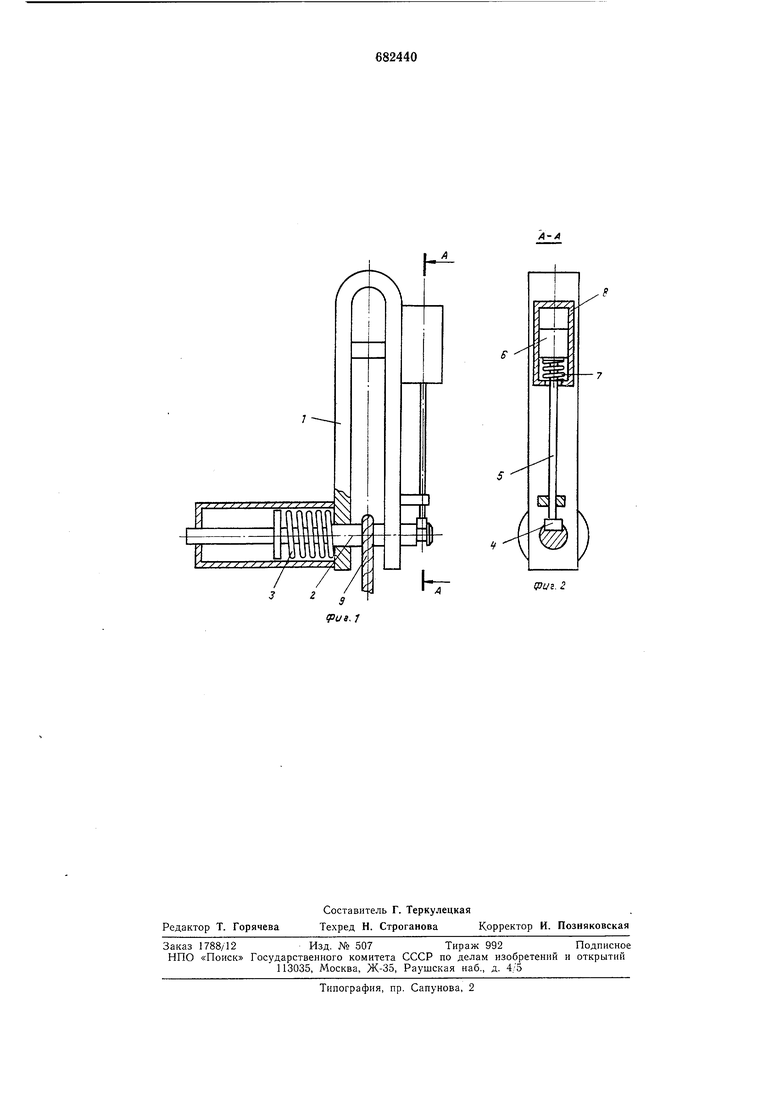
грузонесущий палец 2 в отверстие корпуса 1 и фиксируют планкой 4. Чтобы снять строп 9 с пальца 1 необходимо отклонить корпус 1 в любую сторону от вертикали на угол от 70 до 90°. При наклоне корпуса 1 направление гравитационной силы от противовеса 6 перестает совпадать с осью пружины 7. При наклоне на 60° на пружину, а соответственно на фиксатор, действует половина гравитационной силы противовеса. С увеличением угла наклона уменьшается составляюп,ая гравитационной силы противовеса, пружина разжимается, выталкивая фиксатор из паза пальца 2. Палец 2 под действием пружины 3 выходит из отверстия корпуса 1 и канат освобождается.
Замок позволяет повысить безопасность монтажных работ при подъеме и установке
груза на высокие отметки, так как расстроповка осуществляется без участия стропольщика, т. е. автоматически.
Формула изобретения
Замок для стропа, содержащий П-образный корпус с установленным в его нижней части грузонесущим пальцем, имеющим на одном конце паз и фиксатор, выполненный
в виде подвижного вдоль корпуса стержня, взаимодействующего с пазом грузонесущего пальца, отличающийся тем, что, с целью автоматизации освобождения груза при любом положении замка, в верхней части корпуса жестко закреплен полый стакан, в котором подвижно установлен подпружиненный противовес, связанный со стержнем.
Kd
E
Фиг. 2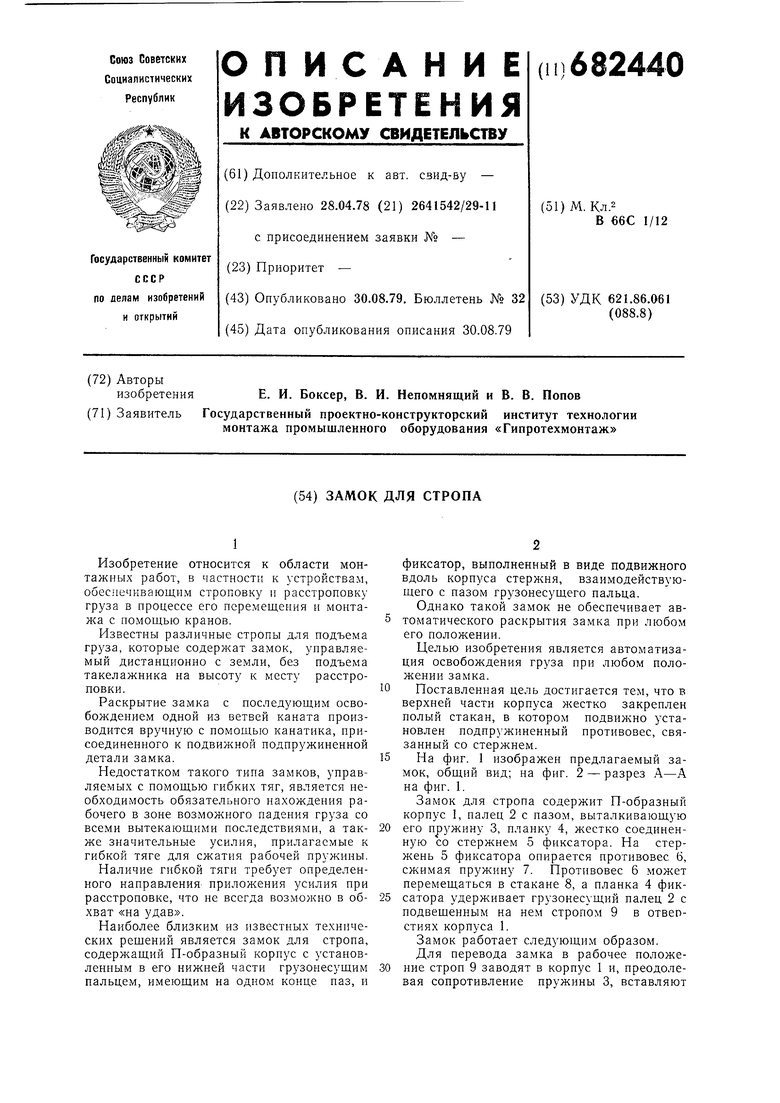
| название | год | авторы | номер документа |
|---|---|---|---|
| Замок для стропа | 1984 |
|
SU1221163A1 |
| ТЯГА С ЗАПОРНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2235671C1 |
| Контейнер для сыпучих материалов | 1988 |
|
SU1604686A1 |
| Коник транспортного средства | 1974 |
|
SU587024A1 |
| Строповочный замок | 1980 |
|
SU933603A1 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| ЦЕПНОЙ ПОДВЕС | 2012 |
|
RU2511761C1 |
| Устройство для кантования и загрузки многоместного транспортно-пускового контейнера в вертикальную пусковую установку | 2022 |
|
RU2788549C1 |
| ПРИВОД СКВАЖИННОГО НАСОСА | 2007 |
|
RU2353807C2 |
| Замок стропа | 1986 |
|
SU1446083A1 |