РО
ратной связи к-рого соединен с датчи ком тока. Выход Р тока подключен к входу блока импульсно-фазового управ ления УВ. С помощью блока коррекции формируется переменная составляющая тока статора, компенсируютдая пульсации электромагнитного момента на малых частотах вращения, вызванные дис кретностью АИ тока. На больших часто
64289
тах вращения действие блока коррекции исключается сПомощью РО напряжения, в котором реализуется соотношение U|, jU,j/coj WQ/, где U,2 и U, - сигналы ца выходах блока коррекции и РО напряжения, 01 - текущая частота вращения АД, WQ - частота вращения АД, соответствующая идеальному холостому ходу. 3 ил.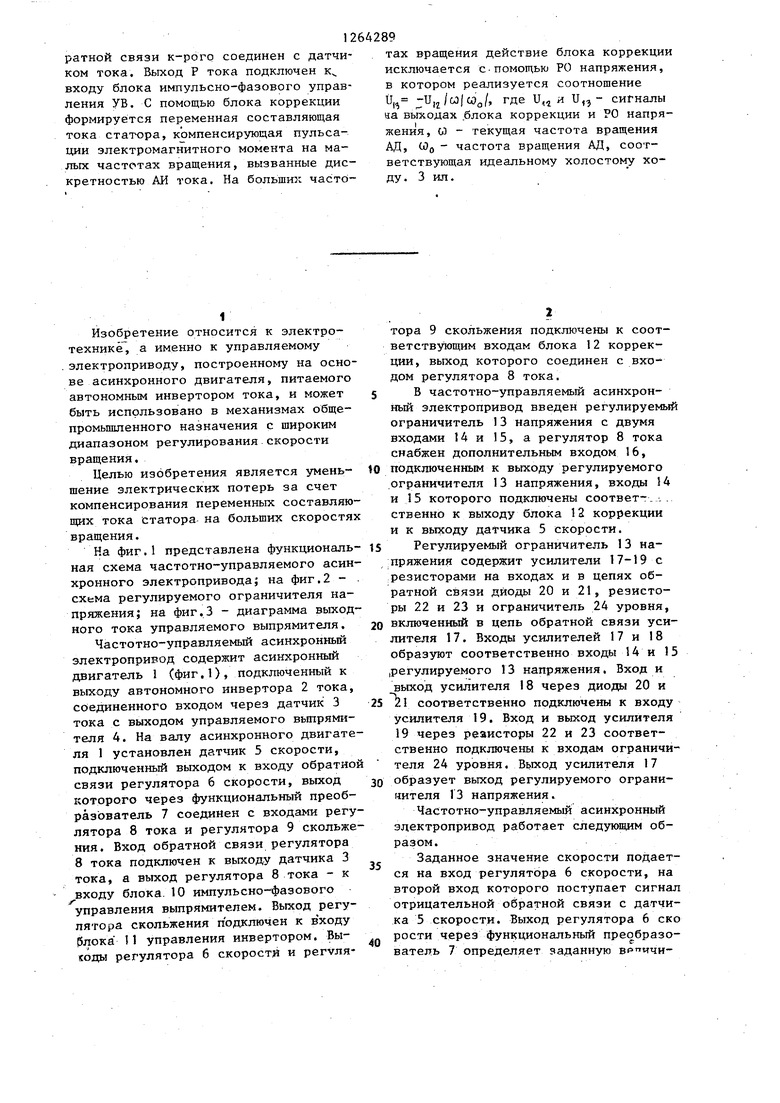
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотноуправляемый асинхронный электропривод | 1983 |
|
SU1129711A2 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1037406A1 |
| Частотно-регулируемый асинхронный электропривод | 1983 |
|
SU1119155A1 |
| Частотно-регулируемый асинхронный электропривод для испытательного стенда двигателей | 1984 |
|
SU1203682A1 |
| Частотнорегулируемый электропривод автономного транспортного средства | 1985 |
|
SU1291458A1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| Частотно-регулируемый асинхронный электропривод | 1982 |
|
SU1099373A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU866679A1 |
Изобретение относится к электротехнике и может быть использовано в механизмах общепромьшшенного назначения. Изобретение является усовершенствованием изобретения по авт. св. №.642839. Целью изобретения является уменьшение электрических потерь. Частотно-управляемый асинхронный электропривод содержит асинхронный двигатель (АД), подключенный через автономный инвертор (АИ) тока, дагчик тока и управляемый выпрямитель (УВ) к сети. На валу А,Д установлен датчик частоты вращения, подключенный к входу обратной связи регулятора (Р) скорости и к первому входу регулируемого ограничителя (РО) напряжения. Выход Р скорости подключен к первому входу блока коррекции и к входу функционального преобразователя. Выход функционального преобразователя соединен с входом Р скольжения и одним входом Р тока. Другой вход Р тока с -связан с вторым входом РО напряжения и с выходом блока коррекции, второй (Л вход к-рого соединен с выходом Р скольжения и входом блока управления АИ тока. Выход РО напряжения подключен к третьему входу Р тока, вход об- s to о: 4 ю 00 г
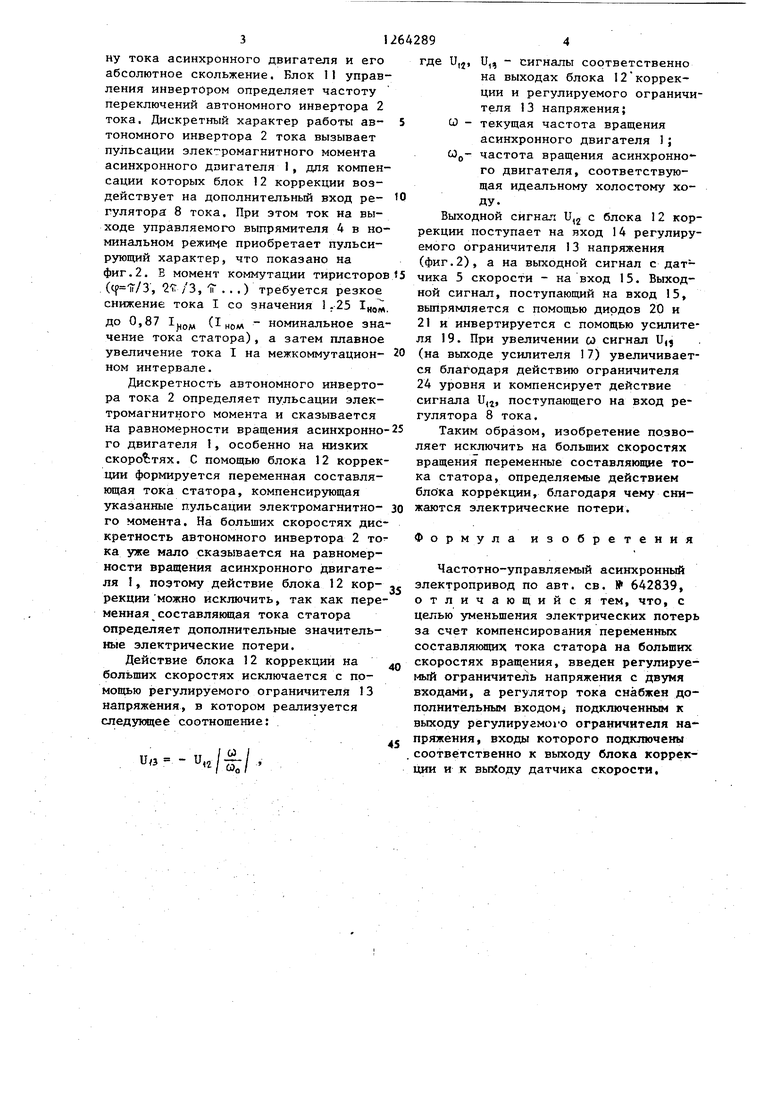
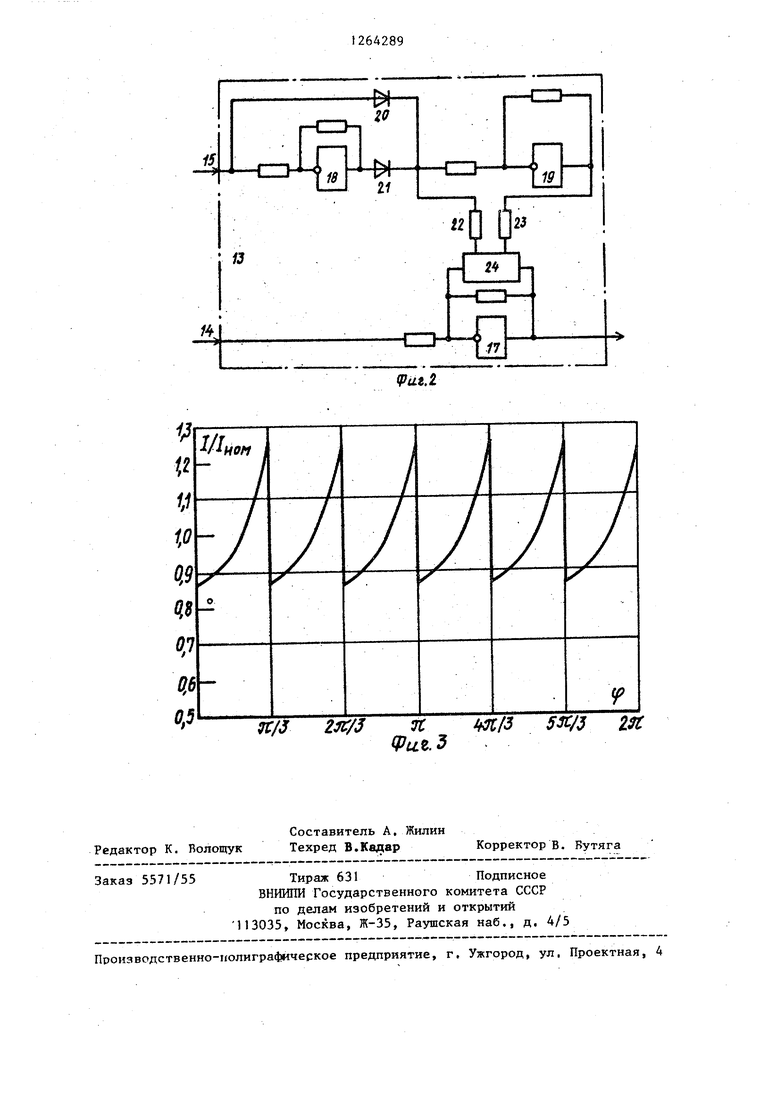
Изобретение относится к электротехнике, а именно к управляемому .электроприводу, построенному на осно ве асинхронного двигателя, питаемого автономным инвертором тока, и может быть использовано в механизмах общепромьшшенного назначения с широким диапазоном регулирования скорости вращения. Целью изобретения является уменьшение электрических потерь за счет компенсирования переменных составляю щих тока статора на больших скоростя вращения. На фиг.1 представлена функциональ ная схема частотно-управляемого асин хронного электропривода; на фиг.2 схема регулируемого ограничителя напряжения; на фиг,3 - диаграмма выход ного тока управляемого выпрямителя, Частотно-управляемый асинхронный электропривод содержит асинхронный двигатель 1 (фиг,1), подключенный к выходу автономного инвертора 2 тока, соединенного входом через датчик 3 тока с выходом управляемого вьтрямителя 4, На валу асинхронного двигате ля 1 установлен датчик 5 скорости, подключенный выходом к входу обратно связи регулятора 6 скорости, выход которого через функциональный преобразователь 7 соединен с входа1ми регу лятора 8 тока и регулятора 9 скольже ния. Вход обратной связи регулятора 8 тока подключен к выходу датчика 3 тока, а выход регулятора 8 тока - к входу блока. 10 импульсно-фазового управления выпрямителем. Выход регулятора скольжения подключен к входу рлока 11 управления инвертором. Вы«оды регулятора б скорости и регулятора 9 скольжения подключены к соответствующим входам блока 12 коррекции, выход которого соединен с входом регулятора В тока. В частотно-управляемый асинхронный электропривод введен регулируемый ограничитель 13 напряжения с двумя входами 14 и 15, а регулятор 8 тока снабжен дополнительным входом 16, подключенным к выходу регулируемого .ограничителя 13 напряжения, входы 4 и 15 которого подключены соответ-. . ственно к выходу блока 12 коррекции и к выходу датчика 5 скорости. Регулируемый ограничитель 13 напряжения содержит усилители 17-19 с резисторами на входах и в цепях обратной связи диоды 20 и 21, резисторы 22 и 23 и ограничитель 24 уровня, включенный в цепь обратной связи усилителя I7, Входы усилителей 17 и 18 образуют соответственно входы 14 и 15 (Регулируемого 13 напряжения, Вход и выход усилителя 18 через диоды 20 и 21 соответственно подключены к входу усилителя 19. Вход и выход усилителя 19 через резисторы 22 и 23 соответственно подключены к входам ограничителя 24 уровня. Вьпсод усилителя 17 образует выход регулируемого ограничителя 13 напряжения, Частотно-управляемый асинхронный электропривод работает следующим образом. Заданное значение скорости подается на вход регулятора 6 скорости, на второй вход которого поступает сигнал отрицательной обратной связи с датчика 5 скорости. Выход регулятора 6 ско рости через функциональный преобразователь 7 определяет заданную вр ичину тока асинхронного двигателя и его абсолютное скольжение. Блок I1 управления инвертором определяет частоту переключений автономного инвертора 2 тока. Дискретный характер работы автономного инвертора 2 тока вызывает пульсации электромагнитного момента асинхронного двигателя 1, для компенсации которых блок 12 коррекции воздействует на дополнительный вход регулятора 8 тока. При этом ток на выходе управляемого выпрямителя 4 в номинальном приобретает пульсирующий характер, что показано на фиг,2. В момент коммутации тиристоров (ср |Г/3, 2ir /3, IT , . .) требуется резкое снижение тока I со значения 1.25 IHOM до 0,87 (I HOW номинальное зна чение тока статора), а затем плавное увеличение тока I на межкоммутационном интервале. Дискретность автономного инвертора тока 2 определяет пульсации электромагнитного момента и сказывается на равномерности вращения асинхронно го двигателя 1, особенно на низких скоростях, С помощью блока 12 коррек ции формируется переменная составляющая тока статора, компенсирующая указанные пульсации электромагнитного момента. На больших скоростях дис кретность автономного инвертора 2 то ка уже мало сказывается на равномерности вращения асинхронного двигателя 1, поэтому действие блока 12 коррекцииможно исключить, так как пере менная составляющая тока статора определяет дополнительные значительные электрические потери. Действие блока 12 коррекции на больщих скоростях исключается с помощью регулируемого ограничителя 13 напряжения, в котором реализуется следуклцее соотношение: 1 89 сигналы соответственно на выходах блока 12коррекции и регулируемого ограничителя 13 напряжения; текущая частота вращения асинхронного двигателя 1j частота вращения асинхронного двигателя, соответствующая идеальному холостому ходу. Выходной сигнал U,2 с блока 12 коррекции поступает на вход 14 регулируемого ограничителя 13 напряжения (фиг.2), а на выходной сигнал с датчика 5 скорости - на вход 15. Выходной сигнал, поступающий на вход 15, выпрямляется с помощью диодов 20 и 21 и инвертируется с помощью усилителя 19. При увеличении Q сигнал U, (на выходе усилителя 17) увеличивается благодаря действию ограничителя 24 уровня и компенсирует действие сигнала U,, поступающего на вход регулятора 8 тока, Таким образом, изобретение позволяет исключить на больших скоростях вращения переменные составляющие тока статора, определяемые действием блока коррекции, благодаря чему снижаются электрические потери. Формула изобретения Частотно-управляемый асинхронный электропривод по авт. св. № 642839, отличающийся тем, что, с целью уменьщения электрических потерь за счет компенсирования переменных составлякицих тока статора на больших скоростях вращения, введен регулируемый ограничитель напряжения с двумя входами, а регулятор тока снабжен дополнительным входом, подключенным к выходу регулируемого ограничителя напряжения, входы которого подключены соответственно к выходу блока коррекции и к вьп(оду датчика скорости.
д
i/ii
40
г ,1
1,0 0,3 ус/з тс ш/3 5х/ (PuZ. 3 Z3t
| Частотноуправляемый асинхронный электропривод | 1976 |
|
SU642839A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
