Изобретение относится к автоматике и может использоваться для управления следящими электроприй одами ра- диотелескопов при программном сопровождении низколетящих космических объектов (КО).
Цель изобретения - повышение точности управления путем снижения методических ошибок интерполирования.
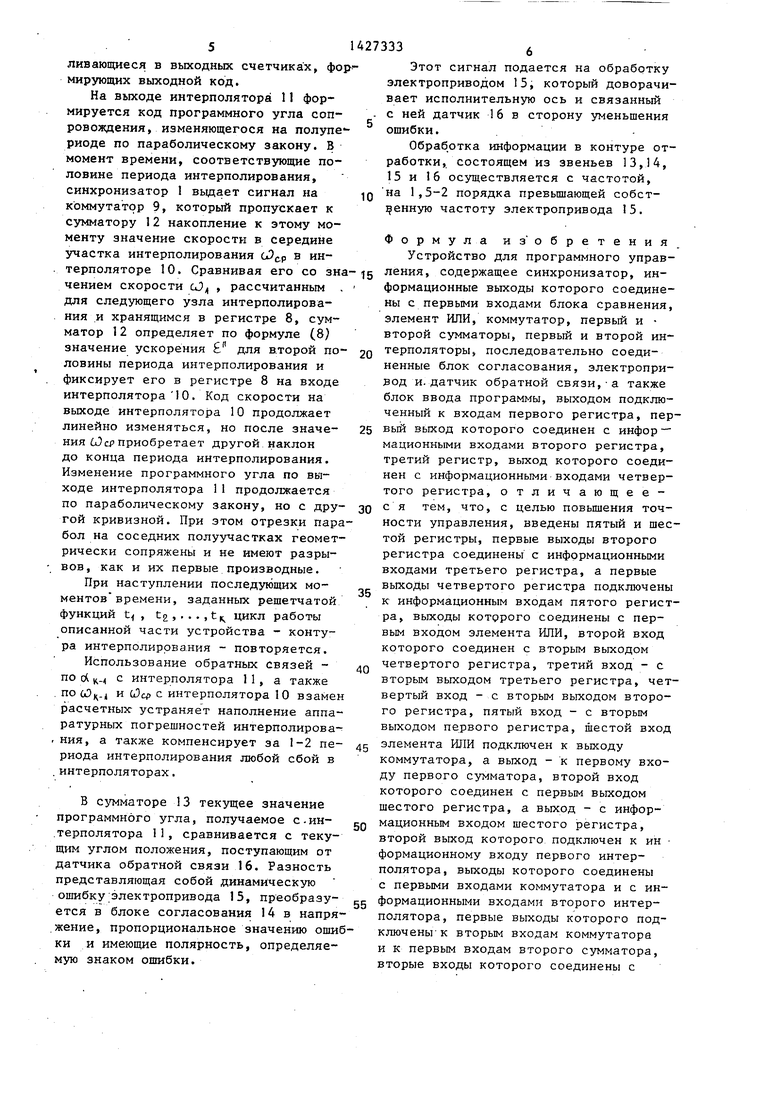
На фиг.1 дана структурная схема устройства для программного управления; на фиг.2 - временные диаграммы.
Устройство содержит синхронизатор 1, блок 2 ввода программы, первый - шестой регистры 3-8 соответственно коммутатор 9, первый интерполятор 10 второй интерполятор 11, первый 12 и второй 13 сумматора, - блок согласования 14, электропривод 15, цифровой датчик 16 обратной связи, элемент Или 17 и блок сравнения 18.
Устройство реализует способ нелинейного интерполирования и устраняет в отличие от других известных способов и устройств, разрывы в первой производной интерполированной функции угла, т.е. в функции скорости. Это достигается введением дополнительной, расчетной опорной точки в середине каждого участка интерполиро вания, изломом функции скорости в этой точке. Параметры излома выбираются на каждом участке такими, чтобы при уравнивании скоростей на границах соседних участков функция угла совпадала бы в узлах интерполирования с заданной решетчатой функцией
Алгоритм интерполирования получен из разностной интерполяционной формулы Бееселя:
B(x)f..UAf. .
2
+ У у:1Ку:д 51.з +и1у1-р У;2)
(l f:JLiu fcil
+.
y yi0i51iybniiily ilsiililiyih)
(2h + 1)
,
().
где f-n значение решетчатой функции в момент времени t. ;
d f-K конечная разность порядка г, определяемая как
. Д - f-K (2)
Параметр U изменяется в пределах О 6 и 1 на участке интерполирования. В дальнейшем, для кратности будем обозначать
.,
(3)
В качестве первичной информации устройство используют решетчатую функцию угла по времени tvc. Ограничиваясь пятью членами формулы (1), с учетом обозначения (3), получим интерполяционную функцию для текущего угла о((. :
.ил...
.(У1Шр.5)дЬ
Uj()) 41 Г /
(4)
где о(о - начальный угол.
Дифференцируя (4) и определяя значения скорости на границах соседних зтастков, полагая для предьщу- щего и и О для последующего участков, определяет величину разрьюа функции скорости в узле интерполирования, среднее значение скорости, необходимое для устранения разрьша, а также такое значение скорости на середине участка интерполирования, при котором линейное изменение скорости на полуучастках беспечит получение текущего угла в. узлах интер- полирования, равного заданному в решетчатой функции. Таким образом определено, что в момент времени t./i, когда состояние устройства задается
параметрами о( к- и следует вычислять: конечные разности до 5-го порядка, пользуясь формулой ( 2,) и 6-ю значениями решетчатой функции; значение скорости для момента времени t« по формуле
Акн+Ак о Г
4K-.t 32
Дк-2
32
значение скорости в середине участка tK- , tn j в точке ее излома, по формуле
JlllA
GJcP tK-4 ,t 2Лк-л(6)
значение ускорения на первой половине участка интерполирования
с
t IjJcp- ljJ KК-1
В момент времени, соответствующий середине участка .i , t , следует вычислить значения ускорения на второй половине участка интерполи- рования
aЗк - cJcp
Устройство работает следующим образом.
До начала сеанса сопровождения, в произвольные моменты времени, синхронизатор 1 вьщает 5 групп сигналов дл загрузки последовательно соединенных регистров 3-7 пятью значениями решетчатой функции угла из блока ввода программы 2, Синхронизатор 1 состоит из генератора тактовых импульсов, сдвиговых регистров и счетчиков времени на делителях, для формирования последовательностей синхросигналов и временных интервалов. Синхронизатор работает в режиме электронных часов, при этом движение начинается при .равенстве кодов времени на счетчиках синхронизатора и на вькоде блока 2 по сигналу равенства кодов времени с вьпсода блока 18.Кроме того, синхронизатор получает из блока 2 значение периода интерполирования Т, а значение начального угла сопровождения он передает в интерполятор 11 для фиксации на его выходе, что вызывает переброску электропривода на начальный угол работы.
Когда отсчет времени в синхронизаторе 1 достигает значения начала сеанса, по сигналу блока сравнени 18 он выдает сигналы на считывание очередной точки из блока ввода программы 2 и на сдвиг информации в регистрах 3-7. При этом в каждом регистре номер хранимого узла решетчатой функ
20
ции угла увеличится на единицу, а прежние значения будут выданы через элемент ИЛИ 17 к сумматору 12, который рассчитывает все требуемые конечные разности, скорость cJ для узла ti по формуле 3(5), скорость tO., в , середине участка to, по формуле (6) и ускорение . по формуле
10 (7) Регистр 8 используется при рас- четах как аккумулятор для хранения
промежуточных результатов, в нем также фиксируются конечные результаты в виде 6J и .
15 При расчетах и для первого участка, я также при расчетах а, требуемое по формуле (5) значение СЭц-ч принимается сумматором 12 из интерполятора 10. Значение о(о (о( последующих участках) принимается при расчетах с выхода интерполятора 11 через коммутатор 9, открьтаемый сигналом синхронизатора 1. Ускорение В фиксируется регистром 8 на входе линей25 ного интерполятора 10 на вермя, равное половине периода интерполирования. Интерполятор 10 работает под управлением синхронизатора 1 и формирует на выходе код текущей скорос30 ти сопровождения, линейно изменяющейся в течение полупериода интерполирования от (jO,H до fjj(t(.-;f,
и поступающий на вход второго линейного интерполятора II, также работающего под управлением синхронизатора 1 .
Последовательное суммирование кодов через элемент 17 на одних входах сумматора 12 и регистр 8 на других входах позволяет накапливать в регистре 8 все промежуточные значения , расчетов, до получения окончательных значений, используемых в интерполяторе 10.
Интерполяторы 10 и II служат для равномерного изменения выходного кода во времени таким образом, что к концу заданного периода интерполяции на выходе нарабатьшается код, cQ- равный входному, т.е. интерполятор эквивалентен цифровому интегратору.
С синхронизатора 1 на интерполя- торы 10 и 11 поступают опорные частоты, обратно пропорциональные периоду интерполяции, которые умножаются на входные коды и формируют интерполяционные частоты (.т.е. производится преобразование код-частота), накап35
40
4Б
ливающиеся в выходных счетчиках, фор мирующих выходной код.
На выходе интерполятора 11 формируется код программного угла сопровождения, изменяющегося на полупе риоде по параболическому закону. В момент времени, соответствующие половине периода интерполирования, синхронизатор 1 выдает сигнал на коммутатор 9, который пропускает к сумматору 12 накопление к этому моменту значение скорости в середине участка интерполирования cJc.p ин
Этот сигнал подается на обработку электроприводом 15, который доворачи- вает исполнительную ось и связанный с ней датчик 16 в сторону уменьшения ошибки.
Обраб.отка информации в контуре отработки, состоящем из звеньев 13,14, 15 и 16 осуществляется с частотой, на 1,5-2 порядка превьш1ающей собст- i eHHyro частоту электропривода 15.
Формула из обретения Устройство для программного управ
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2028665C1 |
| Устройство для программного управления | 1982 |
|
SU1108392A1 |
| Частотный преобразователь | 1980 |
|
SU884131A1 |
| Линейный интерполятор | 1989 |
|
SU1686408A1 |
| МНОГОКАНАЛЬНЫЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1973 |
|
SU384115A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1317398A1 |
| Многоканальный интерполятор функций | 1986 |
|
SU1361588A1 |
| Интерполятор третьей степени | 1988 |
|
SU1566369A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Интерполятор | 1986 |
|
SU1401481A1 |

Изобретение относится к автоматике и может использоваться для управления следящими электропривода.ми радиотелескопов при программном сопровождении низколетящих космических объектов. Целью изобретения является повышение точности управления путем снижения методических.ошибок интерполирования. При этом за счет увеличения плавности управления уменьшаются ошибки слежения электроприводов наведения и снижаются динамические нагрузки на высокоточные механизмы, например, радиотелескопа. Устройство содержит синхронизатор 1, блок 2 ввода программы регистры 3-8, коммутатор 9,интерполяторы 10,11 .сумматоры 12, 13, блок согласования 14, электропривод 15, датчик 16 обратной связи, элемент ИЛИ 17 и блок сравнения 18. Устройство реализует способ нелинейного интерполирования и устраняет, в отличие от других известных устройств, разрьшы в первой производной интерполированной функции угла, т.е. в функции скорости. Это достигается введением дополнительной, расчетной опорной точки в середине каждого участка интерполирования, изломом функции скорости в этой точке. Параметры излома выбираются на каждом участке такими, чтобы при уравнивании скоростей на границах соседних участков функция угла совпадала бы в узлах интерполирования с заданной решетчатой функ- цией. 2 ил. (О (Л 4 ю СлЭ СО СО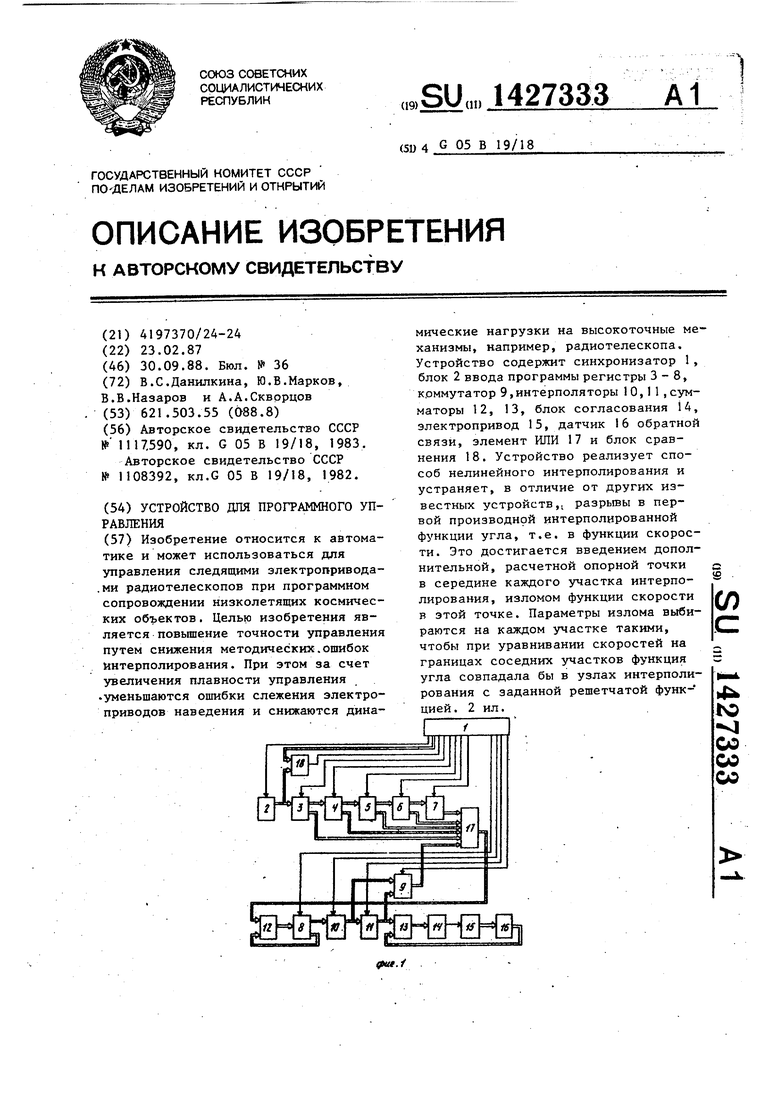
20
25
терполяторе 10. Сравнивая его со ления, содержащее синхронизатор, ин- чением скорости cj , рассчитанным , для следующего узла интерполирования и хранящимся в регистре 8, сумматор 12 определяет по формуле (8) значение ускорения для в.торой половины периода интерполирования и фиксирует его в регистре 8 на входе интерполятора 10. Код скорости на выходе интерполятора 10 продолжает линейно изменяться, но после значения {Jcp приобретает другой наклон до конца периода интерполирования. Изменение программного угла по выходе интерполятора 11 продолжается по параболическому закону, но с другой кривизной. При этом отрезки парабол на соседних полуучастках геометрически сопряжены и не имеют разрывов, как и их первые производные.
При наступлении последующих моментов времени, заданных решетчатой функций t , tj , , . . , t, цикл работы описанной части устройства - контура интерполирования - повторяется.
Использование обратных связей - по с к.- с интерполятора 11, а также . по 05. и (Dcp с интерполятора 10 взамен расчетных устраняет наполнение аппаратурных погрешностей интерполирова30
35
формационные выходы которого соединены с первыми входами блока сравнения, элемент ИЛИ, коммутатор, первый и второй сумматоры, первый и второй интерполяторы, последовательно соединенные блок согласования, электропривод и. датчик обратной связи,-а также блок ввода программы, выходом подключенный к входам первого регистра, пер вый выход которого соединен с инфор- мационными входами второго регистра, третий регистр, выход которого соединен с информационными входами четвертого регистра, отличающееся тем, что, с целью повьш1ения точности управления, введены пятый и шес той регистры, первые выходы второго регистра соединены с информационными входами третьего регистра, а первые выходы четвертого регистра подключены к информационным входам пятого регист ра, выходы которого соединены с первым входом элемента ИЛИ, второй вход которого соединен с вторым выходом четвертого регистра, третий вход - с вторым выходом третьего регистра, чет вертый вход - с вторым выходом второго регистра, пятый вход - с вторым выходом первого регистра, шестой вход
40
. ния, а также компенсирует за 1-2 периода интерполирования любой сбой в .интерполяторах.
В с т маторе 13 текущее значение программного угла, получаемое с-ин- .терполятора 11, сравнивается с текущим углом положения, поступающим от датчика обратной связи 16. Разность представляющая собой динамическую ошибку электропривода 15, преобразуется в блоке согласования 14 в напря- ,жение, пропорциональное значению ошибки и имеющие полярность, определяемую знаком ощнбки.
ления, содержащее синхронизатор, ин-
формационные выходы которого соединены с первыми входами блока сравнения, элемент ИЛИ, коммутатор, первый и второй сумматоры, первый и второй интерполяторы, последовательно соединенные блок согласования, электропривод и. датчик обратной связи,-а также блок ввода программы, выходом подключенный к входам первого регистра, первый выход которого соединен с инфор- мационными входами второго регистра, третий регистр, выход которого соединен с информационными входами четвертого регистра, отличающееся тем, что, с целью повьш1ения точности управления, введены пятый и шестой регистры, первые выходы второго регистра соединены с информационными входами третьего регистра, а первые выходы четвертого регистра подключены к информационным входам пятого регистра, выходы которого соединены с первым входом элемента ИЛИ, второй вход которого соединен с вторым выходом четвертого регистра, третий вход - с вторым выходом третьего регистра, четвертый вход - с вторым выходом второго регистра, пятый вход - с вторым выходом первого регистра, шестой вход
элемента ИЛИ подключен к выходу
коммутатора, а выход - к первому входу первого сумматора, второй вход которого соединен с первым выходом шестого регистра, а выход - с информационным входом шестого регистра,
второй выход которого подключен к ин - формационному входу первого интерполятора, выходы которого соединены с первыми входами коммутатора и с информационными входами второго интерполятора, первые выходы которого подключены к вторым входам коммутатора и к первым входам второго сумматора, вторые входы которого соединены с
выходами датчика обратной связи, а выходы - с входами блока согласования, выходы синхронизатора соединены с синхронизирующими входами соответственно блока ввода программы, с первого по шестой регистров, первого и второго интерполяторов и коммутатора, вторые входы блока сравнения подключены к выходам блока ввода программы, а выход - к входу синхронизатора.
Уск-о/}е/ ие()
k
Сере
фие.г
| СПОСОБ ОЧИСТКИ И ОТДЕЛЕНИЯ РАДИЯ ОТ БАРИЯ | 1922 |
|
SU1117A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного управления | 1982 |
|
SU1108392A1 |
