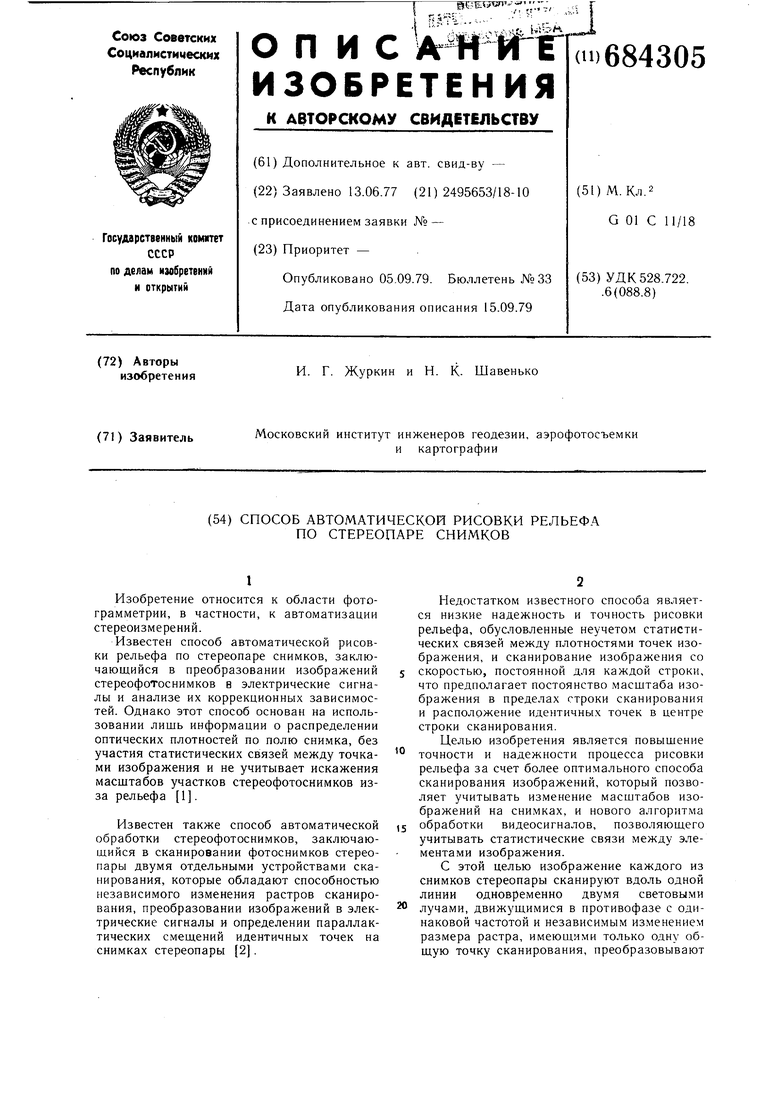
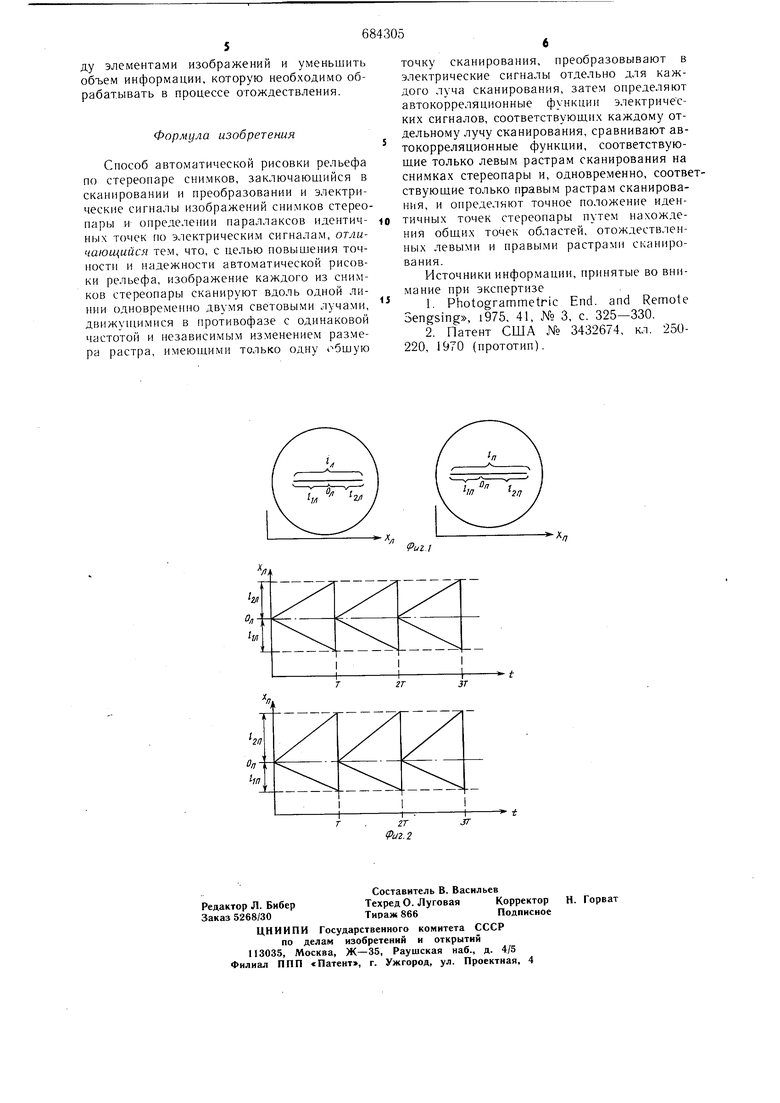
в электрические сигналы отдельно для каждого .|уча сканирования, затем онределяют автокорреляционные функции электрических сигналов, соответствующих каждому отдельному лучу сканирования, сравнивают автокор)еляциоиные функции, соответствующие только левым растрам сканирования на снимках стереопары неодновременно, соответствующие только правым растрам сканирования, и определяют точное положение общих точек областей, отождествленных левыми и правыми растрами сканирования. На фиг. 1 представлены экраны двухлучевых электронно-лучевых трубок (ЭЛТ), светящиеся точки с которых проектируются на снимки стереопары. Растр сканирования каждой Э.ЛТ представляет собой прямую линию ( левом снимке и in на нравом снимке), образованную совместно двумя лучамн сканирования. Левый растр сканирования , состоит из растра ,л, образованного одним лучом сканирования,.и растра л, образованного другим лучом сканирования. Аналогично правый растр сканирования п состоит из растра fin, образованного одним лучом сканирования, и растра „, образованного другим лучом сканирования. Оба луча на экране каждой ЭЛТ имеют только одну, общую точку, в которой они сходятся только один раз за период сканирования (точка 0л на левом снимке и точка On на правом снимке). Размеры растров, образуемых каждым из лучей, могут независимо изменяться, но при этом всегда остается одна общая точка для растров, расположенных на экране одной и той же Э.ПТ. Период сканирования каждого луча остается . постоянным независимо от размеров растра. Временные диаграммы движения сканирующ.их лучей для правой и левой ЭЛТ представлены на фиг. 2. В начальный момент времени оба луча находятся в общей точке (ОА - для левой ЭЛТ и 0л - для правой ЭЛТ), затем они начинают двигаться в противоположные стороны (т. е. двигаются в противофазе) со скоростью, определяемой величиной растров каждого луча и периодом (частотой) развертки. Достигнув краев растров, т. е. пройдя путь для левого луча для правого луча (левая ЭЛТ) и левого луча и путь i jnA-Tfl правого луча (правая ЭЛТ), лучи одновременно возвращаются в общую точку (Од - для левой ЭЛТ и Оп - для правой ЭЛТ). Аналогично двигаются лучи и в последующие периоды. В процессе работы возможны изменения размеров растров и положения общей точки (см. фиг. 2). В процессе автоматической рисовки релье фа производится преобразование оптической информации аэрофотоснимков и электрические сигналы, при считывании производится раздельно для каждого луча сканирования. Затем заполняется отождествление участков изображения на снимках стереоriapi), приче.м отождествление производится раздельно для участков изображения, сканируемых левыми растрами, т. е. растрами г,л и и для участков изображения, сканируе.мых правыми растра.ми, т. Q.. Отождествление выполняется на основе определения автокорреляционных зависимостей каждого сигнала сканирования полученных автокорреляционных функций соответствующих сигналов (автокорреляционные функции сравнивают попарно, т. е. автокорреляционную функцию электрического сигнал.а, соответствующую правому растру на левом снимке стереопары 1щ, сранивают с автокорреляционной функцией электрического сигнала,, соответствующего правому растру сканирования на нравом снимке стереопары Ijn ; автокорреляционную функцию электрического сигнала, соответствующего левому растру на левом снимке стереопары (|д сравнивают с автокорреляционной функцией электрического сигнала, соответствующего левому растру сканирования на правом снимке ). На.хождение участков снимков с максимальным подобием выполняется как перемещением растров сканирования по снимку, так и изменением размеров растра. Под операцией «сравнение подразумевается один из известных способов обнаружения, опознания и отождествления изображений: среднеквадратичный (Зигерта-Котельникова), фильтровый, корреляционный. После отождествления идентичных участков,-считанны-х правыми растрами (Ij.,1гп) и отождествления идентичных участков, считанныхлевыми растрами (|д, 1,), можно определить идентичные точки на левом и правом снимках стереопары. Ими будут точки пересечения отождествленных областей, т. е. обпдие точки областей, отождествленных левыми и правыми растрами, точки ОА и On. Изменяя положение общей точки правого и левого растра и независимо меняя размеры правого и левого растра на одном из снимков стереопары, добиваются максимального соответствия сравниваемых автокорреляционных функций, что соответствует наведению общих точек правого и левого растра на каждом снимке стереопары на идентичные точки. После этого определяют параллактические смещения идентичных точек н.а снимках стереопары, которые используются для рисовки рельефа. Аналогично происходит отождествление последующих точек. Изобретение позволяет учитывать различные в масштабах как областей отождествления в целом, так и изменение масщтаба изображения в пределах строки сканирования. Использование автокорреляционных функций видеосигналов позволяет учитывать статистические связи между элементами изображений и уменьшить объем информации, которую необходимо обрабатывать в процессе отождествления.
Формула изобретения
Способ автоматической рисовки рельефа по стереопаре снимков, заключающийся в сканировании и преобразовании и электрические сигналы изображений снимков стереопары и определении параллаксов идентичных точек по электрическим сигналам, отличающийся тем, что, с целью повышения точности и надежности автоматической рисовки рельефа, изображение каждого из снимков стереопары сканируют вдоль одной линии одновременно двумя световыми лучами, движуншмися в противофазе с одинаковой частотой и независимым изменением размера растра, имеющими только одну бщую
точку сканирования, преобразовывают в электрические сигналы отдельно для каждого луча сканирования, затем определяют автокорреляционные функции электрических сигналов, соответствующих каждому отдельному лучу сканирования, сравнивают автокорреляционные функции, соответствующие только левым растрам сканирования на снимках стереопары и, одновременно, соотвествующие только правым растрам сканирования, и онределяют точное положение идентичных точек стереопары путем нахождения общих точек областей, отождествленных левыми и правыми растрами сканирования.
Источники информации, принятые во внимание при экспертизе
1.Photogrammetric End. and Remote Sengsing, i975, 41, 3, с. 325-330.
2.Патент США № 3432674, кл. 250220, 1970 (прототип).