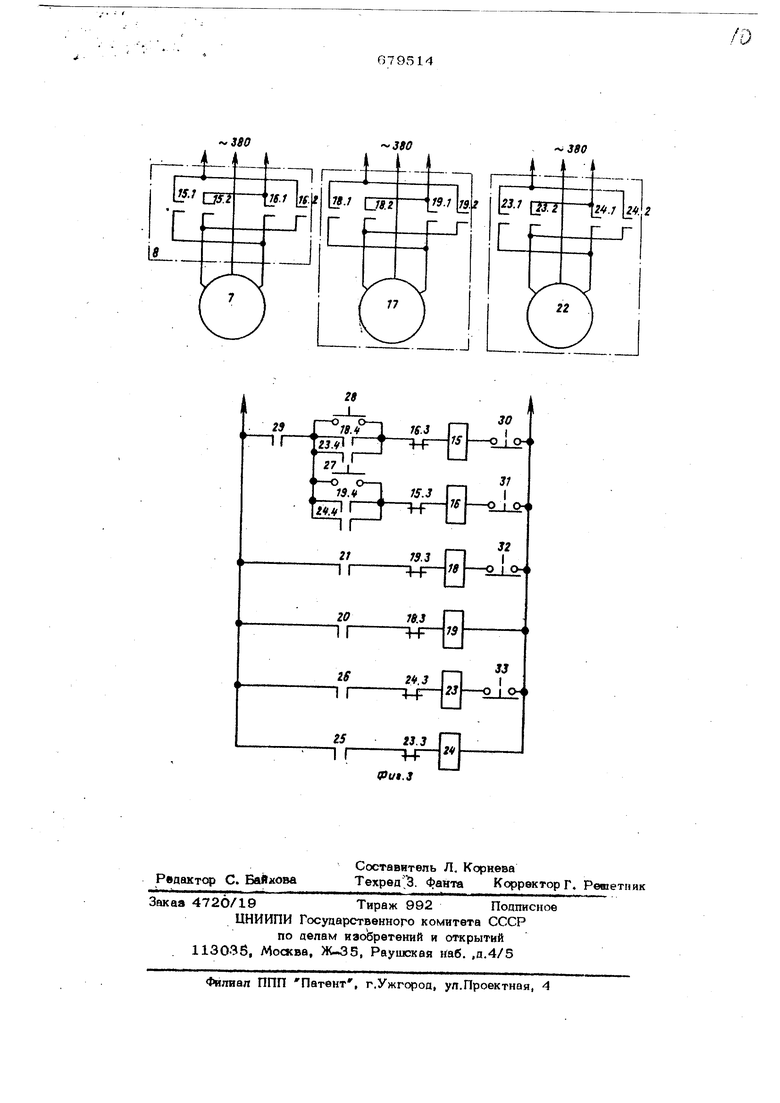
Изобретение относятся к.области подъемно-транспортной техники, а именно к устройствам для управления поворотом кабины грузоподъемного крана, в частности кабины стрелового самоходного крана Известно устройство для управления поворотом кабины грузоподъемного крана содержащее механизм поворота кабины с двигателем, блок управления которого соединен со следящим блоком ClJ. Это устройство недостаточно полно обе спечивает упобные условия труда машиниста. Привод механизма поворота кабины связан лишь с механизмом передвижения тележки, поэтому поворот кабины осуществляется синхронно только с перемещениеми тележки в горизонтальной плоскост в то время как. груз меняет положение и повысоте. Целью изобретения является расширение функциональных возможностей устройства. Цель достигается тем, что следяишй блок содержит датчик угла наклона стрелы и высоты подъема груза, и подключенный к их выходам пороговый исполнитель ный блок, при атом блок управления двигателем мехаш1зма поворота имеет дополнительные входы для связи с элементами управления приводами грузовой лебедки истрелы. На фиг. 1 схематически изображена кабина крана в повернутом положении и разделение поастрелового пространства на зоны наблюдения за грузом; на фиг. 2 - структурная схема управления привоаом механизма поворотов; на фиг. 3 - принципиальные электрические схемы предлагаемого устройства; Корпус 1 кабины (фиг. 1) посредством шарнира 2 соединен с поворотной платформой 3 грузоподъемного, крана со стрелой 4 и закрепленным ни нем грузом 5. Кабина снабжена механизмом 6 поворота. Двигатель 7 (фиг.2) механизма 6 поворота снабжен блоком 8 управления, входы которого поцключены соответственно к следящему блоку 9 и элементам 1О, 11 управле.ния приводами грузовой лебедки иг стрелой. Слепящий блок 9 состоит из цагчика 12 положения груза и аатчика 13 угла наклона стрелы 4, подключенных своими выхоаами к пороговому исполнительному блоку 14, выход которого является выходом сдепящего блока 9. Датчик 12 и 13 механически связаны с элементами 10, 11 соответственно. Блок 8 управления соаержит реверсивные пускатели 15, 16 с контактами 15.1, 15,2 и 16.1, 16.2, включенными в цепь питания авигателя 7, и контактами 15. 3 16. 3 в цепи гштания реверсивных пускателей соответственно 16 и 15. Двигатель 17 грузовой лебедки управляется реверсив ными пускателями 18, 19с контактам и 18.1, 18.2, 18.3, 18.4 и 19.1, 19.2, 19.3 и 19.4. Контакты 18.1, 18.2 и . 19.1, 19.2 вкючены в цепь питания ави- гателя 17, а контакты 18.3 и 19.3 соответствейно - в цепи питпния пускателей 19 и 18 последовательно с контактами 20, 21 ручного управления двигателем 17 грузовой лебедки, двигатель 22 стрелы управляется реверсивными пускателями 23 24,0 контактами 23.1, 23.2, 23.3, 23.4, 24.1, 24.2, 24.3, 24.4. Контакты 23.1, 23.2, 24;1 и 24.2 включены в непь питания пвигатепя 22, а 23.3 и 24.3 - в цепь питания пускателей 24 и 23. Устройство содержит также контакты 25, 26 ручного управления. Контакты 23.4 и 24.4 вкючены в цепь питания пускателей 15 и 16 параллельно с контактами 18.4, 19.4 и кнопками 27, 28 ручного управления и послеловательно С контактом 29 исполнительного блока 14 и конечным выключателем ЗО положения гру.за Конечные выключатели 31, 32, 33 включены последовательно с пускателями 16, 18,. и 23 сгютветственно. УстроГство.для управления поворотом кабины работает следующим образом. Рассмотрим вариант, когда стрела, 4 крана установлена в зоне неудобного наблюдения, а груз 5 находится в зоне удобного наблюдения. Работает привод лебедки груза на подъем, поэтому контакт 18.4 замкнут. С изменением высоты подъема груза 5 датчик 12 выдает сигнал на исполнительный блок 14. Когда груз 5 будет поднят выше условной границы зон, сигнал датчи .ка 12 постигнет порогового значения, и исполнительный блок 14 замыкает контак 29 (фиг.З). Включается привод 7 механи-..,, эма 6 поворота кабины, и последняя пово-« рачивается в вертикальной плоскости вокруг шарнира 2 синхронно с подъемом гру- за. С выключением электродвигателя 17 привода лебедки груза размыкается контакт 18.4, отключая двигатель 7. Кабина прекращает поворот. Если включить электродвигатель 17 или электродвигатель 22 на спуск ,, то замкнутся соответствующие м контакты 23.4 или 24.4. Поскольку контакт 29 замкнут, включается двигатель 7. С уменьшением угла наклона стрелы и высоты расположения груза уменьшают величину тока, протекающего через исполнительный блок 14. Когда груз опустится ниже условной границы зон, величина тока будет ниже значения тока срабатывания, контакт 29 разомкнется и двигатель 7 включится. К этому времени кабина крана будет находиться в исходном положении. Таким образом, исполнительный блок 14 держит контакт 29 замкнутым лишь при расположении груза в зоне неудобного наблюдения за грузом. Двигатель 7 механизма 6 поворота кабины на этом участке будет включаться посредством одного из контактов 18.4, 19.4 или 24.4, замыкающихся с включением соответствующих электродвигателей 17 или 22. Указанные контакты замыкаются также при расположении груза в зоне удобного наблюдения, но кон.-, такт 29 в этом случае разомкнут и двигатель 7 не включается. С.помощью контактов 28 и 27 осуществляется ручное включение двигателя 7, когда груз находится в зоне неудобного наблюдения, а двигатели 17 и 22 включены (контакт 29 в этой зоне замкнут). Контакты 30 и 31 служат для отключения двигателя 7 в крайних положениях кабтгы. Формула изобретения Устройство для управления поворотом кабины грузоподъемного крана, содержащее механизм поворота кабины с двигателей блокуправления которого соединен со спедящим блоком , отличающееся тем, что, с целью расширения функциональных возможностей, следящий блок содержит датчики наклона стрелы и высоты подъема груза и подключенный к их выходам пороговый исполнительный блок, при этом блок управления двигателем м&ханизма поворота снабжен дополнительными входами для свя- зи с элементами управления приводами грузовой лебедки и стрелы. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР №411027, кл. В 66 С 13/82, 1972 (прототип).
Зона неудоднао наблюдения
Зона удобного наблюдения
И i I
iput.Z
3fO
380
380
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением кабины подъемника | 1984 |
|
SU1355581A1 |
| Механизм поворота кабины управления крана | 1976 |
|
SU573435A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| СПОСОБ УПРАВЛЕНИЯ БАШЕННЫМ КРАНОМ В АВАРИЙНОЙ СИТУАЦИИ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2001 |
|
RU2245838C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2343103C2 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2006 |
|
RU2322382C1 |
| Устройство для автоматического регулирования температуры в вагонах рефрижераторного поезда | 1980 |
|
SU1004162A1 |
| Деррик-кран | 1989 |
|
SU1775351A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| Система управления стреловым краном | 1974 |
|
SU520318A1 |