ускорения состоит из тороидального ферромагнитного статора 1 с обмоткой 2, подключенной через нагрузочное сопротивление 3 к источнику питающего напряжения Up прямоугольной формы, и ротора, выполненного в виде постоянных магнитов 4, укрепленных на концах плоских пружин 5, другие концы . которых укреплены на валу б. Пружины 5 изогнуты в центральной части на 90±5° так, что половина 7 пружины имеет возможность изгиба в направлении, лежащем в плоскости, перпендикулярной к плоскости изгиба половины И пружины.
Для получения максимальной крутизны фронтов импульсов, материал сердечника статора 1 желательно выбират с большей прямоугольностью петли шстерезиса.
При подключении обмотки 2 к источнику питающего напряжения Up прямоугольной форглл, по нагрузочному резистору 3 протекаиот импульсы тока 1 длительностью f, причем длительность Г определяется степенью насыщения материала сердечника статора 1. Степень насыщения статора, в свою очередь, определяется зазором между подвижными грузами-магнитамт 5 и сер1дечником. враил.ении вала б с угловой скоростью Я на грузы-магниты 4 воздействует центробежная сила, заставляя грузы отклоняться от оси вращения и изгибать половины 7 пружин 5. Поэтому степень насыщения сердечника статора пропорциональна скорости вращения И вала 6. При движении вала б с постоянной скоростью fj изгиба1ртс9 лишь ближние к магнитам полС)ви11ы7 пружины 5, в то время как половины 8 находятся в распрямленном состоянии. В случае воздействия углового ускорения И на грузы-ма гниты 4, являющиеся инерционными массами, действует сила, направленная тангенциально и заставляющая изгибаться половины 8 пружины 5. При этом происходит также изменение воздушного зазора между магнитами 4 и сер.дечником, а следовательно, и длительности t выходных импульсов. При постоянном периоде Т питающего напряжения длительность Г (и относительная длительность - скважность т/т) выходных импульсов устройства увеличивается при увеличении скорости вращения Я
5 и уменьшается при воздействии углового ускорения
Степень влияния скорости вращения и и ускорения Я. на длительность импульсов выходного сигнала определя0ется соотношением длины изогнутых частей пружин 5.
Возможна установка на место изгиба профилирующей насадки, имеющей возможность регулировки соотношения
5 измеряемой скорости Я и ускорения 57 .
Формула изобретения
Импульсный датчик скорости и ускорения, содержащий статор в виде кольцевого магнитопровода с обмоткой, подключенной через нагрузочное сопротивление к источнику питающего напряжения, и ротор, выполненный в виде постоянных- магнитов, укрепленных на упругом подвесе, отличающийся тем, что, с целью рааиирения функциональных возможностей, упругий подвес выполнен из плоских пружин, изогнутых посередине, причем пло :кость одной половины пружины перпендикулярна к плоскости другой .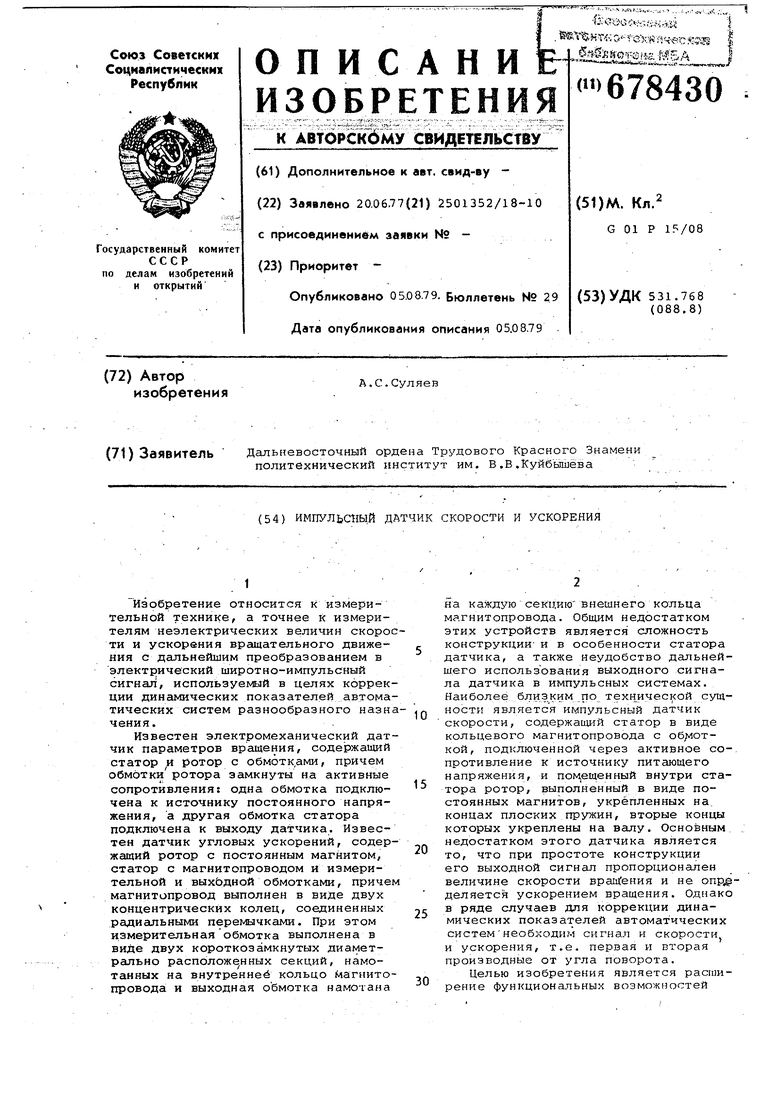
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛОВЫХ УСКОРЕНИЙ | 1997 |
|
RU2121146C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| ОСЕВОЙ КОМПЕНСАЦИОННЫЙ ЦИФРОВОЙ АКСЕЛЕРОМЕТР С НЕКОНТАКТНЫМ ПОДВЕСОМ ИНЕРЦИОННОЙ МАССЫ | 1997 |
|
RU2128345C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ПОГРУЖНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2011 |
|
RU2463612C1 |
| Датчик положения ротора | 1979 |
|
SU817895A1 |
| ЭЛЕКТРОПРИВОД ДЛЯ ТРАНСПОРТА | 2008 |
|
RU2399148C1 |
| Дисковый насос | 2019 |
|
RU2716100C1 |
| ДАТЧИК УГЛОВЫХ УСКОРЕНИЙ | 1972 |
|
SU420936A1 |
| УНИВЕРСАЛЬНЫЙ НЕКОНТАКТНЫЙ ГИРОСКОП | 2013 |
|
RU2521765C1 |
SbiK
.П.,
