Изобретение относится к системам автоматической оптимизации и может быть использовано при разработке различных систем автоматической оптимизации многоканальных малои«ерционных объектов с одной выходной величиной, экстремально зависящей от .каждого из входных воздействий.
В известных способах автоматической оптимизации многока«ального малоинерцио1нного объекта управления имеют место необходимость искусственного увеличения и последующего уменьшения скорости изменения всех управляющих -координат, многократность процесса Поиска по всем каналам, невысокая точность при наличии не явно выраженного экстремума.
По предлагаемому способу сокращение времени поиска экстремума и повышение точности выхода в точки частных и глобального экстремумов (середины площадок) в многокайальном малоинерционном объекте, обладающем симметричной стабильной статической экстремальной характеристикой, имеющей в зоне экстремума площадку, ширииа которой может быть различна для различных каналов, достигается тем, что входной сигнал каждого канала моделируют линейно зависящим от времени сигналом, замеряют изменение моделирующего сигнала за период поиска между двумя реверсами входного сигнала в зоне
экстремума, сравнивают половину измеренного значения моделирующего сигнала с текущим значением этого сигнала в течение следующего периода поиска и при их равенстве
фиксируют входной сигнал.
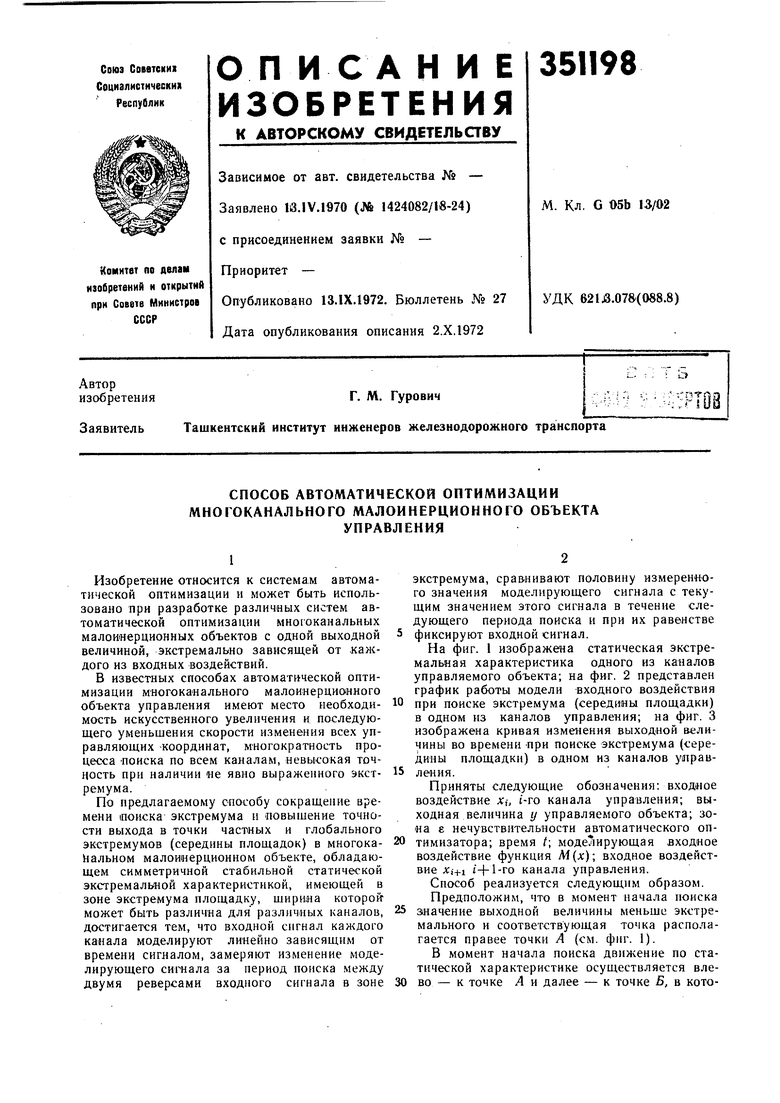
На фиг. 1 изображена статическая экстремальная характеристика одного из каналов управляемого объекта; на фиг. 2 представлен график работы модели входного воздействия
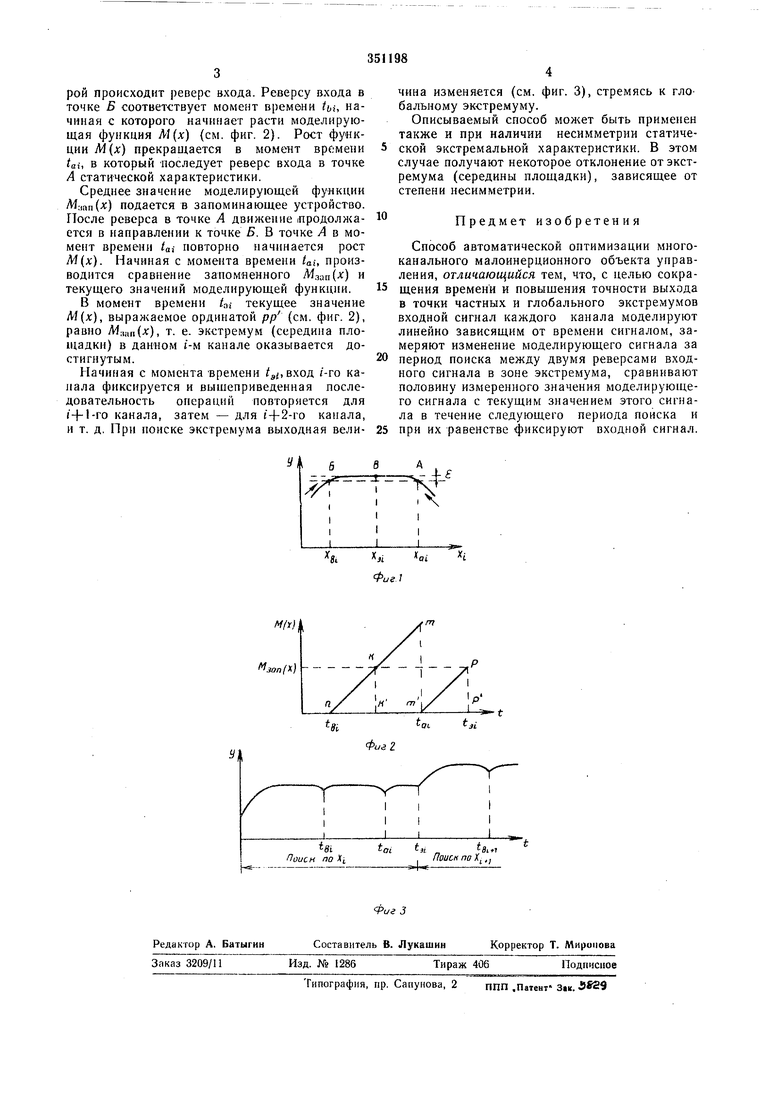
при поиске экстремума (середины площадки) в одном из каналов управления; на фиг. 3 изображена кривая изменения выходной величины во времени -при поиске экстремума (середины площадки) в одном из каналов улравления.
Приняты следующие обозначения: входное воздействие Хг, i-ro канала управления; выходная величина у управляемого объекта; зона е нечувствительности автоматического оптимизатора; время t; моделирующая входное воздействие функция М(л ); входное воздействие Xi+i i-f 1-го канала управления. Способ реализуется следующим образом. Предположим, что в момент начала поиска
значение выходной величины меньще экстремального и соответствующая точка располагается правее точки А (см. фиг. 1).
рой происходит реверс входа. Реверсу входа в точке Б соответствует момент времени tbi, начиная с которого начинает расти моделирующая функция А1{х) {см. фиг. 2). Рост функции М(х) прекращается в MOMeiiT времени tai, В который последует реверс входа в точке А статической характеристики.
Среднее значение моделирующей функции М:,ап(х) подается в запоминающее устройство. После реверса в точке А движение (Продолжается в направлении к точке Б. В точке А в момев1т времени tai повторно начинается рост М(х). Начиная с момента времени tat, производится сравнение запомненного Мяйп(х) и текущего значений моделирующей функции.
В момент времени tai текущее значение М{х), выражаемое ординатой рр (см. фиг. 2), равно М;шп(х), т. е. экстремум (середина площадки) в данном 1-м канале оказывается достигнутым.
Начиная с момента времени /д.вход /-го канала фиксируется и вышеприведенная последовательность операций повторяется для I+l-ro канала, затем - для i-f2-ro канала, и т. д. При поиске экстремума выходная величина изменяется (см. фиг. 3), стремясь к глО бальному экстремуму.
Описываемый способ может быть применен также и при наличии несимметрии статической экстремальной хара|Ктеристики. В этом случае получают некоторое отклонение от экстремума (середины площадки), зависящее от степени несимметрии.
Предмет изобретения
Способ автоматической оптимизации многоканального малоинерционного объекта управления, отличающийся тем, что, с целью сокращения времени и повышения точности выхода в точки частных и глобального экстремумов входной сигнал каждого канала моделируют линейно зависящим от времени сигналом, замеряют изменение моделирующего сигнала за период поиска между двумя реверсами входного сигнала в зоне экстремума, сравнивают половину измеренного значения моделирующего сигнала с текущим значением этого сигнала в течение следующего периода поиска и 5 при их равенстве фиксируют входной сигнал.