Численное решение многих задач теоретической механики, гидродинамики, теории упругости, строительной механики и других областей прикладной математики сводится к рещению линейных алгебраических уравнений со многими неизвестными. Существующие методы численного решения системы таких уравнений вида:
S Л,Л+Б,-0;(к 1,2,3...л)(1)
весьма громоздки и в некоторых случаях не дают требуемой точности. Кроме того, существующие методы требуют большого внимания и нанряжения при решении, так как незначительная описка приводит к неверному результату.
Поэтому неоднократно предлагались приборы для численного решения системы линейных алгебраических уравнений, в том числе и такие, в которых применены две переставные относительно друг друга системы коромысел, уравновешенных на шарнирных опорах, причем каждое из них снабжено переставным грузом.
Настоящее изобретение касается конструктивного выполнения прибора для численного решения системы линейных алгебраических уравнений и заключается в том, что каждое коромысло одной системы коромысел выполнено в виде рамы, несущей продольную направляющую и ряд натянутых вдоль рамы струн, пропущенных через вилки коромысел второй системы. Коромысла второй системы установлены на переставных тележках, передвигаемых для решения уравнений так, чтобы рамы первой системы коромысел пришли в равновесие. Для автоматического приведения каждой рамы первой системы коромысел в положение равновесия путем перемещения тележек второй системы коромысел рамы снабжены контактами, замыкающими через предельные контакты при отклонении от положения равновесия электрическую цепь автомата, перемещающего тележки, до приведения системы в положение равновесия.
Автомат, управляющий перемещением тележек, выполнен в виде системы уравновешенных на опоре горизонтальных рам с натянутыми струнами, взаимодействующими с грузами, устанавливаемыми соответственно коэфициентам системы уравнений посредством ходовых винтов.
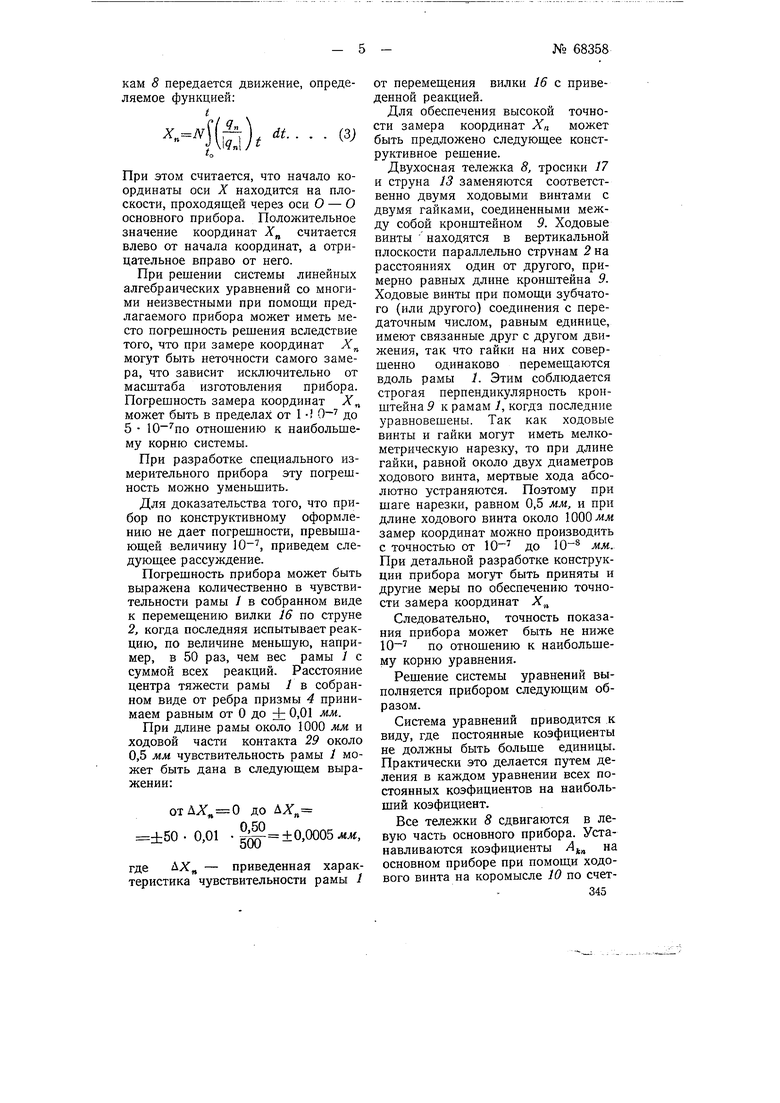
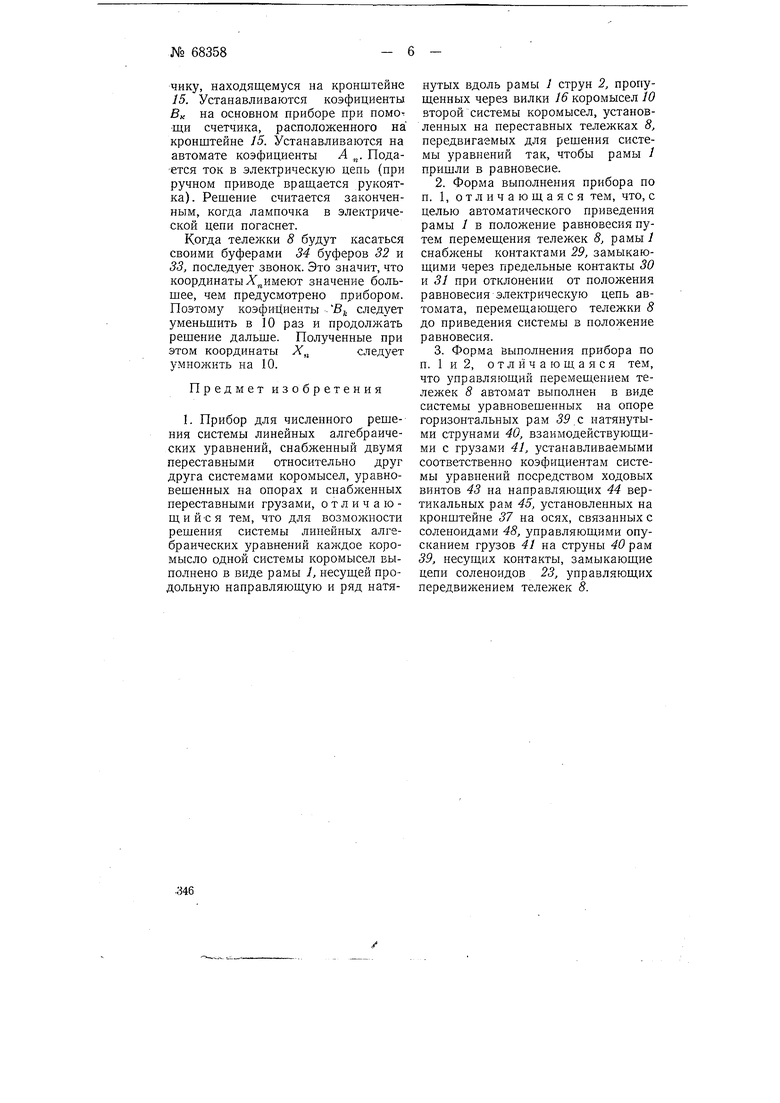
На фиг. 1 показан продольный разрез предлагаемого прибора; на фиг. 2 - вид прибора в разрезе по линии АА на фиг. 1; на фиг. 3 - то же в разрезе по линии ВВ на фиг. 1;
341 .
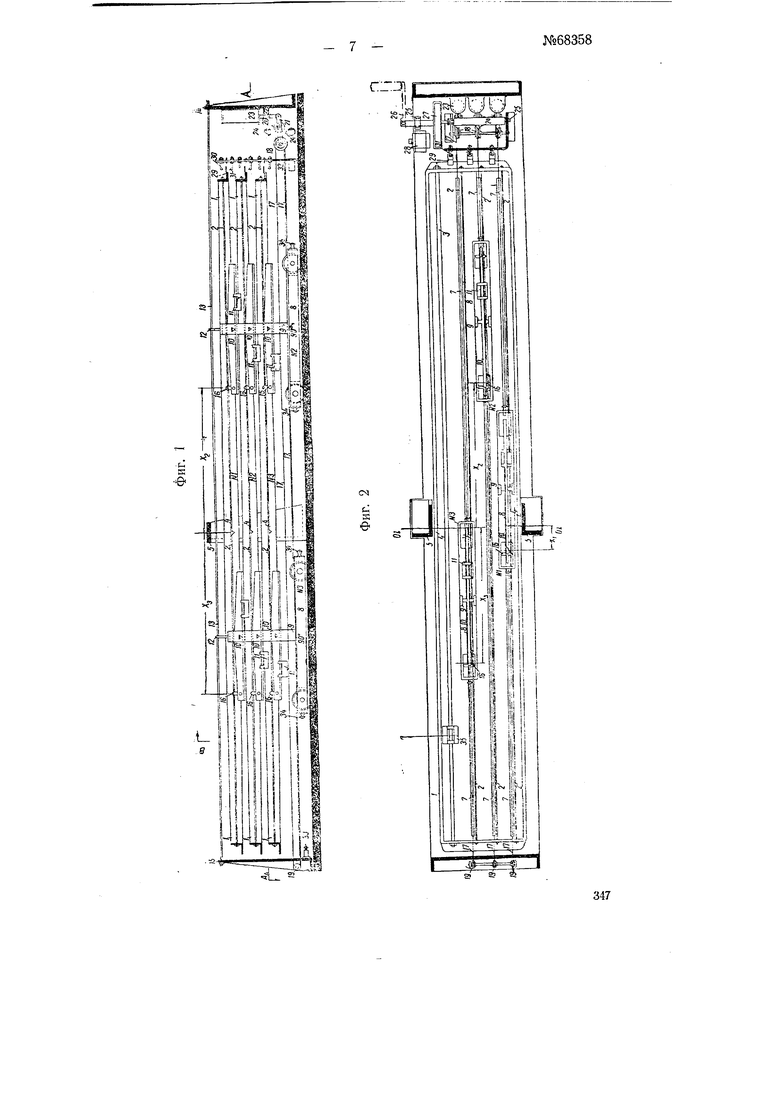
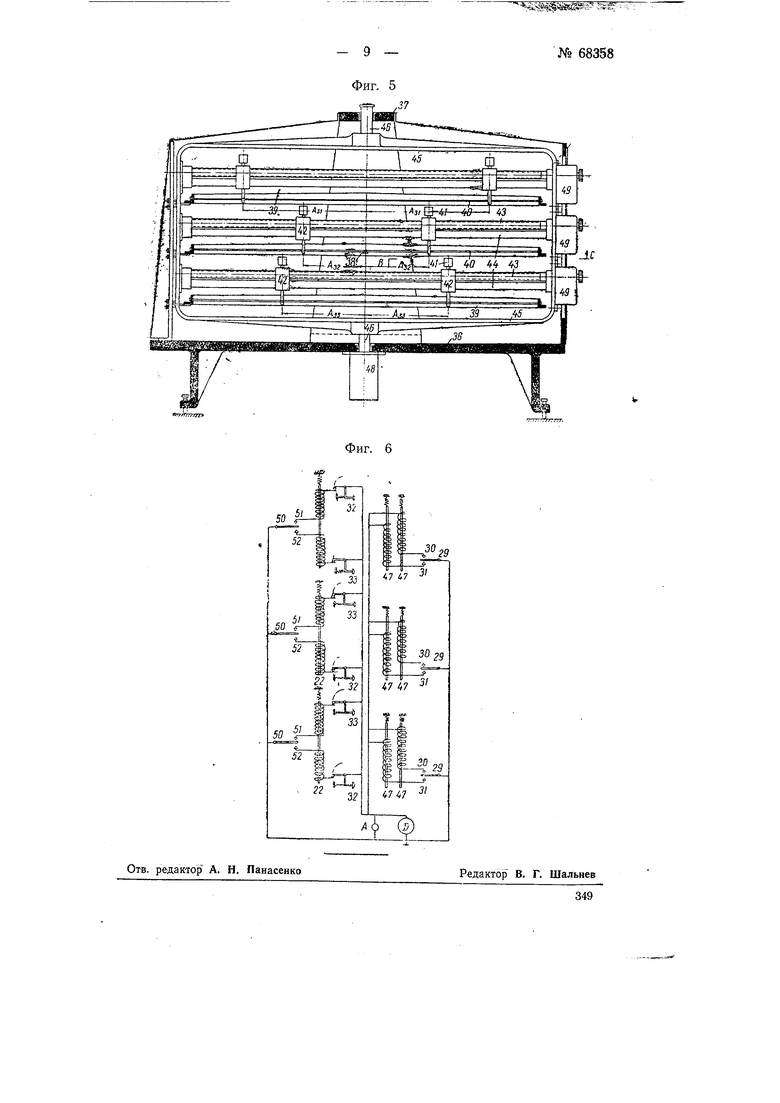
на фиг. 4 - продольный разрез автомата; на фиг. 5 - вид автомата в разрезе по линии К.Н на фиг. 4; на фиг. 6 - электрическая схема автомата.
Прибор состоит из двух частей: основной, которая производит непосредственное решение, и автомата, служащего для автоматического управления решением на основном приборе. Обе части выполнены в форме ящиков закрытого типа, связанных между собой электрическим кабелем.
Предлагаемый прибор для решения системы линейных алгебраических уравнений со многими неизвестными может быть построен для решения системы уравнений с двадцатью и менее неизвестными. Систему уравнений с большим числом неизвестных можно всегда свести к системе с двадцатью неизвестными.
Для облегчения рассмотрения принципа устройства прибора и для упрощения доказательств, положенных в основу этого принципа, здесь описаны принципиальные конструктивная, кинематическая и электрическая схемы применительно к прибору для непосредственного решения системы уравнений с тремя неизвестными, так как прибор для решения системы уравнений с двадцатью неизвестными будет иметь ту же схему, с той только разницей, что в нем будет большее количество соответствующих деталейДействие прибора основано на принципе нрименения закона статических моментов силы тяжести, т. е. предусматривает наличие системы элементарных рычажных весов, регулируемых специальной электрической схемой.
Прибор состоит из трех рам /. Каждая из них имеет по три натянутых вдоль рамы струны 2 и одну направляющую 3, расположенную вдоль рамы.
Рамы на призмах 4 подвешены одна над другой к кронштейнам 5, прочно соединенным с плитой 6, служащей фундаментом всего прибора.
Плита 6 имеет три канавки 7, по которым катятся двухосные тележки S. Расположение струн 2 соответст342
вующих рам /и соответствующей канавки 7 определяет вертикальную плоскость, .проходящую через них.
На каждой тележке 8 строго вертикально, считая плоскость плиты горизонтальной, поставлен кронштейн Я на котором на призмах подвешены три коромысла 10. На коромыслах имеются направляющие, по которым скользят движки 11, представляющие собой гири весом, равным единице, а также вилки 16, через которые проходят соответствующие струны 2. Для удержания кронштейна 9 в вертикальном положении в его верхней части имеется кольцо
12,через которое проходит струна
13,натянутая на кронштейны 14 к 15 параллельно канавкам 7. Кронштейны 14 и 15 прочно соединены с плитой 6.
Перемещение тележки 8 по канавке 7 осуществляется от ручного привода 26 при помощи передач 25 и 27, тросиков 17, проходящих в сильно натянутом состоянии через блоки 18 и 19, роликов 20 с тросиками и валиков 24.
Ручной привод может быть заменен приводом электрическим, питаемым от осветительной сети.
Ролики 20 насажены на шатуны 21, соединенные с сердечниками 22 соленоидов 23. Последние прочно соединены с кронштейном 14. С помощью соленоидов, при постоянном вращении валиков 24 в разные стороны, достигается знакопеременность в движении тележек 8.
После того как рамы 1 будут установлены на призмы 4, грани которых нроходят через вертикальную плоскость, и на плите 6 будут смонтированы тележки 5 с коромыслами 10, положение рам 1 должно быть строго горизонтально при условии, что вилки 16, проходящие через струны 2, находятся в одной вертикальной плоскости с ребрами призм 4. В этом случае рамы / после монтажа считаются совершенно уравновешенными. Такое же условие ставится и при монтаже коромысел 10 на призмах в кронштейне 9, где при помещении центра тяжести движка НЕ плоскости, проходящей через ребра призм, коромысло 10
должно быть строго горизонтально (или перпендикулярно оси кронштейна 9).
С правого конца каждой рамы 1 выходит контакт 29, находящийся между контактами 30 и 31 электрической цепи, закрепленными на щите, который жестко соединен с плитой 6. В правой части прибора, в нижней части щита, расположены буфера 32. На кронщтейне 15 расположен такой же буфер 33. Назначение этих буферов - останавливать движение тележек 8, когда последние касаются их своими буферами 34, выключая при этом тек в соответствующем соленоиде 23. По направляющей 3 каждой рамы скользит ползун 35, представляющий собой гирю весом, равным единице.
Все вилки 16 на коромыслах Ю находятся на одинаковом расстоянии от точки подвеса коромысла соответствующего кронщтейна 9 тележки 8. Это расстояние принимается равным единице. Если при этом движок // поместить на расстоянии 7„ от точки подвеса коромысла, то он своим весом вызовет реакцию соответствующей струны 2 на вилку 16, величина которой определяется по формуле: единииа единице /4.„, т. е.
,пгде индекс к определяет номер рамы 1, а индекс п - номер струны. Представим себе, что на все струны действуют реакции Л,.„. Составим в этом случае сумму моментов сил реакций , действующих на раму 1, относительно оси О,.О считая раму, при , даавновещенной относительно оси Of).;.
М.Е А,„Х,+В.
Аналогично можно составить суммы моментов и для двух других рам, т. е.:
я-3
Ж, S А,.,,Х„+В,.
лfз lЛз„;r„-fS,.
в том случае, когда MI TWj , координаты , Xz и з, т. е. расстояния вертикальной линии, соединяющей точки касания знлок 16 соответствующими струнами 2, от плоскости, проходящей через ребра призм 4, должны удовлетворять системе линейных алгебраических уравнений с тремя неизвестными
вида:
А,„Х,,+В,0 .... (2) /1--1
Поэтому принцип прибора основан на установке по струнам 2 рам 1 реакций при помощи коромысел 10 и движков // и подбора таких значений координат Xi, Xz ii з, при которых значения статических моментов сил, действующих на рамы 1, были бы равны нулю, т. е. Af, М, М, 0.
Установка координат Ао и АЗ на основном приборе производится при помощи автомата и электрической схемы.
Принцип устройства автомата основаи на способе рещения системы линейных алгебраических уравнений со многими неизвестными методом последовательного приближения. Математически метод последовательного приближения можно представить в следующем окончательном виде:
Г ( А-„:.-Л/(:-, Л(,2,3. .п), (3)
:nj I п
где: Хп -искомая координата, которая должна после отыскания удовлетворять системе уравнений (1);
t - параметр;
N - постоянный коэфициент, определяющий состояние. Б. данном случае электромеханической системы.
у /И,
-,t, ;Л1,
(при/г 1,2,3..п), . . (4) где А, - постоянные коэфициенты
системы уравнения СОга
ЛГ
(при /с 1, 2, 3 . . -г). . . (2)
Система функций (2), (3) и (4),
следовательно, должна обладать
свойством быстросходящихся функ343
ций, пределом сходимости которых является система уравнений (1).
На основании выщеизложенного принципа автомат может быть оформлен в самых разнообразных конструктивных формах. Окончательно остановиться можно на следующей электротехнической схеме автомата.
Прибор (фиг. 4), выполняющий роль автомата, соогоит из служащей основанием плиты 36, к которой лрочно присоединен кронштейн 37. К последнему подвешиваются на призмах 38 одна над другой горизонтальные рамы tVP. Вдоль каждой рамы 39 протянуты три пары параллельных струн 40. Они расположены на рамах так, что каждая струна одной рамы расположена в вертикальной плоскости, проходящей через соответствующие струны двух других рам. Каждой струны может касаться соответствующий и1тырь 41, вес которого равен единице. Каждый штырь насажен на ходовую гайку 42, свободно передвигающуюся по ходовому винту 43 и направляющему валику 44. Каждые три ходовых винта 43 со своими направляющими валиками 44 присоединяются по вертикали к вертикальной раме 45. Все рамы 45 имеют по две полуоси 46. Одна из них в верхней части помещается в направляющее отверстие на кронштейне 37, а вторая в нижней части в направляющее отверстие в плите 36. Нижняя полуось 46 каждой рамы 45 сблокирована с сердечником соленоида 48.
К одному концу каждого ходового винта при-страивается счетчик 49 чисел оборотов ходового винта со шкалой значений постоянных козфиЦиентов системы уравнений. Горизонтальные рамы 39 на конце имеют по одному контакту 50 (фиг. 6). Каждый контакт 50 находится между двумя контактами 5} и 52 электрической цепи. Горизонтальные рамы 39 в случае, когда штыри 41 не касаются струн 40, должны быть совершенно уравновешены. Вертикальные рамы 45 все время находятся в приподнятом положении, при котором штыри 41 не касаются струн 40. Рамы 45 опускаются, и при этом благодаря дейст314
ВИЮ соленоида штырь 41 касается струны 40. Работа соленоида регулируется электрической цепью, находящейся под током. При описанной выше конструктивной форме автомата и взаимодействии его с основным прибором, согласно предлагаемой принципиальной электрической схеме, функции (2), (3) и (4) определяются следующим путем.
fr Выражение ТлТТ- представляюK iil
щее собой знак перед М, определяется положением контакта 29 по отношению к контакту 30 или 31 соответствующей рамы основного прибора (фиг. 6). (Касание контакта 29 с контактом 31 дает знак- -, а с контактом 30 знак - ). Каждая пара соленоидов 48, относящаяся к вертикальным рамам одного и того же значения -постоянного коэфициента , соединена соответственно с парой контактов одной из рам / основного прибора таким образом, что знак -)- или - передается движению одной из вертикальных рам 45, Каждая горизонтальная рама 39 определяет функцию:
.
согласно принципу, изложенному для основного прибора, но с той лищь разницей, что сила реакции струны 40 на штырь 41 по величине равна единице и находится на расстоянии от оси F-F, равном А. Знакопеременность этого расстояния
f регулируется выражением ,
через пару соленоидов 48.
Выражение ( -- ) представt.
3 П
ляющее собой знак перед величиной д„, определяется положением контакта 50 по отношению к контакту 51 или 52 соответствующей горизонтальной рамы 39 автомата (касание контакта 50 с контактом 51 дает знак + и с контактом 52 знак -). Контакты 51 и 52 соединены с соленоидом 23 таким образом, что через систему кинематической связи от сердечника 22 соленоида 23 тележкам 8 передается движение, определяемое функцией:
При этом считается, что начало координаты оси X находится на плоскости, проходящей через оси О - О основного прибора. Положительное значение координат Х„ считается влево от начала координат, а отрицательное вправо от него.
При решении системы линейных алгебраических уравнений со многими неизвестными при помощи предлагаемого прибора может иметь место погрешность решения вследствие того, что при замере координат Х могут быть неточности самого замера, что зависит исключительно от масштаба изготовления прибора. Погрешность замера координат Х может быть в пределах от 1 О- до 5 отношению к наибольшему корню системы.
При разработке специального измерительного прибора эту погрешность можно уменьшить.
Для доказательства того, что прибор по конструктивному оформлению не дает погрешности, превышающей величину , приведем следующее рассуждение.
Погрешность прибора может быть выражена количественно в чувствительности рамы / в собранном виде к перемещению вилки 16 по струне 2, когда последняя испытывает реакцию, по величине меньщую, например, в 50 раз, чем вес рамы ) с суммой всех реакций. Расстояние центра тяжести рамы 1 в собранном виде от ребра призмы 4 принимаем равным от О до + 0,01 мм.
При длине рамы около 1000 мм и ходовой части контакта 29 около 0,5 мм чувствительность рамы 1 может быть дана в следующем выражении:
отДХ« 0 до
0,50
- ±Q,QQQ5MM,
±50 . 0,01 500
где ДХ„ - приведенная характеристика чувствительности рамы /
от перемещения вилки 16 с приведенной реакцией.
Для обеспечения высокой точности замера координат Хп может быть предложено следующее конструктивное решение.
Двухосная тележка 8, тросики 17 и струна 13 заменяются соответственно двумя ходовыми винтами с двумя гайками, соединенными между собой кронштейном 9. Ходовые винты находятся в вертикальной плоскости параллельно струнам 2 на расстояниях один от другого, примерно равных длине кронштейна 9. Ходовые винты при помощи зубчатого (или другого) соединения с передаточным числом, равным единице, имеют связанные друг с другом движения, так что гайки на них совершенно одинаково перемещаются вдоль рамы /. Этим соблюдается строгая перпендикулярность кронштейна 9 к рамам 1, когда последние уравновешены. Так как ходовые винты и гайки могут иметь мелкометрическую нарезку, то при длине гайки, равной около двух диаметров ходового винта, мертвые хода абсолютно устраняются. Поэтому при шаге нарезки, равном 0,5 мм, и при длине ходового винта около ЮООмм замер координат можно производить с точностью от до мм.При детальной разработке конструкции прибора могут быть приняты и другие меры по обеспечению точности замера координат Х„
Следовательно, точность показания прибора может быть не ниже по отношению к наибольшему корню уравнения.
Решение системы уравнений выполняется прибором следующим образом.
Система уравнений приводится к виду, где постоянные коэфициенты не должны быть больше единицы. Практически это делается путем деления в каждом уравнении всех постоянных коэфициентов на наибольший коэфициент.
Все тележки 8 сдвигаются в левую часть основного прибора. Устанавливаются коэфициенты на основном приборе при помощи ходового винта на коромысле 10 по счет345
чику, находящемуся на кронштейне 15. Устанавливаются коэфициенты Вк на основном приборе нри помощи счетчика, расположенного на кронштейне 15. Устанавливаются на автомате коэфициенты А „. Подается ток в электрическую цепь (при ручном приводе враш;ается рукоятка). Решение считается законченным, когда лампочка в электрической цепи погаснет.
Когда тележки 8 будут касаться своими буферами 34 буферов 32 и 33, последует звонок. Это значит, что координаты А имеют значение большее, чем предусмотрено прибором. Поэтому коэфициенты . Ъ следует уменьшить в 10 раз и продолжать решение дальше. Полученные при этом координаты Х,следует
умногкить на 10.
Предмет изобретения
1. Прибор для численного решения системы линейных алгебраических уравнений, снабженный двумя переставными относительно друг друга системами коромысел, уравновешенных на опорах и снабж;енных переставными грузами, отличаюШийСЯ тем, что для возможности решения системы линейных алгебраических уравнений каждое коромысло одной системы коромысел выполнено в виде рамы 1, несущей продольную направляющую и ряд натянутых вдоль рамы 1 струн 2, пропущенных через вилки 16 коромысел 10 второй системы коромысел, установленных на переставных тележках 8, передвигаемых для решения системы уравнений так, чтобы рамы / пришли в равновесие.
2.Форма выполнения прибора по п. 1, отличающаяся тем, что, с целью автоматического приведения рамы / в положение равновесия путем перемещения тележек 8, рамы / снабжены контактами 29, замыкающими через предельные контакты 30 и 31 при отклонении от положения равновесия электрическую цепь автомата, перемещающего тележки 8 до приведения системы в положение равновесия.
3.Форма выполнения прибора по п. 1и2, отличающаяся тем, что зправляющий перемещением тележек 8 автомат выполнен в виде системы уравновешенных на опоре горизонтальных рам 39 с натянутыми струнами 40, взаимодействующими с грузами 41, устанавливаемыми соответственно коэфициентам системы уравнений посредством ходовых винтов 43 на направляющих 44 вертикальных рам 45, установленных на кронштейне 37 на осях, связанных с соленоидами 48, управляющими опусканием грузов 41 на струны 40 рам 39, несущих контакты, замыкающие цепи соленоидов 23, управляющих передвижением тележек 8.
.Sifb,.
Ri
ГГЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для определения действительных корней степенных алгебраических уравнений | 1936 |
|
SU50375A1 |
| Устройство для определения центра тяжести изделий | 1980 |
|
SU875227A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПРОИЗВОДСТВА ПРИБЛИЖЕННЫХ ВЫЧИСЛЕНИЙ | 1932 |
|
SU36063A1 |
| ПОДВЕСНОЕ ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО | 2007 |
|
RU2373135C2 |
| Толкатель для загрузки печи | 1977 |
|
SU737760A1 |
| Установка для формования и резки глиняного бруса | 1990 |
|
SU1761501A1 |
| ТЕЛЕЖКА-НОСИТЕЛЬ | 2005 |
|
RU2309077C2 |
| УСТАНОВКА ДЛЯ ФОРМОВАНИЯ И РЕЗКИ ГЛИНЯНОГО БРУСА | 1991 |
|
RU2030995C1 |
| СПОСОБ УПРАВЛЕНИЯ СМАЗКОЙ РЕЛЬСОВ В КРИВЫХ УЧАСТКАХ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2492087C2 |
| СПАРЕННАЯ УСТАНОВКА ДЛЯ ЗАПУСКА ЗЕНИТНЫХ РАКЕТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1995 |
|
RU2088877C1 |
; (ij :: (,:: : i.
)( /// f/f/7
Фиг. 4
37
(
/у U
