I
Изобретение относится к области автоматики и может быть использовано при исследовании, настройке и экспериментальном определении динамических характеристик следящих приводов.
Наиболее близким по технической сущности к данному изобретению является задающее устройство, содержащее генератор импульсов, первый выход которого через формирователь сигнала ускорения подключен к первому входу блока управления скоростью, блок управления углом поворота, первый вход которого через запоминающий блок соединен с выходом блока управления скоростью, а выход - со входом реверсивного счетчика угла поворота 1.
Недостатком такого устройства является малая точность.
Цель изобретения - повыщение точности устройства.
Это достигается тем, что в предлагаемое задающее устройство для цифрового следящего привода введен анализатор, вход которого соединен со вторым выходом генератора импульсов, а первый и второй выходы соединены соответственно со вторыми
входами блоков управления скоростью и углом поворота.
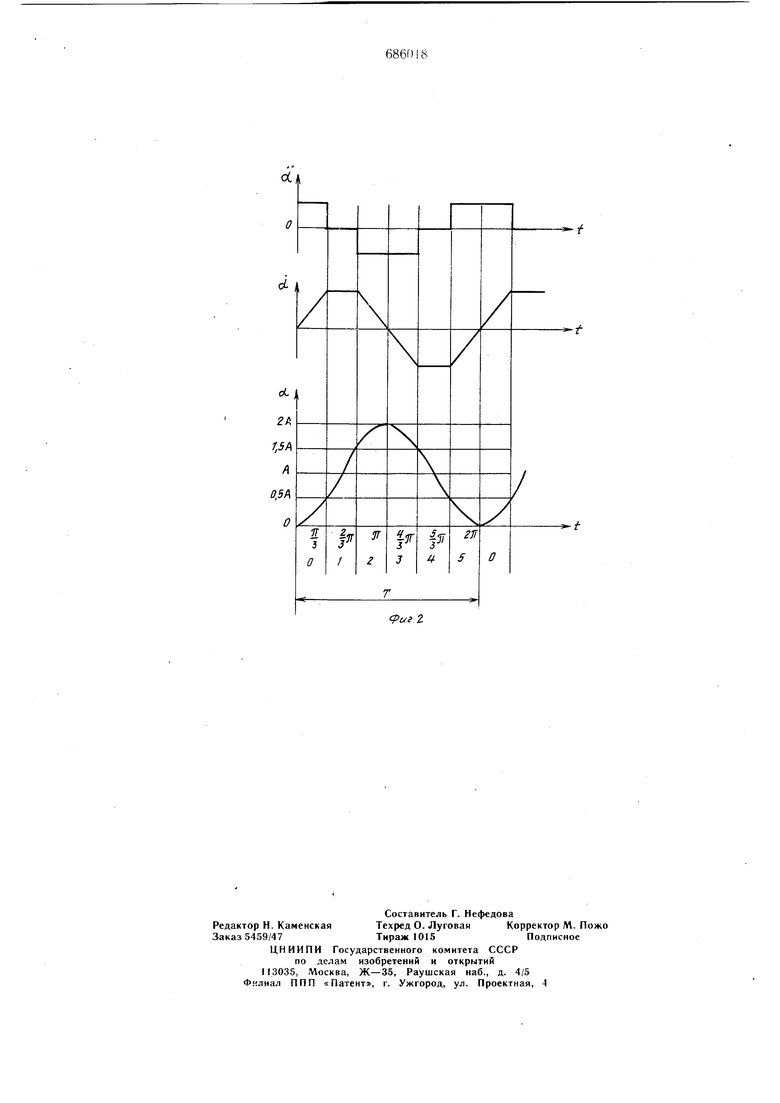
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - диаграммы работы устройства, где показаны генератор импульсов 1, формирователь сигналов 2, блок управления скоростью 3, запоминающий блок 4, блок управления углом 5, реверсивный счетчик угла 6, анализатор 7, период воздействия Т, амплитуда угла разворота А, угловая скорость а и угловое ускорениеа.
Задающее устройство работает следующим образом.
Устройство реализует гармонический сигнал, составленный из кусков функций У КХ и У КХ. Параметры движения управляемого объекта, например следящего электропривода (на чертеже не показан), под воздействием гармонического сигнала связаны соотнощениями
Г 2я4- 2л., где Т - период воздействия (с);
А - амплитуда угла разворота (град); а - максимальная угловая скорость (град/с); а - максимальное угловое ускорение (град/с--). /1ля полной определенности формируемой функции в данном устройстве исходными являются ;1ва параметра: период функции Т и ускорение ц . Поскольку в данном задающем устройстве гармонический сигнал составлен нз кусково-линейной и параболической функции, для реализации данного способа представления сигнала период воздействия разбит на шесть равных зон (фиг. 2), в каждой из которых изменение функции происходит по определенному закону. В зонах 1, 4 изме 1ение функции происходит по линейному закону, а в зонах О, 2,3,5 - по параболическому. Управляющие сигналы, соответствующие зоне, вырабатываются в анализаторе зон периода гармонического воздействия 7. Вторым задаваемым параметром в устройстве является ускорение, значение которого вырабатывается в формирователе ускорения 2. Функции скорости а и угла а формируются путем последовательного интегрирования ускорения в реальном масштабе вре.мени. Частота, пропорциональная ускорению ft, поступает на один вход блока управления скоростью 3, на второй вход которого .поступают управляющие сигналы из анализатора зон периода гармонического воздействия 7. С выхода блока управления скоростью 3 частота, про1Ю)циональная ускорению It , поступает на вход запоминающего блока 4 в зонах О, 2, 3, 5, причем в зонах О и 5 разрещается возрастание кода, а в зонах 2 и 3 уменьшение кода, т. е. счет в минус. С выхода накргжтеля скорости 4 частота, пропорциональная коду скорости Та, поступает на один вход блока управления углом 5, на FSTOjn-.K вход которого из анализатора зон 1 е :11ода гармо1;ического воздействия 7 поступают управляющие сигнг лы. С выхода блока управления углом 5 частота, пропорциоги:ьная коду скорости а, поступает в реверс1; шый счетчик угла б, где счет в плюс paspenien в зонах -О, 1, 2, счет в минус - в зонах 3, 4, 5. Ка выходе реверсивного счетчика угла б формируется гармоническое синусоидальное воздействие, максимальная погрешность которого на параболических участках достигает 1,2%, а на линей.чих - 0,9%. Формула изобретения Задающее устройство для цифрового следящего привода, содержащее генератор импульсов, первый выход которого через формирователь сигнала ускорения подключен к первому входу блока управления скоростью. блок управления углом поворота, первый вход которого через запоминающий блок соединен с выходом блока управления скоростью, а выход - со входом реверсивного счетчика угла поворота, отличающееся те.м, что, с целью повышения точности устройства, оно содержит анализатор, вход которого соединен со вторым выходом генератора импульсов, а первый и второй выходы соединены соответственно со вторыми входами блоков управления скоростью и углом по ворота. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 561169, кл. G 05 В 19/ 18, от 25.08.75 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Задающее устройство для цифрового следящего привода | 1983 |
|
SU1191885A1 |
| Задающее устройство для цифрового следящего привода | 1983 |
|
SU1144088A1 |
| Способ определения частотной характеристики испытуемого объекта и устройство для его осуществления | 1984 |
|
SU1223074A1 |
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Задающее устройство для цифрового следящего привода | 1975 |
|
SU561169A2 |
| Программируемый преобразователь напряжения произвольной формы в напряжение требуемой формы | 1990 |
|
SU1711303A1 |
| Вибрационный источник сейсмических сигналов | 1986 |
|
SU1405001A1 |
| Сейсмический вибратор | 1985 |
|
SU1277036A1 |
| Устройство для программного управления | 1987 |
|
SU1427333A1 |
Z
5
I
ZJ
iir
