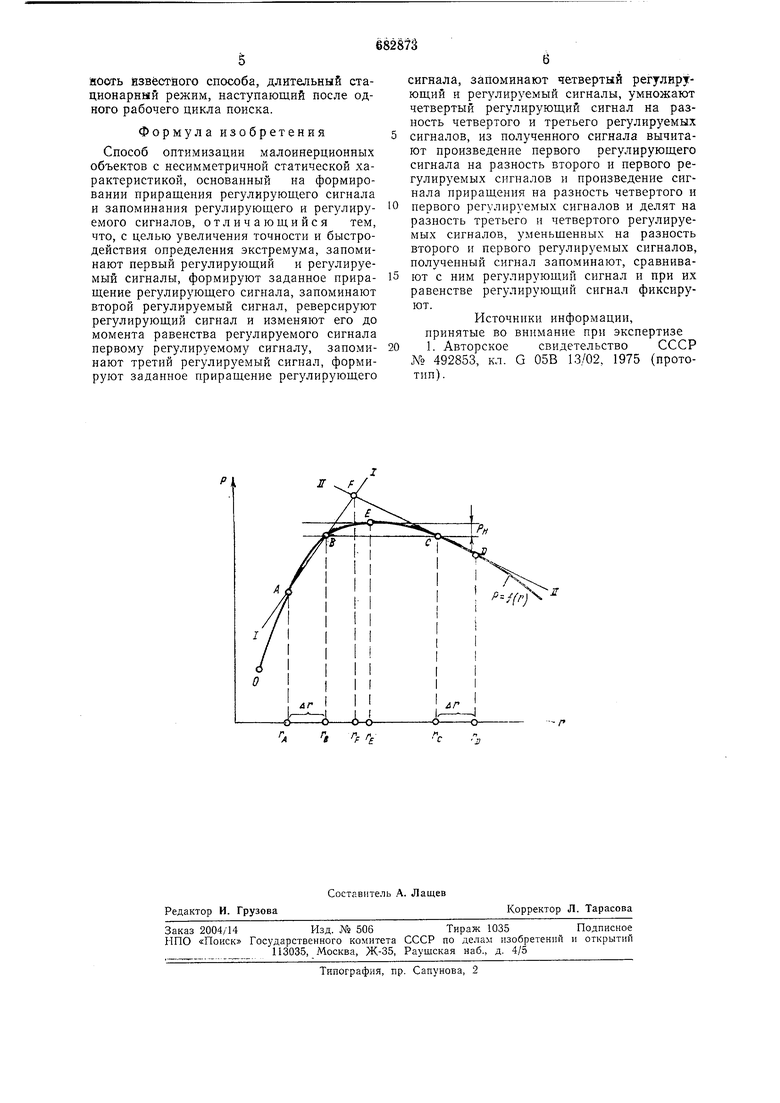
Известный способ при использовании для управления малоинерционными объектами с несимметричной экстремальной статической характеристикой не позволяет получить высокую скорость и точность определения экстремума. Целью предлагаемого способа автоматической оптимизации является повышение точности и быстродействия определения экстремума в малоинерционных объектах, статическая характеристика которых несимметрична относительно точки экстремума. Сущность предлагаемого способа состоит в том, что запоминают первый регулирующий и регулируемый сигналы, формируют заданное приращение регулирующего сигнала, запоминают второй регулируемый сигнал, реверсируют регулирующий сигнал и изменяют его до момента равенства регулируемого сигнала первому регулируемому сигналу. Запоминают третий регулируемый сигнал, формируют заданное приращение регулирующего сигнала, запоминают четвертый регулирующий и регулируемый сигналы, умножают четвертый регулирующий сигнал на разность четвертого и третьего регулируемых сигналов. Из полученного сигнала вычитают произведение первого регулирующего сигнала на разность второго и первого регулируемых сигналов и произведение сигнала приращения на разность четвертого и первого регулируемых сигналов и делят на разность третьего и четвертого регулируемых сигналов, уменьщенных на разность второго и первого регулируемых сигналов. Полученный сигнал запоминают, сравнивают с ним регулирующий сигнал и при их равенстве регулирующий сигнал фиксируют. Способ автоматической оптимизации рассмотрим на примере управления потребляемой мощностью по нагрузке какого-либо приемника, питаемого от линии электропередачи. Способ иллюстрируется чертежем. На нем приняты следующие обозначения: г - аналоговый сигнал входного воздействия - сопротивление нагрузки; Р - аналоговый сигнал выходного воздействия - потребляемая нагрузкой мощность; Р(г) -экстремальная статическая характеристика (ЭСХ); РН - зона нечувствительности; I-I, II-П - секущие, аппроксимирующие ЭСХ в зоне экстремума; точка Е - точка экстремума; точка F - точка пересечения секущих; точки В, С - точки реверса исполнительного механизма входного воздействия; точки А, D - точки удаленные на фиксированное расстояние от точек S и С соответственно;точка О - точка, соответствующая исодному состоянию исполнительного мехаизма (начальному значению входного воздействия) ; А, гв, гс. Го, ТЕ, Гр - значения аналогот ых сигналов входного воздействия, соотетствующие точкам А, В, С, D, Е, F. Пример выполнения способа (перечень пераций). Изменяют сигнал входного возействия (полагаем, что движение по эксремальной статической характеристике началось из точки О вправо). Одновремено измеряют и запоминают сигналы входного Гс и выходного PC воздействия в точке статической характеристики управляемоГО объекта (сигнал РЕ меньще экстремального Р на величину зоны нечувствительности РН). Измеряют и запоминают сигнал выходного воздействия РП в точке D статической характеристики (после точки С движение вправо по характеристике продолжается до точки D, сигнал Гд больще сигнала Гс на величину Д/). Реверсируют направление изменения входного воздействия в точке D (движение по ЭСХ от точки D началось влево), измеряют и запоминают сигнал выходного воздействия PS в точке В характеристики (сигнал РВ меньше сигнала РЕ на величину РН). Одновременно измеряют и запоминают сигналы входного ГА и выходного РЛ воздействий в точке А статической характеристики (после точки В движение влево по характеристике продолжается до точки А, сигнал ГА меньше сигнала Гв на величину Дг). Реверсируют направление изменения входного воздействия в точки А (движение по ЭСХ от точки Л началось вправо). Определяют значение сигнала входного воздействия (точка представляет собой точку пересечения двух секущих I-I и II-II, проведенных через точки А, В -л С, D соответственно, секущие I-I и II-II аппроксимируют статическую характеристику в зоне экстремума) по формуле , Л(Д-РЛ)(Д--РС)-(Д-PC) (PB-PA)-(PD-PC) запоминают сигнал гр, сравнивают текущее значение сигнала входного воздействия г с сигналом Гр. Фиксируют входное воздействие при равенстве сигналов г и гр. В связи с возможным дрейфом ЭСХ и действием возмущений всю приведенную последовательность операций по мере необходимости повторяют. Эффективность способа особенно заметна при ярко выраженной несимметрии ЭСХ. К технико-экономическим преимуществам способа следует отнести скорость поиска экстремума, превосходящую в 1,5-2 раза скорость известного способа, точность поиска, превосходящую в 2-3 раза тонйость известного способа, длительный стационарный режим, наступающий после одного рабочего цикла поиска.
Формула изобретения
Способ оптимизации малоинерционных объектов с несимметричной статической характеристикой, основанный на формировании приращения регулирующего сигнала и запоминания регулирующего и регулируемого сигналов, отличающийся тем, что, с целью увеличения точности и быстродействия определения экстремума, запоминают первый регулирующий и регулируемый сигналы, формируют заданное приращение регулирующего сигнала, запоминают второй регулируемый сигнал, реверсируют регулирующий сигнал и изменяют его до момента равенства регулируемого сигнала первому регулируемому сигналу, запоминают третий регулируемый сигнал, формируют заданное приращение регулирующего
сигнала, запоминают четвертый регулирующий и регулируемый сигналы, умножают четвертый регулирующий сигнал на разность четвертого и третьего регулируемых сигналов, из полученного сигнала вычитают произведение первого регулирующего сигнала на разность второго и первого регулируемых сигналов и произведение сигнала приращения на разность четвертого и первого регулируемых сигналов и делят на разность третьего и четвертого регулируемых сигналов, уменьшенных на разность второго и первого регулируемых сигналов, полученный сигнал запоминают, сравнивают с ним регулирующий сигнал и при их равенстве регулирующий сигнал фиксируют.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 492853, кл. G 05В 13/02, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматической оптимизации инерционных управляемых объектов | 1973 |
|
SU492853A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОПТИМИЗАЦИИ МНОГОКАНАЛЬНОГО МАЛОИНЕРЦИОННОГО ОБЪЕКТАУПРАВЛЕНИЯ | 1972 |
|
SU351198A1 |
| СИСТЕМА ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ | 1972 |
|
SU341012A1 |
| Многоканальная экстремальная система управления инерционными объектами | 1974 |
|
SU528545A1 |
| Устройство для экстремального регулирования | 1979 |
|
SU860000A1 |
| Система экстремального регулирования | 1980 |
|
SU885972A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Устройство для автоматической настройки компенсации | 1987 |
|
SU1520626A1 |
| Экстремальный регулятор режима обработки на металлорежущих станках | 1980 |
|
SU1015338A1 |
| МНОГОКАНАЛЬНЫЙ НЕПРЕРЫВНОШАГОВЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1973 |
|
SU374578A1 |
А
I
U
/ /
Л
