«12
Изобретение относится к строитель- ио-дорожной технике и предназначено ля управления движением ковша экска- ватора-драглайна, и может быть исользовано для управления другими троительными маигинами и механизмаи, например, погрузчикайи, транспорерами и т.п.
Цель изобретения - повышение точности устройства.
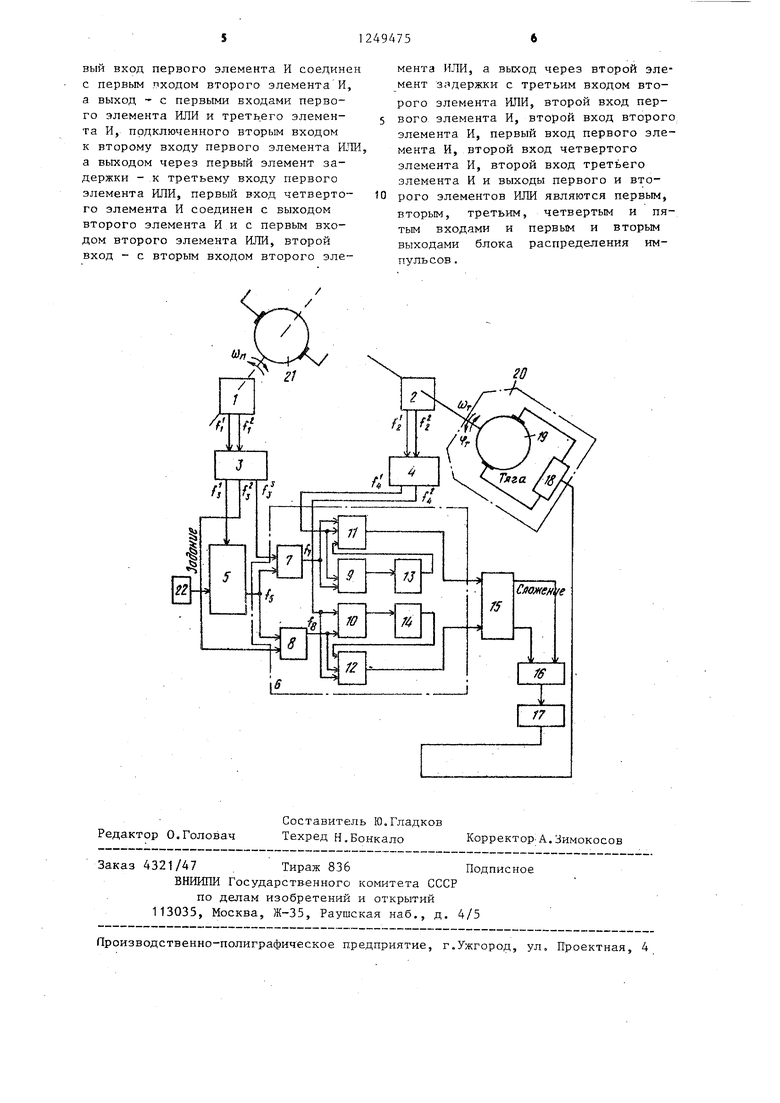
На чертеже представлена блок-схема предлагаемого устройства.
Устройство содержит первый 1 и втоой 2 импульсные датчики перемещения, первый 3 и второй 4 датчики направления вращения, делитель 5, блок 6 распределения импульсов, элементы И 7-10, элементы ИЛИ 11 и 12, элементы 13 и 14 задержки, блок 15 синхронизации, реверсивный счетчик 16, преобразователь 17 код-аналог, усилитель 18 мощности, электродвигатель 19, приводы 20 и 21 соответственно тяги и подъема, задатчик 22 крутизны
траектории ковша. При этом Ч , ,
и т
ijj, uJ - углы поворота и угловые скорости соответственно приводов 20 и 21 тяги и подъема, f . - сигнал на i-м выходе j-ro функционального элемента или блока, fj- - выходной сигнал j-ro функционального элемента или блока.
В состав блока 6 распределения импульсов входят элементы И 7-10, элементы ИЛИ 11 и 12 и элементы 13 и 14 задейжки.
В состав привода 20 тяги входят усилитель 18 мощности и электродвигатель 19.
Устройство работает следующим образом.
При движении ковша экскаватора на траекториях подъема и опускания по желанию машиниста может осуществляться изменение направления движения ковша, что происходит в результате перемены направления движения приводов 20 и 21 соответственно тяги и подъема. В зависимости от направления вращения приводов 20 и 21 тяги и подъема одна из импульсных последовательностей , f или f , f на выходах импульсных датчиков 1 и 2 перемещения опережает другую последовательность на 90° (на 0,5 шаг а кодирования, например, при вращении привода 21 подъема против часовой стрелки. Последовательность опе7:;2
режает f -, Датчики 3 и -4 направления вращения вьтолняют следующие функции: учетверяют число импульсов, поступающих с выходов импульсных датчиков 1 и 2 перемещения с помощью специальных умножителей частоты (не показаны) , преобразуют полученные импульсные сигналы в импульсы требуемой длительности, определяют направление
вращения приводов 20 и 21 тяги и подъема и формируют н а своих выходах в зависимости от направления вращения импульснь е последователь7 2
ности f J или f, и f или f , при опережающей последовательности f, на входе датчика 3 направления вращения на его выходе появляется выходная импульсная последовательность f
Делитель 5 уменьшает частоту нейтральной импульсной последовательности f на каждом выходе датчика 3 направления вращения в соответствии с принятым в данном устройстве алгоритмом управления
S &E(1-k)- лЕ,,
где S - рассогласование между задан- ным и действительным положениями ковша при его движении ПС - траектории;
л изменения длин канатов подъема и тяги, которым пропорцио- нальны числа импульсов последовательностей f , f, и
f f
i 1
- коэффициент задания траектории ковша экскаватора, уста- навливаемый машинистом с помощью задатчика 22 крутизны траектории ковша путем изменения его выходного сигнала Задание траектории.
Делитель 5 работает как частотньй модулятор и преобразует в соответствии с сигналом Задание траектории и числом К ,представленным в параллельном потенциальг1ом двоичном коде, входную нейтральную последовательность импульсов f в выходную последовательность f, формуле
k f,.
причем f служит в делич еле 5 эталонной импульсной последовательностью, верхняя час ; отл которой соот31
ветствует наибольшей скорости вращения привода 21 подъема экскаватора.
Блок 6 распределения импульсов и блок 15, синхронизации служат в системе для разделения во времени импульсов всех встречаюпщхся в процессе работы экскаватора импульсных последовательностей в каналах подъема и тяги: f , f , f и f , f . При этом импульсные последовательности f , f , соответствующие разным направлениям вращения привода 21 подъема, подаются вместе с нейтральной импульсной последовательностью f, частота которой уменьшена в соответствии с коэффициентом к. делителя 5 на входы элементов И 7 и 8 блока распределения импульсов, а их выходные сигналы поступают на входы элементов И 9 и 10, включенных последовательно с элементами 13 и 14 задержки и на входы элементов ИЛИ 11 и 12. Выходные сигналы f и fg элементов И 7 и 8 и датчика 4 направления вращения f и f проходят на входы блока 15 синхронизации через элементы ИЛИ 11 и 12. Однако в том случае, когда импульсы последовательностей f, и f или fg, f совпадают друг с другом по времени, т.е. возникает возможность пропадания одного импульса, поступающего на один из входов блока 15 синхронизации, и как следствие, уменьшается точность работы устройства, в блоке 6 распределения импульсов предусмотрено дополнительное разделение по времени этих импульсов с помощью элементов И 9 (или 12) и элемента 13 (14) задержки
Далее на выходе блока 15 синхронизации разделенные по времени импульсы в зависимости от направлений вращения приводов 20 и 21 тяги и подъема и в соответствии с принятым в устройстве алгоритмом управления поступают на входы Сложение или Вычитание реверсивного счетчика 16 В преобразователе 17 код-аналог осуществляется преобразование кода на выходах реверсивного счетчика 16 в напряжение постоянного тока, пропорциональное количеству импульсов, поданных на входы реверсивного счетчика 16. В общем .случае выходное напряжение преобразователя 17 код-аналог, подаваемое через усилитель 18 мощности на электродвигатель 19 привода 20 тяги, является функцией ин754
теграла разност.и частот fj (fj) и f (f), а знак этого интеграла определяется неравенствами f (f, )
.f(f ) и fj з ) fj (f. выполняются в зависимости от того,
какие из последовательностей имеют место в рассматриваемьй момент движения ковша. Устрой во управления приводами ковша экск:г1.; .:й1тора построено на основе некоторых отдельных
элементов таких блоков систеког регулирования дискретного типа УьиР-Д, что унифицирует построение всего устройства управления и упрощает его
конструкцию.
Формула изобретения,
1. Устройство управления приводами ковша экскаватора, содержащее за- датчик крутизны траектории ковша, первый импульсный датчик перемещения, кинематически связанный с приводом подъема ковша и соединенный
выходами с соответствующими входами первого датчика направления вращения, подключенного выходами соответственно к первому и второму входам блока распределения импульсов, второй импульсный датчик перемещения, кинематически связанный с приводом тяги ковша и соединенный выходами с со- ответствуюшдми входами второго датчика направления вращения, блок синхронизации, подключенный выходами к соответствующим входам реверсивного счетчика, соединенного выходом с входом преобразователя код-аналог, отличающееся тем, что,
с целью повышения точности устройства, оно снабжено делителем, соединенным первым входом с выходом за- датчика крутизны траектории ковша, вторым входом - с третьим выходом
первого датчика направления враще- НИН, а выходом - с третьим входом блока распределения импульсов, подключенного четвертым и пятым входами соответственно к первому и второму
выходам второго датчика направления вращения, а первым и вторым выходами - соотв етственно к первому и второму входам блока синхронизации. 2, Устройство по П.1, о т л и чаю щ. веся тем, что блок распределения импульсов содержит четыре элемента И, два элемента ИЛИ и два элемента задержки, причем первый вход первого элемента И соединен с первым пходом второго элемента И, а выход с первыми входами первого элемента ИЛИ и третьего элемента И, подключенного вторым входом к второму входу первого элемента ИЛИ а выходом через первый элемент задержки - к третьему входу первого элемента ИЛИ, первый вход четвертого элемента И соединен с выходом второго элемента И и с первым входом второго элемента ИЛИ, второй вход - с вторым входом второго эле
мента ИЛИ, а выход через второй элемент з;1держки с третьим входом второго элемента ИЛИ, второй вход первого элемента И, второй вход второго элемента И, первый вход первого элемента И, второй вход четвертого элемента И, второй вход третьего элемента И и выходы первого и второго элементов ИЛИ являются первым, вторым, третьим, четвертым и пятым входами и первым и вторым выходами блока распределения им- пуль сов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводами ковша экскаватора | 1976 |
|
SU679932A1 |
| Устройство для управления драглайном | 1977 |
|
SU682607A1 |
| Устройство для измерения и контроля углов поворота платформы экскаваторадраглайна | 1978 |
|
SU747943A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Устройство для измерения работы экскаватора-драглайна | 1976 |
|
SU634232A1 |
| Устройство для управления конвейерной линией | 1979 |
|
SU876525A1 |
| Цифровой электропривод | 1983 |
|
SU1102002A1 |
| Устройство для учета работы транспортного оборудования | 1981 |
|
SU1059072A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Радиотелеметрическое устройство контроля и учета работы шагающего экскаватора | 1987 |
|
SU1472573A1 |
Изобретение относится к строительно-дорожной технике и предназначено для управления движением ковша экскаватора-драглайна,но может быть использовано для управления другими строительными машинамии механизмами,на- пример погрузчиками,транспортерами и т.п.Целью изобретения является повьш1е- ние точности ус тройства.Направление вращения привода подъема фиксируется первым импульсным датчиком перемещения и на его выходах формируются две сдвинутые одна относительно другой на 90 импульсные последовательности. Эти импульсные последовательности учетверяются в первом датчике направления вращения и в нем также формируется опорная последовательность. Частота опорной последовательности в делителе делится на коэффициент задания траектории ковша экскаватора, задаваемый машинистом. Остальные импульсные последовательности с выходов первого датчика направления вращения поступают на первый и второй входы блока распределения импульсов. Импульсная последовательность с выхода делителя поступает на третий вход блока распределе«ия импульсов. Направление вращения привода тяги фиксируется вторым импульсным датчиком перемещения и на его выходах формируются две сдвинутые одна относительно другой на 90 импульс-ные последовательности. Эти импульсные последовательности учетверяются во втором датчике направления вращения и с его выходов поступают на четвертый и пятый входы блока распределения импульсов, а с его выходов - на первый и второй входы блока синхронизации. Сигналы с первого и второго выходов блока синхронизации поступают на входы Суммирование и Вычитание реверсивного счетчика, а с его выхода через преобразователь код-аналог - на вход усилителя мощности. Усилитель мощности воздействует на электродвигатель привода тяги. 1 з.п. ф-лы, 1 ид. о (Л ел
Редактор О,Головач
Составитель Ю.Гладков Техред Н.Бонкало
Заказ 4321/47 . Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
Корректор А.Зимокосов
| Рози А.А | |||
| и Федотов А.И | |||
| Числовые системы программного управления машинами и агрегатами | |||
| - Л.; Лениз- дат, 1973, с, 42-44 | |||
| Устройство для управления приводами ковша экскаватора | 1976 |
|
SU679932A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
