Изобретение имеет в виду автоматическое устройство для производства приближенных вычислений, работающее при помощи электрического тока.
В противоположность уже предложенным устройствам, действующим при помощи электрического тока и служащим для разрешения отдельных вопросов математики (например, электромеханические весы шведского инженера Розена для решения уравнений высших степеней, интеграф американских инженеров Glover и Plumb для решения дифференциальных уравнений, линейных и нелинейных), предлагаемое устройство при введении ограниченного числа простых вспомогательных приспособлений дает возможность использования его практически для всех отделов математики, как-то: для решения уравнений с одним неизвестным, для решения системы уравнений любого порядка со многими неизвестными, для сложения, вычитания, умножения и деления функций, для возведения функций в любую степень и для извлечения из функций корня любой степени, для дифференцирования и интегрирования функций и для интегрирования дифференциальных уравнений и систем их любого порядка.
В основу предлагаемого устройства положен принцип "следящей системы".
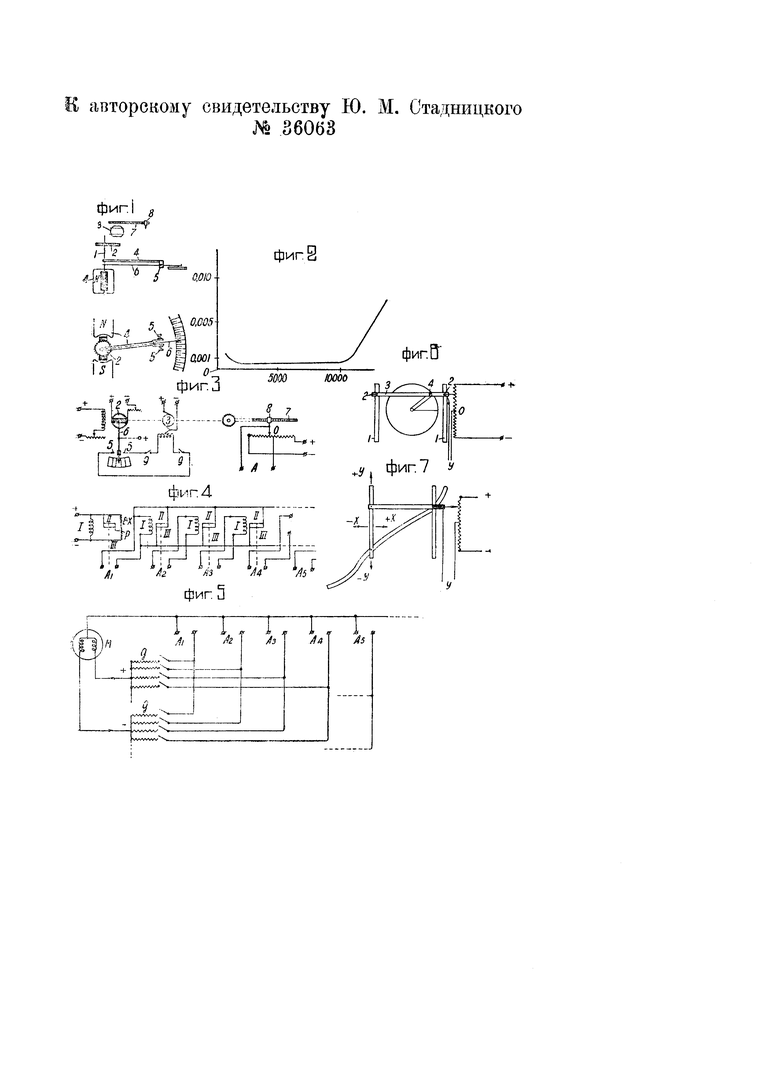
На чертеже фиг. 1, 2 и 3 поясняют принцип устройства "следящей системы"; фиг. 4 и 5 - предлагаемое устройство в схематическом виде; фиг. 6-12 - дополнительные приспособления к устройству в схематическом виде.
Принцип "следящей системы" заключается в следующем. Передаточная ось 1 (фиг. 1), совпадающая по направлению с осью электроизмерительного прибора А и приводимая во вращение через посредство зубчатой передачи 2 от сервомотора 3 (или электромагнитного храпового механизма), жестко связана с рейкой 4, несущей изолированные от нее контакты 5, 5, между которыми может совершать небольшие колебания стрелка 6 электроизмерительного прибора, замыкающая при соприкосновений то с одним, то с другим контактом 5, 5 цепь сервомотора 3, получающего вращение соответственно то в одну, то в другую сторону. Сервомотор 3, помимо привода рейки 4, приводит в движение, через посредство соответствующей зубчатой передачи или любым иным образом, ходовой винт или зубчатую рейку 7, связанную с каким-либо указателем, или пером пишущего прибора, или же движком 8 потенциометра, благодаря чему движок непрерывно следует за всеми отклонениями стрелки 6 измерительного прибора. При равномерной шкале прибора (прибор системы д′Арсонваля) положение движка потенциометра, а следовательно, и получаемое от него напряжение будет всегда пропорционально измеряемой прибором величине - движок "следит" за ней.
Если в приборе системы д′Арсонваля заменить постоянный магнит мягким железом с наложенной на него обмоткой, причем размеры и форму магнитной цепи подобрать такими, чтобы при всех значениях тока в обмотке индукции в железе не выходили из части кривой намагничивания, соответствующей почти постоянному наименьшему удельному сопротивлению железа (фиг. 2), то получится ферродинамический прибор с равномерной шкалой, который и используется в предлагаемом устройстве.
Показания такого прибора будут пропорциональны произведению сил токов в обмотках и в рамке или квадрату силы тока, если по обмотке и рамке протекает одинаковый ток.
Для расширения пределов измерения обмотки как рамки, так и полюсов снабжаются набором шунтов, так смонтированных, чтобы при вставлении штепселя в то или иное гнездо возможно было сразу получать необходимую цену деления шкалы прибора.
Предельным положением движка 8 потенциометра соответствуют концевые выключатели 9, 9 (схема фиг. 3), останавливающие сервомотор и дающие звуковой или световой сигнал, свидетельствующий о том, что необходимо или изменить шунтом цену деления шкалы прибора, или же взять другое передаточное число от сервомотора к движку потенциометра, т.е. изменить масштаб ординат.
Схема электрических соединений "следящей" системы такого рода приведена на фиг. 3.
Положение движка 8 потенциометра, т.е. напряжение на зажимах А потенциометра, пропорционально показанию прибора. Следовательно, подавая статору измерительного прибора постоянное напряжение, получим на зажимах А потенциометра напряжение, пропорциональное силе тока в рамке или подведенному к ней напряжению, так как сопротивление рамки есть величина постоянная.
Возьмем ряд приборов, снабженных описанными "следящими" системами, и соединим их по схеме (фиг. 4). Статоры и рамки измерительных приборов обозначены соответственно римскими цифрами I, I … и II, II …, пунктирными же осями III, III … условно обозначены все остальные элементы каждой отдельной "следящей" системы, т.е. сервомотор с передачами, потенциометр и пр. Первый из показанных на схеме приборов снабжен дополнительным потенциометром Р, дающим возможность подать на рамку любое требуемое напряжение Е=Х, олицетворяющее собой независимую переменную.
При такой схеме соединения приборов на зажимах потенциометров А1, А2 … отдельных приборов будут получены напряжения, пропорциональные любой степени исходного напряжения, подведенного через дополнительный потенциометр Р к рамке первого прибора.
Очевидно, что вместо отдельных потенциометров можно взять общий потенциометр с соответствующим числом движков.
Передаточные числа сервомотора, шунты, балластные сопротивления и напряжения на потенциометрах могут быть подобраны таким образом, чтобы коэффициенты K1, K2 … по желанию могли принимать значения 1000; 100; 10; 1; 0,1; 0,01; 0,001 и т.д.
Каждую функцию можно разбить на участки, для которых она может быть выражена практически с достаточной степенью точности в виде многочлена, расположенного по восходящим степеням аргумента:

Соединим между собой все левые зажимы потенциометров А отдельных приборов общим проводом (фиг. 4) и подведем его к средней точке двухрамочного или двухсистемного (с общей осью) суммирующего прибора типа д′Арсонваля с равномерной шкалой, обозначенного буквой М на схеме фиг. 5.
Рамки суммирующего прибора М включены так, что дают отклонения прибора в противоположные стороны.
Зажимы потенциометров А подают напряжение, пропорциональное независимой переменной x в той или иной степени. Числовые коэфициенты а1, а2 … an подбираются при помощи магазинов сопротивлений (проводимостей) g, а также при помощи десятичных коэфициентов K1, K2 … Kn, которые выбираются такими, чтобы при помощи данных магазинов сопротивлений можно было получить любые значения для коэфициентов а1, а2 … an.
Две группы производимостей, приключаемые к отдельным рамкам суммирующего прибора М, соответствуют знакам  или - перед членами а1х, a2x2 …, чем и определяется выбор групп магазинов.
или - перед членами а1х, a2x2 …, чем и определяется выбор групп магазинов.
Для члена а0 берется напряжение
При выполнении всех вышеуказанных условий показание суммирующего прибора будет равно

Очевидно, что этим путем можно складывать и вычитать функции любого вида.
Снабжая прибор М следящей системой, можно показания его при помощи, например, ходового винта и каретки пишущего прибора записать в виде некоторой кривой, изображающей данную функцию:
или передать эти показания на следующий потенциометр для производства над ними последующих манипуляций.
Абсциссы кривой  получаются от сервомотора, приводящего в движение, с одной стороны, движок потенциометра, задающего х, а с другой стороны, через соответствующую зубчатую передачу или любым иным образом, ходовой винт, перемещающий каретку пишущего прибора, записывающего показания суммирующего прибора М.
получаются от сервомотора, приводящего в движение, с одной стороны, движок потенциометра, задающего х, а с другой стороны, через соответствующую зубчатую передачу или любым иным образом, ходовой винт, перемещающий каретку пишущего прибора, записывающего показания суммирующего прибора М.
Подавая показания суммирующих приборов на статор и рамку ферродинамического прибора и записывая при помощи следящей системы его показания, можно умножить и возводить в целую степень любые функции.
Решение уравнений с одним неизвестным.
Разлагая заданные функции в ряд Маклорена (или Тэйлора) и суммируя члены с одинаковыми степенями неизвестного, можно, оставляя пока открытым вопрос о сходимости рядов, любое заданное уравнение представить с любой степенью точности в виде ряда

Устанавливая проводимости g и изменяя х в требуемых пределах, можно определить точки пересечения кривой у=F(x) с осью абсцисс, которые и будут корнями данного уравнения, так как обращают его в тождество.
Уравнение с одним неизвестным может быть решено и другим способом. Разбиваем его на две части, равные друг другу  и вычерчиваем вышеуказанным способом кривые, соответствующие обеим частям уравнения; абсциссы точек пересечения этих кривых будут корнями заданного уравнения.
и вычерчиваем вышеуказанным способом кривые, соответствующие обеим частям уравнения; абсциссы точек пересечения этих кривых будут корнями заданного уравнения.
Вместо разложения функций в ряд по Маклорену или Тэйлору, в некоторых случаях можно сразу получить на потенциометре значение функции у, если связать х с движением некоторого шаблона или кулисного механизма.
Так, например, для получения функции  можно воспользоваться приспособлением фиг. 6, состоящим из двух направляющих 1. 1, в которых перемещаются пальцы 2, 2 рейки 3, несущей также палец 4, связанный с плечом, задающим x. Изменяя передаточное число от сервомотора к оси, задающей х, можно получить синусоиды различных периодов.
можно воспользоваться приспособлением фиг. 6, состоящим из двух направляющих 1. 1, в которых перемещаются пальцы 2, 2 рейки 3, несущей также палец 4, связанный с плечом, задающим x. Изменяя передаточное число от сервомотора к оси, задающей х, можно получить синусоиды различных периодов.
Аналогичные приспособления могут быть сконструированы и для других тригонометрических функций.
Можно также воспользоваться шаблонами из листового железа, снабженными прорезом (фиг. 7), изображающим некоторую экспериментальную кривую, например, кривую намагничивания, и таким образом непосредственно ввести ее в ход решения задачи.
Изготовление шаблонов такого рода имеет смысл в том случае, если приходится делать много вычислений, в которые входит одна и та же функция, заданная экспериментальной кривой.
При небольшом количестве вычисления изготовление шаблона нецелесообразно и без него можно обойтись, если вычертить в соответствующем масштабе заданную кривую и вручную заставить движок дающего ее потенциометра следить за ее ординатами в то время как абсциссы ее задаются сервомотором, дающим независимую переменную. Можно также представить заданную кривую целиком или частично, в виде ряда, расположенного по возрастающим степеням аргумента

Для этого следует приравнять частные значения у, соответствующие некоторым значениям х, и получить таким образом систему из n уравнения с n неизвестными, решая которую, определяют неизвестные коэффициенты ряда a0, a1, а2 …
Если желательно получить уравнение экспериментальной кривой с достаточной степенью точности, то необходимо взять значительное число членов ряда, а это приводит к необходимости решать систему многих уравнений со многими неизвестными, что не только утомительно, но и ненадежно, так как в процессе вычисления необходимо возникают погрешности, приводящие к наварному результату.
В большинство технических расчетов входят те или иные экспериментальные кривые, поэтому является весьма желательным иметь возможность достаточно быстро и легко находить их уравнения.
Эта задача, сводящаяся, как было показано, к решению системы уравнений первого порядка, может быть разрешена при помощи предлагаемого устройства нижеследующим способом, одинаково пригодным для решения системы уравнений и высших степеней.
Решение систем уравнений любого порядка.
Рассмотрим систему уравнений 1-го порядка со многими неизвестными:
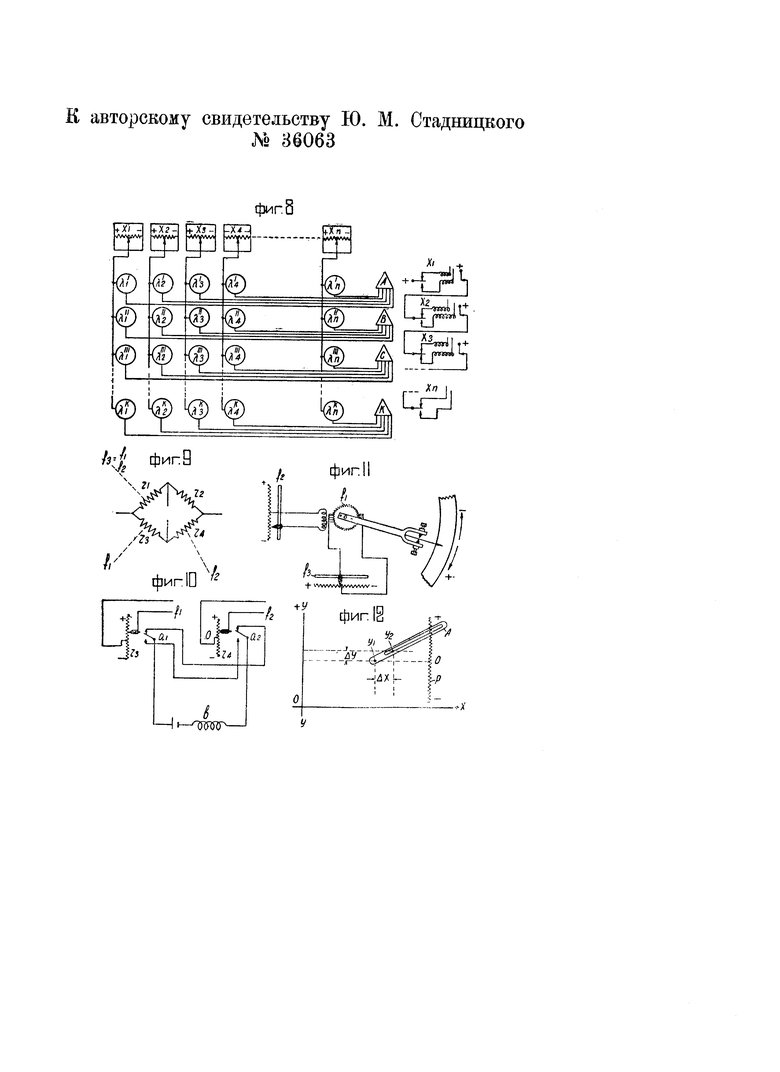
Схема соединений приборов, эквивалентная данной системе уравнений, при использовании принципа следящих систем, приведена на фиг. 8.
При произвольных положениях движков на потенциометрах х, соответствующих неизвестным х1, х2 … xn, на магазинах λ устанавливаются проводимости, равные соответствующим коэффициентам системы уравнений,
Подвижные контакты следящих систем суммирующих приборов А, В, С, … K закрепляются в положениях, соответствующих свободным членам А, В, С, … K.
Тогда стрелка суммирующего прибора А замкнет один из подвижных контактов и включит сервомотор потенциометра х1; при этом сервомотор будет перемещать движок потенциометра х1 до тех пор, пока стрелка суммирующего прибора А не придет в промежуточное положение и оба подвижных контакта прибора не окажутся разомкнутыми.
Последовательно с обмотками сервомоторов, управляющих перемещением движков потенциометров, задающих х1, х2, x3 …, включены согласно действующие обмотки двух обмоточных реле по схеме, приведенной на правой стороне фиг. 8. Поэтому, когда стрелка суммирующего прибора А займет промежуточное положение, т.е. когда система приборов, соответствующая первому уравнению, будет в равновесии, то обмотки первого реле, включенные последовательно с обмотками сервомотора, задающего х1, окажутся без тока и реле отпустит якорь, вследствие чего замкнется контакт, подающий напряжение на стрелку суммирующего прибора следующего уравнения. Таким образом, система В может дать движение потенциометру х2 только в том случае, если потенциометр х1 находится в покое, т.е. если уравнение 1 при данных частных значениях х1, х2 … xn удовлетворено. Описанные реле сервомоторов отдельных потенциометров относятся к типу реле с выдержкой времени, так как колебания стрелки измерительного прибора каждой предыдущей суммирующей следящей системы возле положения равновесия не должны вызывать излишних пусков последующей суммирующей следящей системы.
Всякое передвижение последующей следящей системы нарушает равновесие в предыдущих системах, что автоматически вызывает остановку последующей системы и обусловливает необходимость последовательного перемещения во всех предыдущих системах, начиная с первой, до момента восстановления в них равновесия, после чего последующая система опять приходит в движение и т.д. до тех пор, пока все системы не придут последовательными перемещениями в некоторое положение равновесия и не остановятся. Значения неизвестных х1, х2, x3 … xn при этом определятся непосредственно положением соответствующих движков потенциометров X.
Если положение равновесия не может быть достигнуто в продолжение долгого промежутка времени, то надо или переменить порядок следования одного уравнения за другим (т.е. одной из систем приборов А, В, С … K за другой) или взять другие произвольные исходные значения неизвестных х1, х2, x3 … xn.
Изложенный механизм решения системы уравнений может быть представлен геометрически как последовательный переход с одной линии пересечения некоторых поверхностей многомерного пространства на другую до тех пор, пока не будет найдена точка, общая для всех поверхностей. Координаты этой точки и будут решениями данной системы уравнений.
Если система нелинейна, то принцип решения системы уравнений останется неизменным; в соответствии с вышеизложенным потребуется лишь включение между потенциометрами X и проводимостями λ следящих систем, дающих соответствующие степени неизвестных.
Если равновесие достигнуто быть не может, то это значит, что заданные поверхности в многомерном пространстве не пересекаются и, следовательно, данная система решений не имеет.
Деление функций.
1-й способ. Для использования предлагаемого устройства для деления функций может быть введено дополнительное приспособление в виде мостика Уитстона (фиг. 9), в котором 
Величина сопротивления r2 берется разной 1, 10, 100 … и играет роль масштаба.
Движки реостатов r3 и r4 управляются следящими системами  и
и 
При отсутствии тока в цепи гальванометра положение движка сопротивления r1 определяется частным 
Для использования мостика для деления функции заменяем гальванометр чувствительным поляризованным реле, якорь которого замыкает тот или иной контакт в зависимости от направления тока в реле, т.е. в зависимости от соотношения величин  и
и  в данный момент, чем и определяется направление вращения сервомотора, перемещающего движок сопротивления r1 и параллельно каретку пишущего прибора, так что показанию движка r1 отвечает
в данный момент, чем и определяется направление вращения сервомотора, перемещающего движок сопротивления r1 и параллельно каретку пишущего прибора, так что показанию движка r1 отвечает 
Сопротивление r1 следит только за абсолютными величинами  и
и  независимо от их знака, а так как они могут иметь различные знаки, то необходимо предусмотреть соответствующую схему блокировки, обеспечивающую необходимый знак функции
независимо от их знака, а так как они могут иметь различные знаки, то необходимо предусмотреть соответствующую схему блокировки, обеспечивающую необходимый знак функции 
Такая схема приведена на фиг. 10, в соответствии с которой движки потенциометров, задающих функции  и
и  при переходе через 0, т.е. при перемене знака функции, переводят переключатели a1 и а2 из одного положения в другое и оставляют их в таком положении на все время, пока движок потенциометра находится на данной половине последнего.
при переходе через 0, т.е. при перемене знака функции, переводят переключатели a1 и а2 из одного положения в другое и оставляют их в таком положении на все время, пока движок потенциометра находится на данной половине последнего.
Если оба движка находятся одновременно на положительных или одновременно на отрицательных половинах потенциометров, т.е. функции  и
и  обе положительны или обе отрицательны при данном значении x, то согласно схеме фиг. 10 цепь электромагнита b окажется замкнутой; если же одна из функций станет отрицательной, то цепь электромагнита будет разомкнутой. В соответствии с этим электромагнит b будет включать или выключать паразитную шестеренку в зубчатую передачу от сервомотора, приводящего в движение движок потенциометра или каретку пишущего прибора, задающего
обе положительны или обе отрицательны при данном значении x, то согласно схеме фиг. 10 цепь электромагнита b окажется замкнутой; если же одна из функций станет отрицательной, то цепь электромагнита будет разомкнутой. В соответствии с этим электромагнит b будет включать или выключать паразитную шестеренку в зубчатую передачу от сервомотора, приводящего в движение движок потенциометра или каретку пишущего прибора, задающего  и тем самым менять направление движения сервомотора, или, что то же, знак функции
и тем самым менять направление движения сервомотора, или, что то же, знак функции 
Так как функции  и могут быть как положительными, так и отрицательными, то переключатели должны нести по второй паре контактов и, аналогично предыдущему, изменять направление движения движков сопротивления r3 и r4 при переходе движков потенциометров и через 0.
и могут быть как положительными, так и отрицательными, то переключатели должны нести по второй паре контактов и, аналогично предыдущему, изменять направление движения движков сопротивления r3 и r4 при переходе движков потенциометров и через 0.
Очевидно, что как числитель, так и знаменатель дроби  могут быть представлены в виде произведения любого числа функций, т.е. в виде
могут быть представлены в виде произведения любого числа функций, т.е. в виде
2-й способ. Предлагаемое устройство дает возможность производства деления функций и без введения в схему вспомогательного приспособления в виде мостика Уитстона при условии соединения приборов по схеме фиг. 11.
Ток в статоре измерительного прибора задается следящей системой Движение вилки с контактами задается . Тогда стрелка прибора управляет движением движка подбирая значения  так, чтобы всегда было соблюдено равенство
так, чтобы всегда было соблюдено равенство
С движком  , через соответствующую зубчатую передачу или любым иным образом, связана каретка пишущего прибора, вычерчивающего в требуемом масштабе функцию .
, через соответствующую зубчатую передачу или любым иным образом, связана каретка пишущего прибора, вычерчивающего в требуемом масштабе функцию .
Так как и могут быть одновременно как одинаковых, так и различных знаков, то для обеспечения правильного знака необходимо предусмотреть блокирующее устройство, аналогичное приведенному в описании способа деления функций по методу мостика Уитстона.
Извлечение квадратного корня из функций.
Для извлечения квадратного корня из функций соединение отдельных приборов предлагаемого устройства может быть произведено равным образом при помощи мостика Уитстона (фиг. 9) или, в соответствии с дальнейшим изложением, при помощи схемы фиг. 4. В случае мостика Уитстона величину сопротивления r4 берем постоянной и равной 1, 100, 10000 … и используем ее в качестве масштаба.
Тогда получим, что  или при
или при 
 и
и 
Величина r1 задается следящей системой данной функции.
Величина  и связанная с ней каретка пишущего прибора или потенциометра, дающего искомую функцию
и связанная с ней каретка пишущего прибора или потенциометра, дающего искомую функцию  приводится в движение от сервомотора, управляемого поляризованным реле, включаемым в диагональ мостика вместо гальванометра.
приводится в движение от сервомотора, управляемого поляризованным реле, включаемым в диагональ мостика вместо гальванометра.
Иногда  может принимать отрицательные значения, тогда φ(x) будет величиной мнимой.
может принимать отрицательные значения, тогда φ(x) будет величиной мнимой.
Для выявления этого условия движок потенциометра, задающий  снабжается переключателем, изменяющим при переходе через 0 направление движения как движка r1, так и движков r2 и r3. При этом φ(х) отложится в противоположном направлении, но будет обозначать не отрицательную величину, а мнимую.
снабжается переключателем, изменяющим при переходе через 0 направление движения как движка r1, так и движков r2 и r3. При этом φ(х) отложится в противоположном направлении, но будет обозначать не отрицательную величину, а мнимую.
Извлечение корня любой степени.
Извлечение корня представляет собой действие, обратное возвышению в степень. Поэтому, взяв схему, аналогичную схеме фиг. 4, и имея заданным значение функции на зажимах А соответствующего потенциометра, можно при помощи следящей системы подобрать такие значения  чтобы всегда было соблюдено равенство
чтобы всегда было соблюдено равенство  где
где  - некоторый постоянный коэффициент, выражающий принятые масштабы.
- некоторый постоянный коэффициент, выражающий принятые масштабы.
Для соблюдения знаков и для отсчета мнимых значений необходимо предусмотреть соответствующую схему блокировки.
Так как всегда справедливо
то очевидно, что изложенные способы дают возможность, комбинируя элементы схемы, возвышать функции в степень t и извлекать из функций корень степени t, причем t может быть любым положительным или отрицательным и одновременно целым или дробным числом.
Дифференцирование функций.
Если функция задана в виде ряда  , то дифференцирование ее не представляет труда и результат напишется в следующем виде
, то дифференцирование ее не представляет труда и результат напишется в следующем виде
новая кривая может быть вычерчена при помощи вышеизложенных способов.
Этот же результат может быть получен и другим чисто механическим путем.
Возьмем вместо бесконечно малой dx достаточно малый отрезок оси х, равный Δх, и будем считать его величиной постоянной. Тогда величина  будет пропорциональна Δу для всякого участка Δх и коэффициент пропорциональности будет
будет пропорциональна Δу для всякого участка Δх и коэффициент пропорциональности будет  т.е. получим, что
т.е. получим, что  , где
, где  есть некоторая неизменно постоянная величина.
есть некоторая неизменно постоянная величина.
Для использования предлагаемого устройства для дифференцирования функций служит дополнительное приспособление, представленное схематически на фиг. 12.
Буквами у1 и у2 отмечены две каретки, установленные на планшете пишущего прибора и связанные со следящими системами, задающими соответственно  и
и  . Направляющие кареток у1 и у2 жестко скреплены между собою на расстоянии х и могут перемещаться вдоль оси х только совместно, тогда как сами каретки могут перемещаться по направляющим вдоль оси у в зависимости от воздействия на них соответствующих следящих систем. На конце оси, несущей пишущее острие y1, шарнирно укреплен рычаг А с продольным прорезом, в котором могут скользить конец оси пишущего острия у2 и палец движка потенциометра Р, связанного с кареткой у1. Очевидно, что, при одновременной подаче на каретку
. Направляющие кареток у1 и у2 жестко скреплены между собою на расстоянии х и могут перемещаться вдоль оси х только совместно, тогда как сами каретки могут перемещаться по направляющим вдоль оси у в зависимости от воздействия на них соответствующих следящих систем. На конце оси, несущей пишущее острие y1, шарнирно укреплен рычаг А с продольным прорезом, в котором могут скользить конец оси пишущего острия у2 и палец движка потенциометра Р, связанного с кареткой у1. Очевидно, что, при одновременной подаче на каретку  , а на каретку
, а на каретку  , рычаг А повернется около оси y1 на угол определяемый разностью ординат y и y+Δy, и установит движок потенциометра Р на расстоянии от нулевой точки, пропорциональном Δy, а так как
, рычаг А повернется около оси y1 на угол определяемый разностью ординат y и y+Δy, и установит движок потенциометра Р на расстоянии от нулевой точки, пропорциональном Δy, а так как  то движок потенциометра Р при воспроизведении каретками у1 и у2 кривой
то движок потенциометра Р при воспроизведении каретками у1 и у2 кривой  неизменно будет давать величину, пропорциональную
неизменно будет давать величину, пропорциональную  т.е. первой производной рассматриваемой функции .
т.е. первой производной рассматриваемой функции .
Производная  при передаче показаний потенциометра Р на особую следящую систему может быть записана на пишущем приборе, управляемом названной следящей системой.
при передаче показаний потенциометра Р на особую следящую систему может быть записана на пишущем приборе, управляемом названной следящей системой.
Не трудно видеть, что точность работы описанного приспособления может быть повышена за счет увеличения длины рычага А или применением соответствующих вспомогательных устройств.
Если вычерчивать функцию  не в виде непрерывной линии, как то следует из вышеприведенного описания, а по точкам, которые могут лежать произвольно близко одна от другой, то можно вместо двух комплектов приборов, задающих соответственно
не в виде непрерывной линии, как то следует из вышеприведенного описания, а по точкам, которые могут лежать произвольно близко одна от другой, то можно вместо двух комплектов приборов, задающих соответственно  и
и  , пользоваться одним комплектом приборов, который задает у в функции от x, и посредством соответствующей комбинации реле, с одной стороны, переключать значение y сначала на переднюю каретку y2, а потом на заднюю каретку y1, а с другой стороны, прижимать перо пишущего прибора к бумаге только на момент отсчета, соответствующий положению кареток у1 и у2, при разности их абсцисс, равной Δx.
, пользоваться одним комплектом приборов, который задает у в функции от x, и посредством соответствующей комбинации реле, с одной стороны, переключать значение y сначала на переднюю каретку y2, а потом на заднюю каретку y1, а с другой стороны, прижимать перо пишущего прибора к бумаге только на момент отсчета, соответствующий положению кареток у1 и у2, при разности их абсцисс, равной Δx.
Очевидно, что для получения производных более высокого порядка такой процесс необходимо повторить соответствующее число раз, так как всегда справедливо равенство
и, следовательно, для получения производной следующего порядка необходимо полученную кривую подать на аналогичный пишущий прибор с двумя каретками.
Если нет надобности записывать кривые производных, то конструкции приборов могут быть значительно упрощены, так как для самого процесса дифференцирования нет никакой необходимости в перемещении сдвоенных кареток вдоль оси х.
Интегрирование функций.
Интегрирование есть действие, обратное дифференцированию. Поэтому, если заставить конец рычага А (фиг. 12) следить за функцией F(x), то каретки у1 и у2 при постоянном расстоянии между ними, равном Δ(х), вычертят две кривые, сливающиеся одна с другой и дающие
так как для любого значения х будет справедливо равенство
Исходное положение каретки определяется постоянной интегрирования, которая и дает начальные условия.
Очевидно, что при многократном интегрировании необходимо повторение такого процесса соответствующее число раз; при этом нет необходимости в записи промежуточных результатов, что значительно упростит аппаратуру.
Интегрирование дифференциальных уравнений.
Используя предлагаемое устройство в соответствии с изложенными способами, можно составить схему, эквивалентную любому дифференциальному уравнению алгебраического вида, которое может быть написано следующим образом:

Левая часть уравнения подается на суммирующий прибор с двусторонней шкалой и следящей системой, подвижные контакты которой жестко закреплены на нуле. Тогда стрелка суммирующего прибора, прикасаясь к тому или иному контакту, заставит сервомотор, перемещающий движок потенциометра, дающего у, вращаться в таком направлении (при помощи блокирующих устройств, учитывающих знаки отдельных функций), чтобы стрелка суммирующего прибора стремилась стать на нуль. После того, как это положение равновесия будет достигнуто, всякому конечно малому изменению Δх независимой переменной будет соответствовать вполне определенное, автоматически устанавливающееся значение у и его производных, и, таким образом, на планшете пишущего прибора может быть записан искомый интеграл уравнения в виде кривой  причем произвольные постоянные интегрирования определяют начальные положения кареток
причем произвольные постоянные интегрирования определяют начальные положения кареток 
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКООРДИНАТНОЕ ГРАФИЧЕСКОЕ УСТРОЙСТВО | 1967 |
|
SU200909A1 |
| Следящее устройство | 1936 |
|
SU59010A1 |
| Способ определения поверхности диэлектрической бифокальной линзовой антенны | 2019 |
|
RU2715914C1 |
| ПРИБОР ДЛЯ ТОЧЕЧНОГО ПРЕОБРАЗОВАНИЯ | 1968 |
|
SU211106A1 |
| Устройство для автоматического управления механизмами машин-орудий | 1937 |
|
SU55814A1 |
| Приспособление к фотометру для непосредственного отсчета световых характеристик источников света | 1935 |
|
SU47832A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ ВОДОРОДНЫХ ИОНОВ | 1929 |
|
SU22327A1 |
| АВТОМАТИЧЕСКОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1934 |
|
SU45663A1 |
| Устройство для решения дифференциальных уравнений | 1937 |
|
SU57020A1 |
| Автоматический регулятор для шунтовых двигателей | 1937 |
|
SU52269A1 |
1. Устройство для автоматического производства приближенных вычислений, отличающееся применением ряда следящих систем, из которых каждая состоит из ферродинамического электроизмерительного прибора А (фиг. 1), с осью которого совпадает по направлению ось 1, приводимая во вращение в ту или другую сторону сервомотором 3, для включения которого в электрическую цепь стрелкой прибора А применены два подвижных контакта 5, 5 на вилке 2, жестко связанной с осью 1 с тою целью, чтобы связанный с вращением сервомотора 3 (фиг. 3) движок 8 потенциометра автоматически повторял на зажимах потенциометра в некотором масштабе величины, задаваемые рамке электроизмерительного прибора А в виде напряжения Е, отвечающие независимой переменной x, из каковых следящих систем потенциометр одной системы служит для подачи напряжения ряду последовательно-параллельно включенных следящих систем с потенциометрами А1, А2, А3 … (фиг. 4) с целью получения на зажимах последних напряжений, пропорциональных любой степени исходного напряжения или любой степени независимой переменной, причем в цепь включен двухрамочный суммирующий прибор М (фиг. 5) для получения суммарного значения набранной на отдельных следящих системах функции, отвечающего разложению ее в ряд Меклорена или Тэйлора, при фиксировании числовых коэфициентов при помощи магазинов g сопротивлений, включаемых последовательно к раме прибора М, а также при помощи шунтов и балластных сопротивлений составляющих следящих систем, для записи же показания суммирующего прибора М применена дополнительная следящая система.
2. Видоизменение устройства по п. 1 для случая решения системы уравнений любого порядка, отличающееся последовательно-параллельным включением к суммирующим приборам А, В, С, … К (фиг. 8), закрепляемым в положениях, отвечающих значению свободных членов уравнений потенциометров X, соответствующих неизвестным х1, х2, х3 … xn, через магазины сопротивлений λ, отвечающие числовым коэффициентам системы уравнений.
3. Видоизменение устройства по п. 1 для случая умножения или деления функций, отличающееся применением двух суммирующих приборов (фиг. 11), служащих для подачи напряжений на рамку и на статор измерительного прибора.
4. Видоизменение устройства по п. 1, отличающееся применением схемы мостика Уитстона (фиг. 9), одно плечо которого служит масштабом, два других плеча соответствуют заданным функциям  и
и  , а для подбора функции, соответствующей четвертому плечу, применена следящая система, управляемая реле g, включенным в диагональ мостика.
, а для подбора функции, соответствующей четвертому плечу, применена следящая система, управляемая реле g, включенным в диагональ мостика.
5. В устройстве по п. 1, в случае, диференцирования функций, применение приспособления в виде пишущего прибора (фиг. 12) с двумя каретками y1 и у2, скрепленными между собою на конечно малом расстоянии Δx и могущими перемещаться независимо одна от другой только по направляющим вдоль оси у, причем соединяющий каретки у1 и у2 шарнирный рычаг А, снабженный продольным прорезом, в котором ходит каретка у2, служит для установки движка потенциометра Р.
