I
Изобретение относится к п)узоподъемным машинам и касается конструирования устройств контроля устойчивости стреловых подъемных кранов.
Известны устройства контроля устойчивости стрелового подъемного крана, в котором применены опорные датчики, регастрирующие опорные реакции крана 1.
Недостаток указанного устройства заключается в низкой точности регистрации нагрузок.
Наиболее близким решением из известных является устройство контроля устойчивости стрелового подъемного крана, содержащее макетную раму, контур которой подобен контуру крана, опорные датчики, регистрирующие величины нормальных реакций крана, возникающих на его опорах, гибкие тяги и приводы натяжения гибких тяг 2J.
Недостаток указанного устройства заключается в невозможности непрерывного наблюдеш1я за устойчивостью крана и предотвращения его опрокидьгоания.
Цель изобретения - устранение указанных недостатков.
Для этого опорные дапики установлены на макетной раме в углах ее контура, а гибкие тяга связаны с приводами натяжения гибких тяг и между собой в одном узле, находящемся в контуре опорных датчиков макетной рамы.
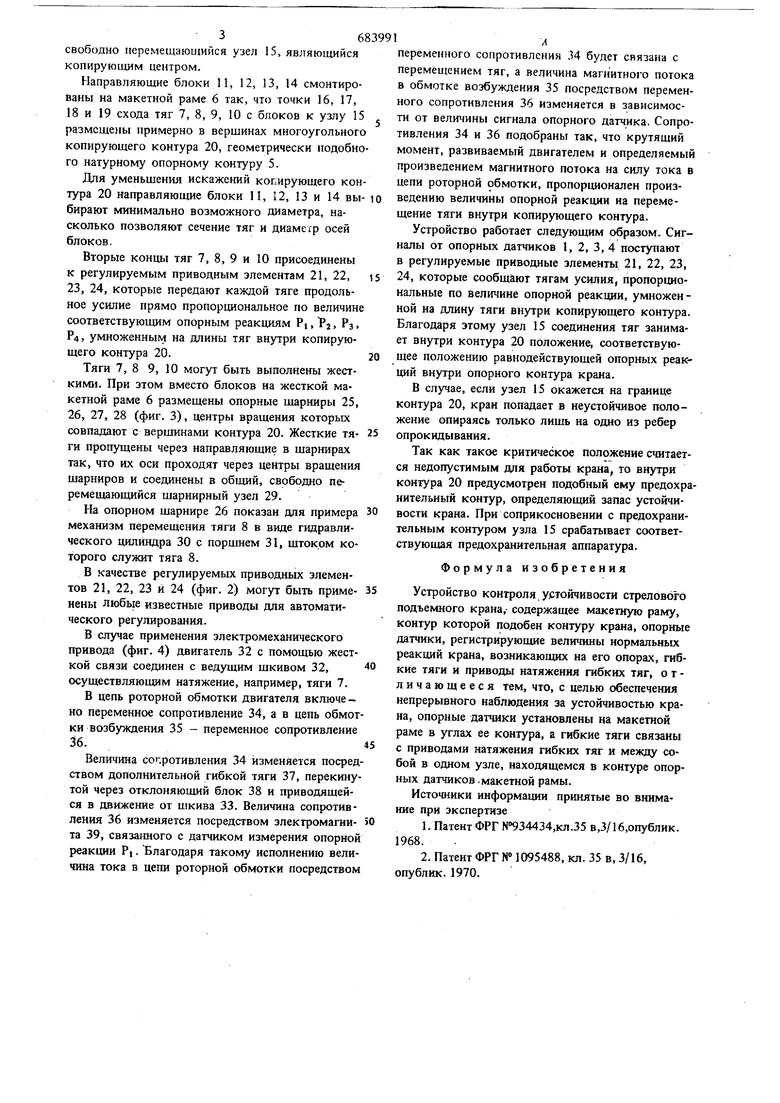
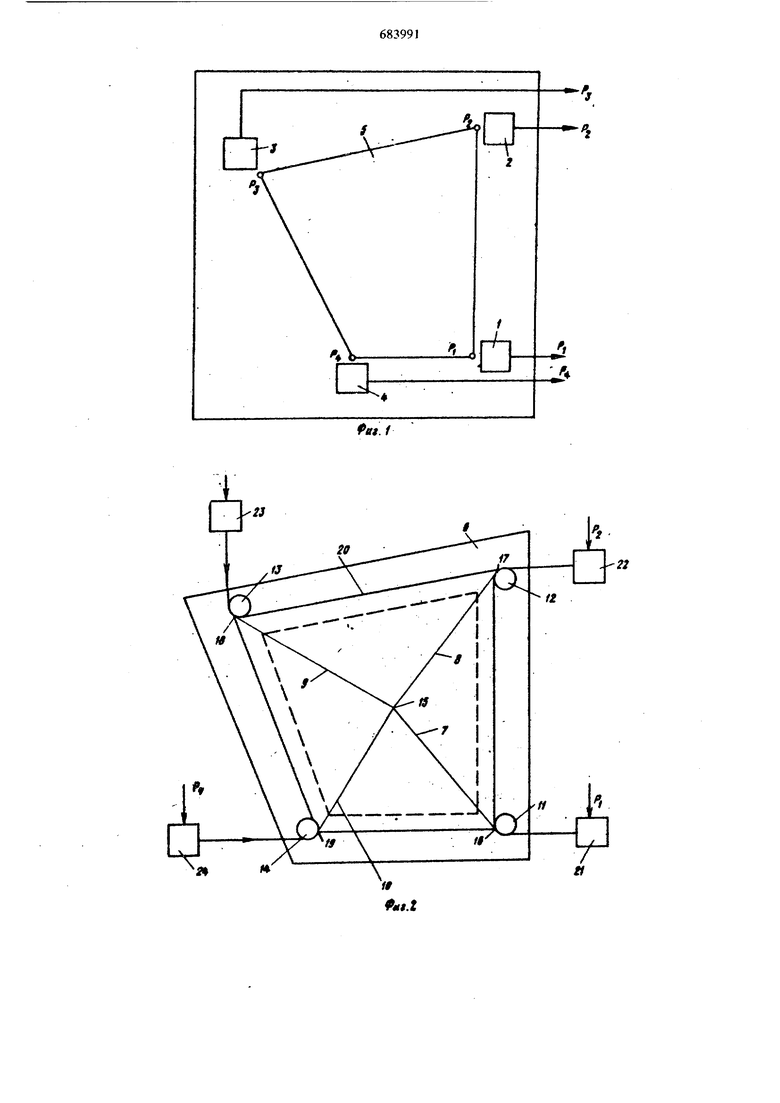
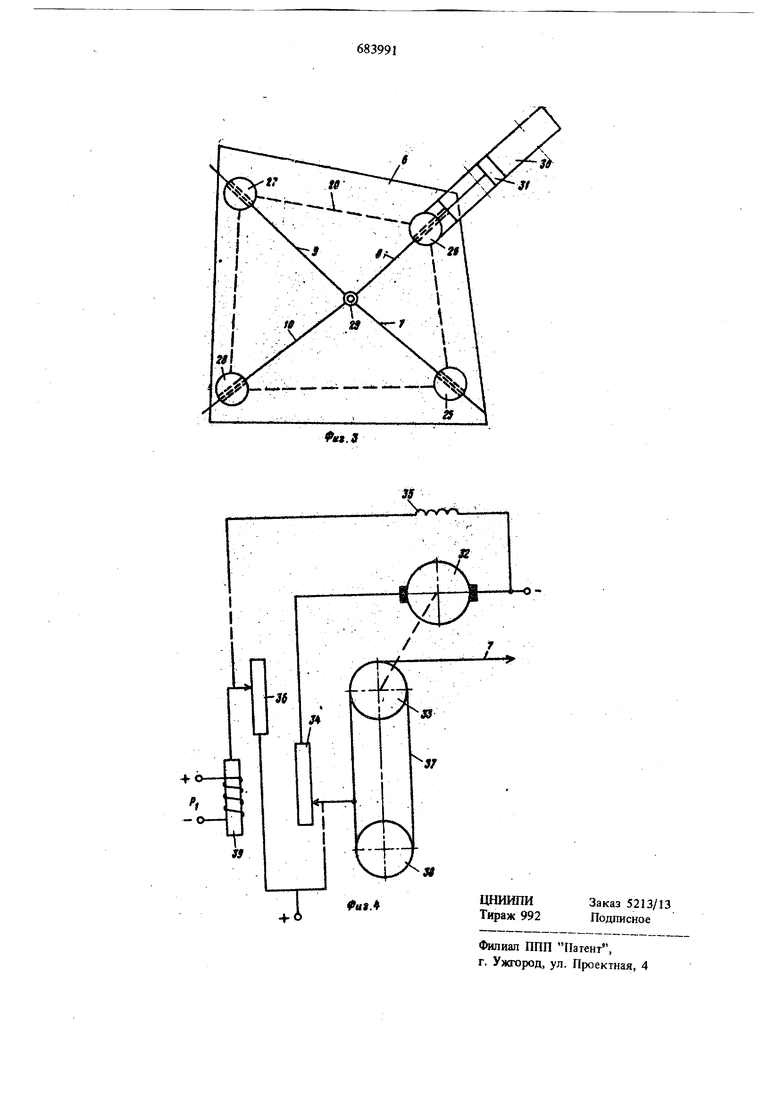
На фет. 1 изображена схема натурного опорного KOHTj-pa стрелового подъемного крана; на фиг. 2 изображена схема копирующего контура и привода тяг; на фиг. 3 изобраисен копирующий контзф с жестким тягами; на фиг. 4 изображена схема автоматического злектромеханического привода тяг.
Устройство контроля устойчивости стрелового подъемного крана содержит опорные датчики 1, 2, 3 и 4 (фиг. 1), регистрирующие величины нор5мальных опорных реакций крана; Р|, Р2, РЗ, Р4 возникающих на его опорах.Точки расположения опорных датадков 1, 2, 3, 4 образуют натуртш опорный контур 5 крана, а его стороны являются ребрами опроюздывания крана.
Устройство контроля устойчивости содержит также макетную раму 6 (фиг. 2) и гибкие тяги 7,8, 9 к 10, которые проходят через направляющие блоки 11, 12, 13 14 и соединяются в один 368 свободно перемещаюшийся узел 15, являющийся копирующим центром. Направляющие блоки 11, 12, 13, 14 смонтированы на макетной раме 6 так, что точки 16, 17, 18 и 19 схода тяг 7, 8, 9, 10 с блоков к уалу 15 размещены примерно в верщинах многоугольного копирующего контура 20, геометрически подобно го натурному опорному контуру 5. Для уменьшения искажений копирующего контура 20 направляющие блоки 11, 12, 13 и 14 выбирают минимально возможного диаметра, насколько позволяют сечение тяг и диаметр осей блоков. Вторые концы тяг 7, 8, 9 и 10 присоединены к регулируемым приводным элементам 21, 22, 23, 24, которые передают каждой тяге продольное усилие прямо пропорциональное по величине соответствующим опорным реакциям Р 1,, РЗ. Р4, умноженным на длины тяг внутри копирующего контура 20. Тяги 7, 8 9, 10 могут быть выполнены жесткимя. При этом вместо блоков на жесткой макетной раме 6 размещены опорные щарниры 25, 26, 27, 28 (фиг. 3), центры вращения которых совпадают с вершинами контура 20. Жесткие тяги пропущены через направляющие в шарнирах так, что их оси проходят через центры вращения шарниров и соединены в общий, свободно перемещающийся шарнирный узел 29. На опорном шарнире 26 показан для примера механизм перемещения тяги 8 в виде гидравлического цилиндра 30 с порщнем 31, штоком которого служит тяга 8. В качестве регулируемых приводных злементов 21, 22, 23 и 24 (фиг. 2) могут быть примейены любью известные приводы для автоматического регулирования. В случае применения электромеханического привода (фиг. 4) двигатель 32 с помощью жесткой связи соединен с ведущим щкивом 32, осуществляющим натяжение, например, тяги 7. В цепь роторной обмотки двигателя включено переменное сопротивление 34, а в цепь обмот ки возбуждения 35 - переменное сопротивление 36. Величина сопротивления 34 изменяется посред ством дополнительной гибкой тяги 37, перекину той через отклоняющий блок 38 и приводящейся в движение от шкива 33. Величина сопротивления 36 изменяется посредством электромагнита 39, связштого с датчиком измерения опорной реакции PI . Благодаря такому исполнению величина тока в цепи роторной обмотки посредством переменного сопротивления 34 будет связана с перемещением тяг, а величина магнитного потока в обмотке возбуждения 35 посредством переменного сопротивления 36 изменяется в зависимости от величины сигнала опорного датчика. Сопротивления 34 и 36 подобраны так, что крутящий момент, развиваемый двигателем и определяемый произведением магнитного потока на силу тока в цепи роторной обмотки, пропорционален произведению величины опорной реакции на перемещение тяги внутри копирующего контура. Устройство работает следующим образом. Сигналы от опорных датчиков 1, 2, 3, 4 поступают в регулируемые приводные элементы 21, 22, 23, 24, которые сообщают тягам усилия, пропорциональные по величине опорной реакции, умноженной на длину тяги внутри копирующего контура. Благодаря этому узел 15 соединения тяг занимает внутри контура 20 положение, соответствующее положению равнодействующей опорных реакций внутри опорного контура крана. В случае, если узел 15 окажется на границе контура 20, кран попадает в неустойчивое положение опираясь только лишь на одно из ребер опрокидывания. Так как такое критическое положение считается недопустимым для работы крана, то внутри контура 20 предусмотрен подобный ему предохранительный контур, определяющий запас устойчивости крана. При соприкосновении с предохранительным контуром узла 15 срабатывает соответствующая предохранительная аппаратура. Формула изобретения Устройство контроля, устойчив ости стрелового подъемного крана,- содержащее макетную раму, контур которой подобен контуру краиа, опорные датчики, регистрирующие величины нормальных реакций крана, возникающих на его опорах, гибкие тяги и приводы натяжения гибких тяг, о т личающееся тем, что, с целью обеспечения непрерывного наблюдения за устойчивостью крана, опорные датчики установлены на макетной раме в углах ее контура, а гибкие тяги связаны с приводами натяжения гибких тяг и между собой в одном узле, находящемся в контуре опорных датчиков .макетной рамы. Источники информации принятые во внимание при экспертизе 1.Патент ФРГ М 934434,кл.35 в,3/16,опублик. 1968. 2.Патент ФРГ N 1095488, кл. 35 в, 3/16, опублнк. 1970.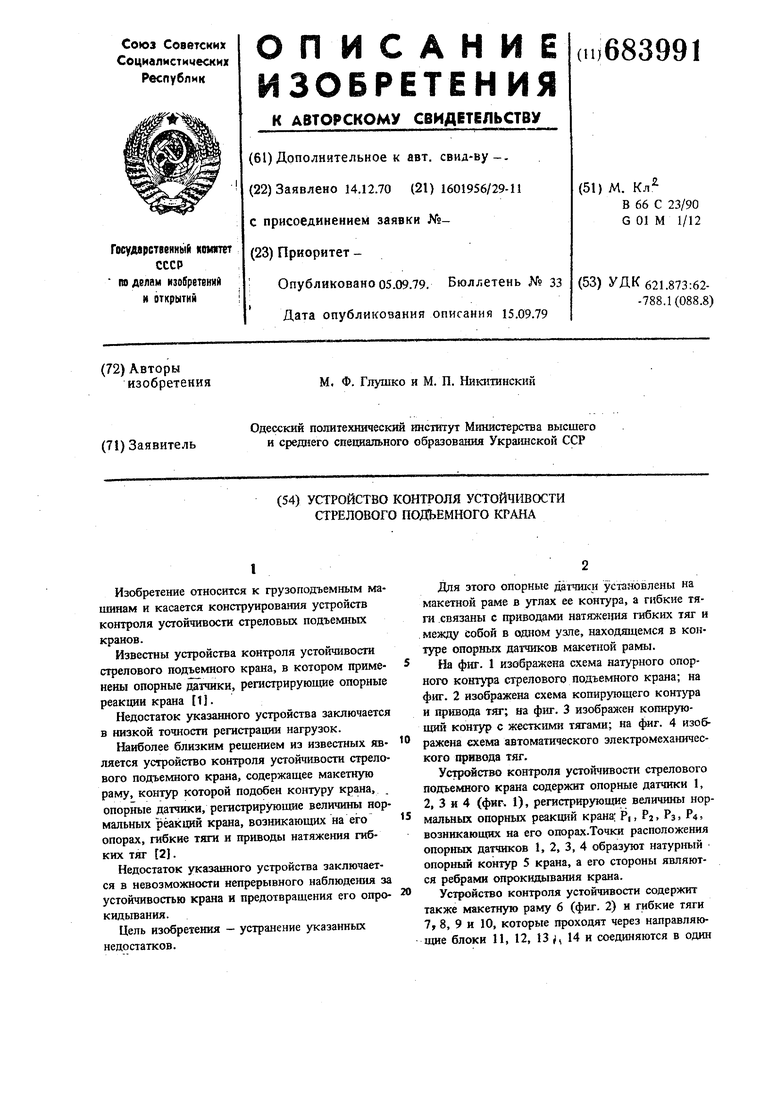
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля устойчивости стрелового подъемного крана | 1970 |
|
SU492155A1 |
| Устройство для контроля устойчивости стрелового подъемного крана | 1973 |
|
SU506571A1 |
| КРАН, А ТАКЖЕ СПОСОБ КОНТРОЛЯ УСТРОЙСТВА ПРЕДОХРАНЕНИЯ ОТ ПЕРЕГРУЗОК УКАЗАННОГО КРАНА | 2016 |
|
RU2709322C2 |
| БАШЕННЫЙ СТРЕЛОВОЙ КРАН | 2005 |
|
RU2290362C1 |
| СИСТЕМА КОНТРОЛЯ ГРУЗОВОЙ УСТОЙЧИВОСТИ МОБИЛЬНЫХ ГРУЗОПОДЪЕМНЫХ МАШИН | 2004 |
|
RU2267458C1 |
| Устройство для контроля вертикальности полиспаста стрелового крана | 1988 |
|
SU1572981A1 |
| Устройство контроля устойчивости стрелового подъемного крана | 1973 |
|
SU492469A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| Предохранительное устройство стрелового крана | 1984 |
|
SU1211209A1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
7
a
