Изобретение относится к элементам систем с цифровым программным управлением и предназначено для использования при исследовании, настройке и экспериментальном определении динамических характеристик следящих приводовj а также совместно с устройствами программного управления антеннами и радиотелескопами для автоматического поиска объекта при его отклонении от программной траектории. Известно задающее устройство для следящего привода, содержащее управляемый генератор синусоидальных напряжений, цйфроуправляемые сопротивления, усилители мощности и реверсивный счетчик, причем выходы генератора синусоидальны напряжений соединены через цйфроуправляемые сопротивления с входами усилителей мощности, выходы которых являются выходами устройства, а выход реверсивного счетчика подключен к входам управления цифроуправляемых сопротивлений. Устройство формирует аналоговьгй сигнал, осуществляющий спиральную развертку O Однако данное устройство требует слолсной регулировки из-за присутствия аналоговых элементов и обладает низкой точностью, что ограничивает его использование в цифровых следящих приводах. Кроме того, в них не достигается постоянство линейной скорости на различных витках спирали при постоянстве шага между виткашг, что ограничивает их приме ненне в устройствах поиска объекта при управлении цифровыми следящими приводами антенных устройств и радиотелескопов. Наиболее близким по технической сущности к изобретению является задающее устройство для цифрового следящего привода, содержащее гене ратор импульсов, формирователь импульсов, блок управления скоростью запоминающий блок, блок коммутации реверсивный счетчик и анализатор, формирующий управляющие сигналы, причем генератор импульсов через формирователь импульсов подключен к первому входу блока управления скоростью, выход KOTOJJoro через за поминающий блок соединен с первым входом блока коммутации, выход кот рого соединен с входом реверсивног 882 счетчика, при этом генератор импульсов соединен с входом анализатора, выходы которого соединены с вторыми входами блоков управления скоростью и блока коммутации 2j . Известное устройство не обеспечивает формирование гармонического сигнала с линейно возрастающей амплитудой, что ограничивает возможности устройства при испытании следящих приводов. Кроме того, при его использовании в двухкоординатных системах в режиме поиска объекта может быть получена только круговая развертка, в отличие от спи ральной, наиболее эффективной для этой цели. . Цель изобретения - расширение функциональных возможностей.. Указанная цель достигается тем, что в задающее устройство для цифрового следящего привода, содержащее генератор импульсов, выход которого соединен с входом формирователя импульсОв, последовательно соединенные первые блок коммутации и реверсивный счетчик, последовательно соединенные вторые блок коммутации и реверсивный счетчик, а.также фор- мирователь управляющих сигналов, первый выход которого подключен к первым входам блоков коммутации, причем выходы реверсивных счетчиков соединены с соответствующими выходами задающего устройства, введены триггер, задатчик начальных усЛоВИЙ и последовательносоединенные арифметико-логический блок и цифровой элемент задержки, выход которого подключен к первому входу формирователя управляющих сигналов, а второй вход - к выходу генератора импульсов, причем выход формирователя импульсов.соединен с вторыми входами первого и второго блоков коммутации, первый и второй выходы задатчика начальных условий - соответственно с вторьм входом первого реверсивного счетчика и с третьим входом цифрового элемента задержки, выходы первого и второго реверсивного счетчиков - соответственно с первым и вторым, входами арифметико-логического блока, подключенного третьим входом к второму выходу формирователя управляющих сигналов, первый вход задающего устройства соединен с первым
31
входом триггера, подключенного выходом к второму входу формирователя импульсов, и с третьим входом первого реверсивного счетчика, вто рой вход задающего устройства - с вторым входом триггера, а третий вход задающего устройства - с чет;вертым входом первого реверсивного счетчика и с вторыми входами второго реверсивного счетчика и формирователя управляющих сигналов.
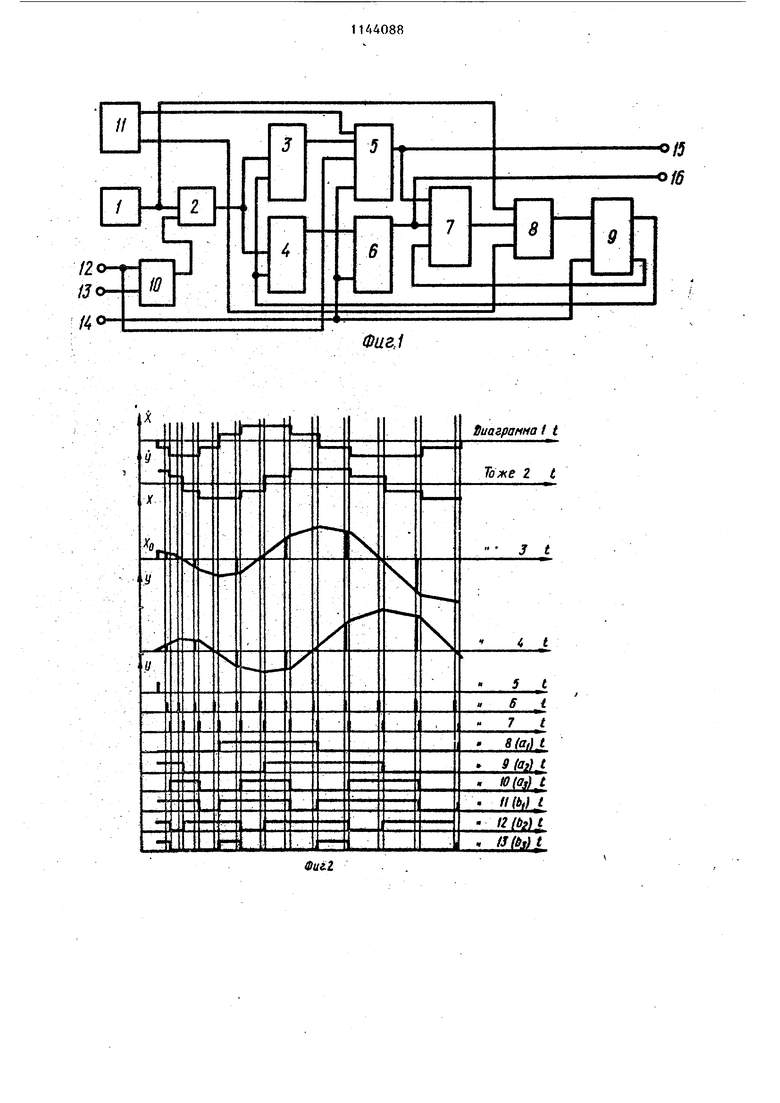
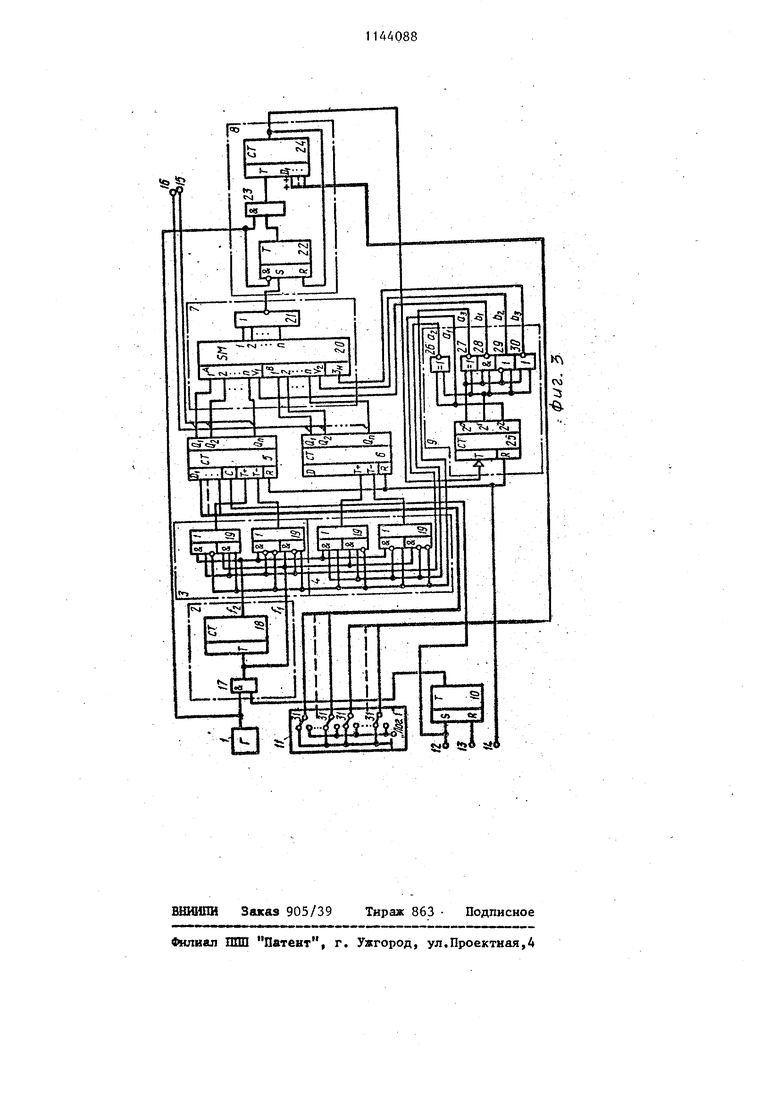
На фиг. 1 представлена структурная схема устройства} на фиг. 2 временйые диаграммы сигналов на выхода:х функциональных элементов; на фиг, 3 - функциональная схема примерной реализации задающего устройства для двухкоординатного следящего привода с восьмиугольной спираЛьной траекторией перемещения. Устройство содержит генератор 1 импульсов, формирователь 2 импульсов, первый 3 и второй 4 блоки комму :тации, первый,5 и второй 6 реверсивные счетчики, арифметико-логический блок 7, цифровой элемент 8 задержки, формирователь 9 управляющих сигналов, триггер 10, задатчик 11 начальных условий, первый 12, второй 13 и третий 14 входы задающего устройст ва, выходы 15 и 16 задающего устройства, элемент И 17, первый дели-тель 18 частоты, элементы 2 .И-ИЛИ 19 сумматор-вычитатель 20, элемент ИЛИНЕ 21, второй триггер 22, элемент И 23, второй делитель 24 частоты, счетчик 25 импульсов, логические элементы 2i6-30, переключатели 31.
Задающее устройство (Фиг 3) рабо тает следующим образом.
440884
После подачи питания устройство устанавливается в исходное состояние сигналом Сброс, поступающим по третьему входу 14 устройства. J В исходном состоянии триггер 10, реверсивные счетчики 5 и 6 и счетчик 25 импульсов формирователя 9 управляющих сигналов находятся в нулевом состоянии. Нулевой сигйал
10 с триггера ТО запрещает прохожпение через элемент И 17 импульсов с генератора 1 импульсов на делитель 18 частоты формирователя 2 импульсов. При поступлении сигнала Пуск
5 по первому входу 12 устройства триггера 10 устанавливается в единичное состояние, и одновременно в реверсивный счетчик 5 по вхоДу D (второй вход) записьюается начальная
0 координата г, , формируемая задатчиком 11 начальных условий. Начальная координата Ttg может быть выбрана любой, но не менее, чем li
где Д - цена одного импульса в единицах измерения координат; t- длительность цифровой задержки, Т период следования импульсов с генератора 1 импульсов.
Единичный сигнал с выхода триггера 10 разрешает работу формирова- теля 2 импульсрв, который формирует на выходе импульсные сигналы с частотами f и fg 0,41f,. I
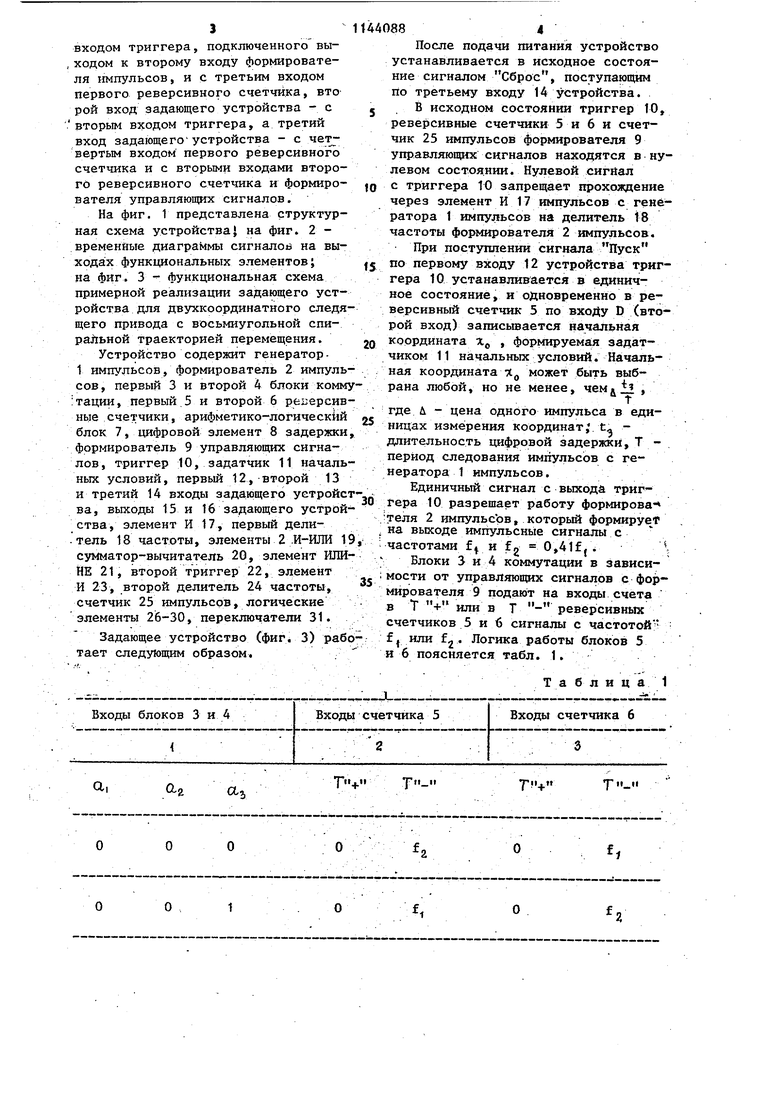
Блоки 3 и 4 коммутации в зависимости от управляющих сигналов с формирователя 9 подают на входы счета
в Т +
ll t«или в
реверсивных
счетчиков 5 и 6 сигналы с частотой fJ или f2. Логика работы блоков 5 и 6 поясняется табл. 1.
Т а б л и ц а 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Задающее устройство для цифрового следящего привода | 1986 |
|
SU1411709A1 |
| Задающее устройство для цифрового следящего привода | 1985 |
|
SU1325412A1 |
| Цифровая следящая система | 1978 |
|
SU744439A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Цифровой фазометр | 1983 |
|
SU1128187A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |
| Система программного управления электроприводом | 1987 |
|
SU1481708A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Устройство для управления инвертором тока | 1988 |
|
SU1656646A1 |
| ОБНАРУЖИТЕЛЬ ПАЧКИ СИГНАЛОВ | 2006 |
|
RU2308046C1 |
ЗАДАЮЩЕЕ УСТРОЙСТВО ДЛЯ ЦИФРОВОГО СЛЕДЯЩЕГО ПРИВОДА, содержащее генератор импульсов, выход которого соединен с входом формирователя импульсов, последовательно соединенные первые блок коммутации и реверсивный счетчик, последовательно соединенные вторые блок коммутации и реверсивный счетчик, а также формирователь управляющих сигналов, первый выход которого подключен к первым входам блоков коммуг тации, причем выходы реверсивных счетчиков соединены с соответствующими выходами задающего устройства, отличающееся , тем, что, с целью расширения функциональных возможностей, в устройство введены триггер, задатчик начальных условий и последовательно соединенные арифметико-логический блок и цифровой элемент задержки, выход которого подключен к первому входу формирователя управляющих сигналов, а второй вход - к выходу генератора импульсов, причем выход формирователя импульсов соединен с вторыми входами первого и второго блоков коммутации, первый и второй выходы задатчика начальных условий - соответственно с вторым входом первого реверсивного счетчика и с третьим входом цифрового элемента задержки, выходы первого и (Л второго реверсивного счетчиков соответственно с первым и вторым С входами арифметико-логического блока , подключенного третьим входом S к второму выходу формирователя управляющих сигналов, первый вход задающего устройства соединен с первым входом триггера, подключенного вькодом к второму входу формирова4 4 теля импульсов, и с третьим входом первого реверсивного счетчика, вто-/ рой вход задающего устройства - с О 00 00 вторым входом триггера, а третий вход задающего устройства - с четвертым входом первого реверсивного :счетчика и с вторыми входами второго реверсивного счетчика и формирова теля управляющих сигналов.
ТЧ
а,
О-с
Ctj
f
1-Г- ГГ
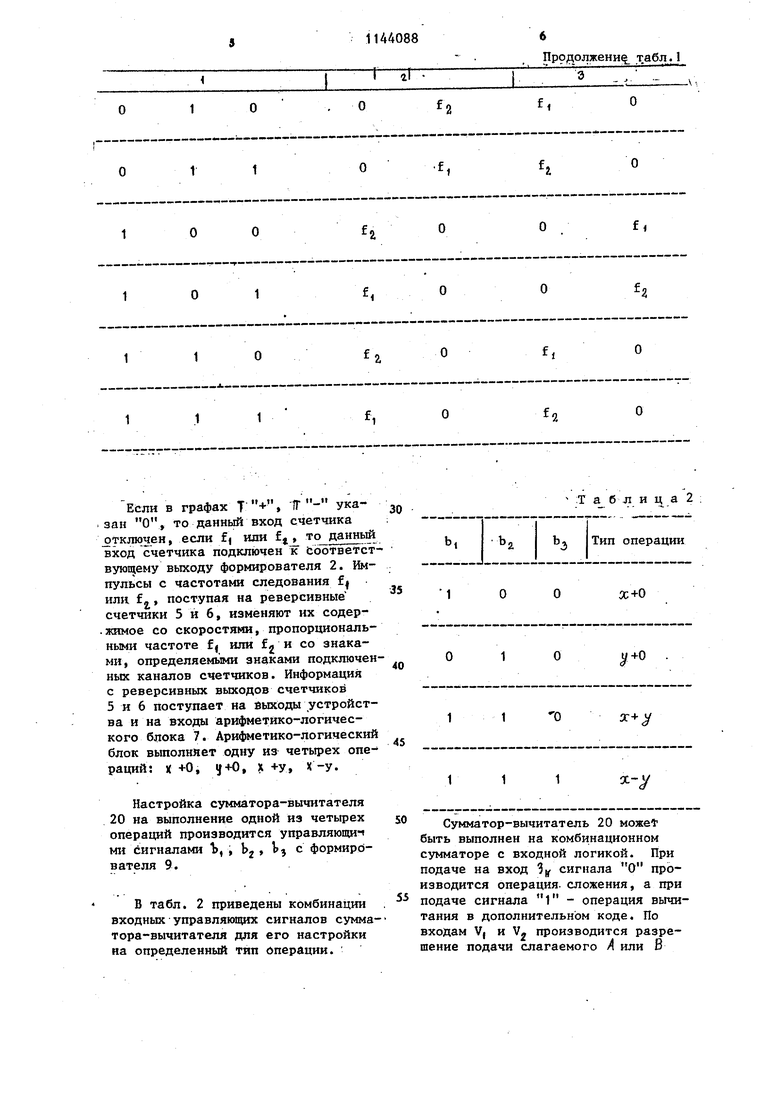
-|Г - укаЕсли в графах Т
зан О, то данный вход счетчика тключен, если f или fj то данный вход счетчика подключен к Ьоответствующему выходу формирователя 2. Импульсы с частотами следования f| или f „ ,
поступая на реверсивные
счетчики 5 и 6, изменяют их содержимое со скоростями, пропорциональными частоте f| или f и со знаками, определяемьтми знаками подключенных каналов счетчиков. Информация с реверсивных выходов счетчиков 5 и 6 Поступает на выходы устройства и на входы арифметико-логического блока 7. Арифметико-логический блок выполняет одну из четьфех операций: х +0, (f-fO, X +у, X -у.
Настройка сумматора-вычитателя 20 на выполнение одной из четьфех операций производится управляющие ми сигналами Ъ,, Ц, Vj с формирователя 9.
В табл. 2 приведены комбинации входных управляющих сигналов сумма-тора-вычитателя для его настройки на определенный тип Операции.
Продолжение табл.1
Э
:Т а б Л И ц а 2
Х+0
+0
Х+
х-у
Сумматор-вычитатепь 20 може быть выполнен на комбинационном сумматоре с входной логикой. При подаче на вход 3| сигнала О про изводится операция, сложения, а при подаче сигнала 1 - операция вычитания в дополнительном коде. По входам V| и V производится разрешение подачи слагаемого А или В
на сзгмматор-вычитатель. Единичный сигнал с выхода элемента ИЛИ-НЕ 2Т, который появляется при нулевом результате на выходе сумматоравычитателя 20, поступает на вход цифрового элемента 8 задержки.
Триггер 22 служит для запоминания входного сигнала, при этом входной сигнал при записи в триггер 22 стро бируется инверсией тактового сигнала, поступающего с генератора 1, с целью исключения ложных срабатываний во время переходных процессов в счетчиках 5 и 6 и арифметико-логическом блоке 7. Делитель 24 частоты имеет переменный коэффициент деления и может быть
О
1
1
Внешние сигналы Пуск, Останов и Сброс, поступающие на первый.
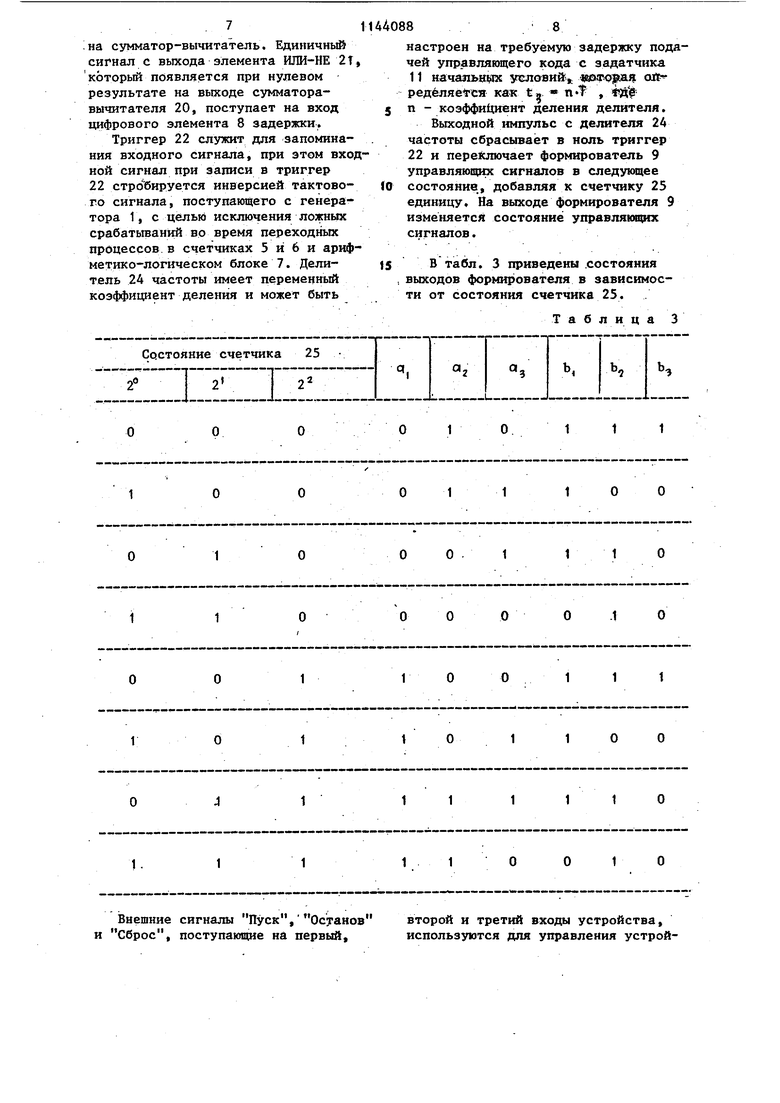
настроен на требуемую задержку подачей управляющего кода с задатчика 11 начальных , сш редёляется ка« t « п «Т , п - коэффициент деления делителя. Выходной импульс с делителя 24 частоты сбрасывает в ноль триггер 22 и переключает формирователь 9 управляющих сигналов в следующее состояние, добавляя к счетчику 25 единицу. На выходе формирователя 9 изменяется состояние управляющих сигналов.
В табл. 3 приведены .состояния выходов формирователя в зависимости от состояния счетчика 25.
Т а б л и ц а 3
О О . 1
1 1 О
О
О О
О
1 1 1
1 О
1 о о
1 1
1 1 о
11
второй и третий входы устройства, используются для управления устрой9 ,
ством. При поступлении сигнала Останов запрещается изменение содержимого счетчиков, т.е. происходит запоминание сформированных координат. При поступлении сигнала Сброс производится установка устройства в исходное состояние. При этом значения координат в счетчиках 5 и 6 обнуляются и счетчик 25 формирователя 9 устанавливается в исходное состояние,
С помощью сигналов Пуск, Останов и Сброс можно реализовать различные режимы работы устройства в зависимости от его назначения. Например, при использовании его для поиска объекта совместно с системой программного управления, сигнал Останов может формироваться при появлении полезного сигнала на внешних приемных устройствах. При этом значения координат X .у , зафиксирванные на момент останова, вводятся как поправки в систему программного управления. В том случае, когда задан определенный сектор поиска, при достижении координаты х или ij заданного значения, которое может фиксироваться сравнивающим устройством, внешнее устройство управления вьщает сигналы Сброс и Пуск При этом осуществляется Многократный поиск объекта в заданном секторе..
На фиг. 2 даны временные диаграммы, поясняющие процессы формирования скорости.изменения координат (диаграммы 1 и 2), формирования коодинат (диаграммы 3 и 4), и управляющих сигналов на вь1ходе арифметико-логического блока 7 (диаграмма 6) и элемент, 8 задержки (диаграмма 7). На диаграмме 5 указан сигнал Пуск , а на диаграммах 8-13 сигналы на выходах а., , а а Ь, , bj и )з формирователя 9.
Абсолютное значение скоростей изменения координат, пропорциональное частоте f( или fо определяется сигналом а , а знак скорости для координаты ж - сигналом а,, для координаты If - сигналом а 2 . Счетчики 5 и 6 выполняют роль интеграто44088 , 10
ров. функция изменения координаты 3c(t) представляет аппроксимацию линейными отрезками косинусоиды, а у (t) - синусоиды с линейно возрастающими во времени амплитудой и перир/т;ом. На диаграмме. 5 представлен сигнал Пуск, при котором в счетчик координаты ДС заносится начальное значение координаты ifg . Сигнал
0 на диаграмме 6 появляется при переходе координат X и ij через ноль, либо при равенстве их абсолютных значенийj а сигнал на диаграмме 7 повторяет сигнал на диаграмме б
5 с задержкой на t. Увеличение периода и амплитуды достигается за счет введения задержки, которая .дает запаздывание для переключения формирователя 9. При этом после
0 появления сигнала на выходе арифметико-логического блока 7 изменение координат происходит некоторое время по прежним условиям,.благодаря чему происходит увеличение размаха амплитуды и увеличение периода :
Таким образом, в предлагаемом задающем устройстве появляются но вые функциональные возможности устройства: формирование цифрового гармонического сигналас линейно возрастающей, амплитудой и формирование при двухкоординатном следящем приво;де спиральной развертки с постоянной линейной скоростью и постоянным шагом между витками.
Предлагаемое устройство имеет более широкую область применения., в частности для испытания приводов, когда требуется исследование динамич;еских характеристик при изменяющихся амплитудах гармонического задающего, сигнала и также для построения
устройств поиска. Устройство относительно просто реализуется с использованием микросхем средней степени интеграции, при этом возможна реализация как с пара шельным представлением информации, так и с последовательным представлением информации .
и /J
/40
Фаг,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Формирователь напряжения спиральной развертки | 1975 |
|
SU527837A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Задающее устройство для цифрового следящего привода | 1978 |
|
SU686018A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
