Целью настоящего изобретения является повышение точности устрой ства при одновременном упрощении эксплуатации и повышении производительности экскаватора.
Поставленная цель достигается тем, что в устройство введены датчики направления вращения, кольцевой расгфеделитель, элементы И, ИЛИ-НЕ, ключи, задатчикн нулевого положения и крутизны траектории ковша, 1фограммный блок и последовательно соединенные блок синхронизации, реверсивнь1й счетчик, преобра.ррватель код-аналог, выход которого через первый ключ соединен с приводом тяги, выход первого датчика направления вращения подключен к одним входам блока синхрониза Ции, другие входы которого через второй н третий ключи соединены с выходом второго датчика направления вращения и входом кольцевого распределителя, выходы задагчшса крутизны траектории ковща подключены к первым входам элементов И, вторые входы которых соединены с выходом кольцевого распределителя, а выходы - со входом элемента ИЛИ-НЕ, выходы которого подключены ко вторым входам второго и третьего ключей, задатчик нулевого положення подсоединен ко входу реверсивного счетчика, с другим -входом котсфого соединен программный блок, а входы датчиков направления вращения подключены к выходам датчиков перемещения 1фиводов тяги и подьема.
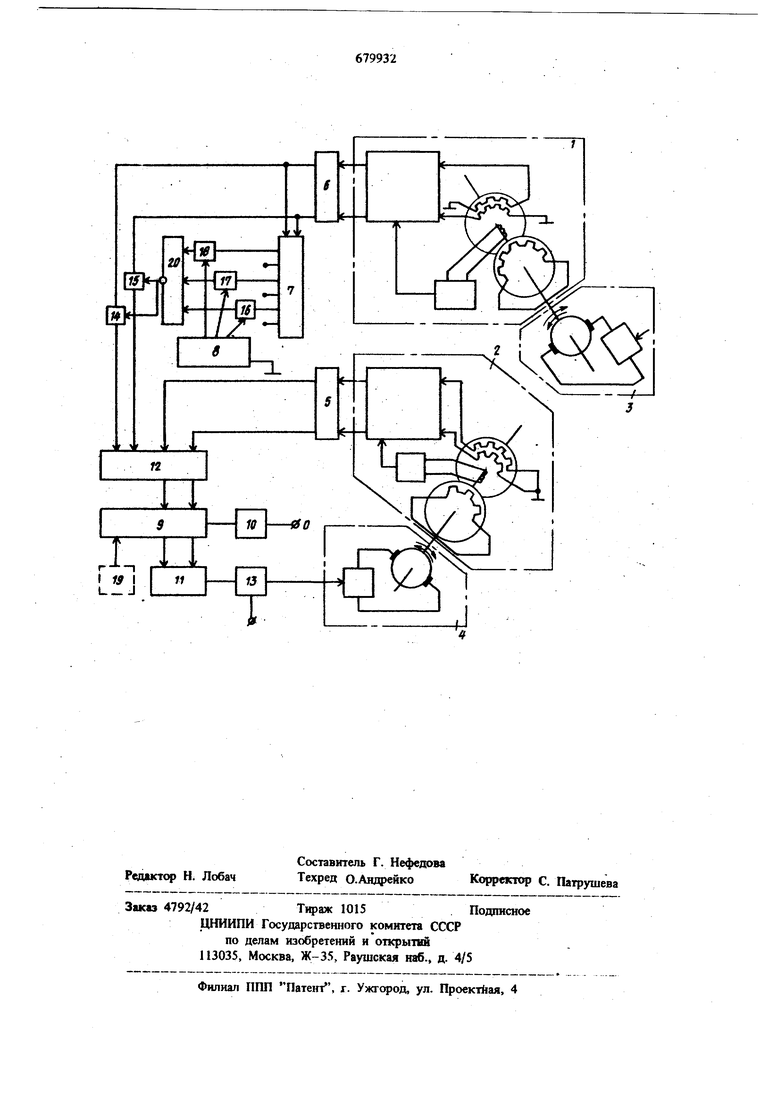
На чертеже изображена схема предлагаемого устройства.
Устройство содержит импульсные датчики 1 и 2 перемещения приводов подъема и тяги, приводы 3, 4 подьема и тяги, датчики 5 и 6 направления вращения, кольцевой распределитель 7, задатчик 8 крутизны траектории, реверсивный счепнк 9, задатчик 10 нулевого положения, преобразователь И код-аналог, блок синхронизации 12, ключи 13 - 15, элементы И 16 - 18, программный блок 19, элемент ИЛИ-НЕ 20.
Выход импульсного датчика 2 перемещения привода тяги соединен через датчик S направления вращения с блоком синхронизации 12, который гфедиазначен для разделения во времени двух импульсов и исключения возникновения ошибки в результате их наложения.
Выход нмпульсиого датчика 1 перемещения привода подьема соединен с датчиком 6 напра ления вращения. Выходные цепи датчика 6 подключены к реверсивному кольцевому распределителю 7 и через ключи 14 и 15 - к блоку синхронизации 12. Реверсивный кольцевой распределитель 7 обеспечивает последовательное распределение входньк импульсов по своим выходным цепям.
Управляющие цепи ключей 14 и 15 соединены с выходом элемента ИЛИ-НЕ 20, на вход котфого подключены через элементы И 16-18 три четных выхода реверсивного кольцевого распределителя 7. Вторые входы элементов И 16-18 подключены к задатчику 8 крутизны траектсфнй, который имеет четыре фиксированных положения О, 1 2 и З и предназначен дам подачи оперного напряжения на элементы И, причем в зависимости от того,. в каком из четырех положений установлена . ручка задатчика 8, подключается определенная группа элементов И. Импульод с датчика 1 поступают на вход блока синхронизации 12 только в том случае, если ключи 14 и 15 открыты. Если ручка задатчика 8 находится в положении О, то ни один из трех элементов И не пропускает импульсы с распределителя 7 на входы элемента ИЛИ-НЕ 20, на выходе которого в этом случае имеется сигнал, а следовательно ключи 14 и 15 открыты, и все импульсы 1ФОХОДЯТ на вход блока синхронизации 12. Если ручка задатчика 8 находится в положении 1 , то каждый второй импульс из шести обеспечивает появление на выходе элемента И 18 сигнала, который попадает на элемент ИЛИ-НЕ 20, а следовательно ключи 14 и 15 закрываются. Таким образом, в этом случае каждый второй импульс из шеспс не попадает на вход блока синхронизации 12.
При установлении ручки задатчика 8 в положение 2каждый вт(фой и четвертый импульс из шести обеспечивает соответственно появление сигнала на выходе элементов И 17 и 18, а следовательно - запирание ключей 14 и 15. Таким образом, каждый второй и четвертый импульс из шести не попадает на вход блока синхронизации 12. Если ручка задатчика 8 находится в положении 3, то каждый , четвертый и шестой имульс из шести обеспечивает соответственно появление сигнала на выходе элементов И 16-18, а следовательно - запирание ключей 14 и 15, т.е. каждый второй четвертый н шестой импульс из шести не попадает на вход блока синхронизации 12, т.е. половина импульсов с датчика 1 не попадает на вход блока синхронизации 12.
Выходы блока синхронизации 12 соединены со входами реверсивного счетчика 9 импульсов представляющего собой блок суммирования. Рев ивный счетчик 9 имггульсов предназначен для алгебраического суммирования импульсов, поступающих с датчиков 1 и 2, и имеет задатчик 10 нулевого положения, установленный в кабине на пульте управления машиниста и предназначенный, для задания положения траектория подьема ковша в рабочей зоне относнtejibHo стрелы путем установки нулевого (ис Ходаого) состояния счетчика 9, осуществляемой подачей нулевого потенциала на его вход. Выход реверсивного счепика 9 соединен со входом преобразователя 11 код-аналог, предназначенного для 1фео6разования числа импульсов счетчика 9 в соответствующее напряжение. Выходные цепи 1феобразователя 11 соединены с управляющими цепями привода тяги 4 ключ 13. Устройство работает следующим образом. С помощью задагшка 10 нулевото положеиия определяется положение траектории подъема относнтелыю стрелы и устанавливается нулевое состояние ревфсивного счепика 9 имЬульсов. Крутизна траектсфин подъема ковша задается с помощью задатчика 8 крутизны траект(фии, котсфый расположен на пульте управления. Для зтого ручка задатчика 8 крутизны траекюрия устанавливается в одно из четьфех фиксированных положений. С увеличением порядкового номфа положения увеличивается крутизна траектории. В иачале цикла подъема ковща тфивод 3 подъема включается на максималъную ск фостъ и с помощью ключа 13 замыкается цепь выхода преобразователя 11 код-аналог с управляющими цепями привода 4 тяги. В процессе подъема ковща устройство автоматически обеспечивает движеиие ковща по выбранной траектории без вмешательства мащиниста. При откло иении ковща от заданной траектории, что возможно при уменьщении длины подъемното каната (привод 3 подъема обеспечивает подъем ковща), либо 1ФИ измеиении ск(ости изменения длины подъемного каната, выходные сигналы на выходе рев сивного счетчика 9 обеспечивают появлешсе выходного сигнала с 1феобразователя 11 код-аналог. Этот сигнал поступает в утфавляющие цепи привода 4 тяги, который, изменяя длину тягового каната, возвращает ковщ на заданную траекторию. Чем далъше уйдет ковщ с заданной траектории, тем болъщий по величине сигнал будет подаваться на )гправляющне цепи привода 4 тяги. Устройство может угфавлять приводом 4 тяги по определенной щюграмме, для чего реверсивнъш счетчик 9 имлулъсов соединяется с программным блоком 19. Таким образом, предлагаемое устройство обеспечивает автоматический процесс по заданной мацоогастом траектории. Использование предлагаемого устройства для управления злектроприводами ковща драглайна позволяет по сравнению с существующими устройствами получитъ более высокую точность работы устрсжства за счет примеиения дискретных злементов; упроститъ эксшгуатащоо за счет сведения 1фактически к мииимуму пер.еваладочных работ, а также за счет использования дискретных устройств, не требуют сложного ухода в эксплуатация, и обеспечить максимальную проиэ1Ьодительность мацшны за счет того, что длительность цикла транспсфтировки не зависит от точки отрыва, а также за счет максимального использования возможностей мащины иезависимо от условий работы. Формула изобретения Устройство для управлення приводами ковща зкскаватора, содержащее датчикн п емещеинй приводов подъема и тягн, соединенные с приводами подъема и тяги соответственно, о тл и чающееся тем, что, с целъю повыщения точности устройства, в него введены датчнкн направления вращения, кольцевой распределитель, злеменлм И, ИЛИ-НЕ, ключи, задатчики нулевого положения н крутизны траектории ковща, программный блок и последовательно соединенные блок синхронизации, реверсивный счетчик, преобразователь код-аналог, выход которого через первый ключ соединен с приводом тяги, въ1ход первснх) датчика направления вращения подключен к одним входам блока синхронизации, другне входы которого через второй и третий ключи соеданены с выходом втсфого датчика направления вращЬния и входом кольцевого распределителя, выходъ задатчика крутизны траектории ковща подключены к пфвым входам элементов И, вторые входы которък соединены с выходом кольцевого распределителя, а выходы - со входом элемента ИЛИ-НЕ, выходы подключенъ ко вторым входам второго и третьего ключей, задатшк нулевого положения подсоединен ко входу реверсивного счетчика, с другим входом котсфого соединен программный блок, а входы датчиков направления вращення подключены к выходам датчиков перемещения гфиводов тяги и подъема. Источники информации, принятые во внимание при экспертизе 1.Слежановский О. В. и др. Устройства унифицированной блочной системъ регулирования дискретного типа, Энергия, ,1975, 2.Тнхобаев В. М. Схемы автоматического управлення оптацией переноса грунта в отвал для экскаваторов типа драглайн, в сб. Совершенствование шфаметров производственных процессов на открытых разработках, , ЦНИИТЭИугля, 1964, с. 15-21.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления драглайном | 1977 |
|
SU682607A1 |
| Устройство управления приводами ковша экскаватора | 1984 |
|
SU1249475A1 |
| Способ сварки и устройство для его осуществления | 1987 |
|
SU1555080A1 |
| Устройство для сварки | 1987 |
|
SU1555078A1 |
| Устройство для учета количества пассажиров | 1990 |
|
SU1795486A1 |
| Электропривод с частотно-токовым управлением | 1991 |
|
SU1836804A3 |
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| Устройство для позиционного управления роботом-манипулятором | 1976 |
|
SU636076A1 |
| Формирователь многофазного напряжения | 1981 |
|
SU980273A1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1462234A1 |