со
00 00
сл
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Система регулирования скорости | 1984 |
|
SU1229727A1 |
| Задающее устройство для цифрового следящего привода | 1978 |
|
SU686018A1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| Устройство для управления автономнымиНВЕРТОРОМ | 1979 |
|
SU830631A1 |
| Управляемый генератор частоты | 1984 |
|
SU1216823A1 |
| Функциональный преобразователь | 1981 |
|
SU960836A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Преобразователь перемещений в код | 1977 |
|
SU674067A1 |
| Устройство для цифрового позиционного управления | 1982 |
|
SU1084740A1 |
ЗАДАЮЩЕЕ УСТРОЙСТВО ДЛЯ ЦИФРОВОГО СЛЕДЯЩЕГО ПРИВОДА, содержащее анализатор кодов, последовательно соединенные генератор импульсов, первый, второй и третий делители частоты, выход последнего подключен к счетному входу реверсивного счетчика импульсов, отличающееся тем, что, с целью повышения точности устройства, в него введены переключатель, блок памяти и формирователь кода, первый выход которого через первый блок памяти соединен с вторым входом второго делителя частоты, второй выход - с третьим входом второго делителя частоты, а первый вход - с выходом первого делителя частоты, причем входы анализатора кодов подключены к соответствующим входам устройства, первый выход подключен через второй и третий блоки памяти соответственно к входам первого и третьего делителей частоты, второй выход - к второму входу формирователя кода и управляющим входам генератора импульсов делителей частоты и реверсивного счетчика импульсов, к информационному входу которого подключен третий выход анализатора кодов, четвертый и пятый выходы которого соединены соответственно с первым инфорi мационным и .управляющим входами переключателя, второй информационный вход коko торого подключен к выходу реверсивного счетчика импульсов, выход - к выходу устройства, а выход второго делителя частоты - к входу третьего делителя частоты.
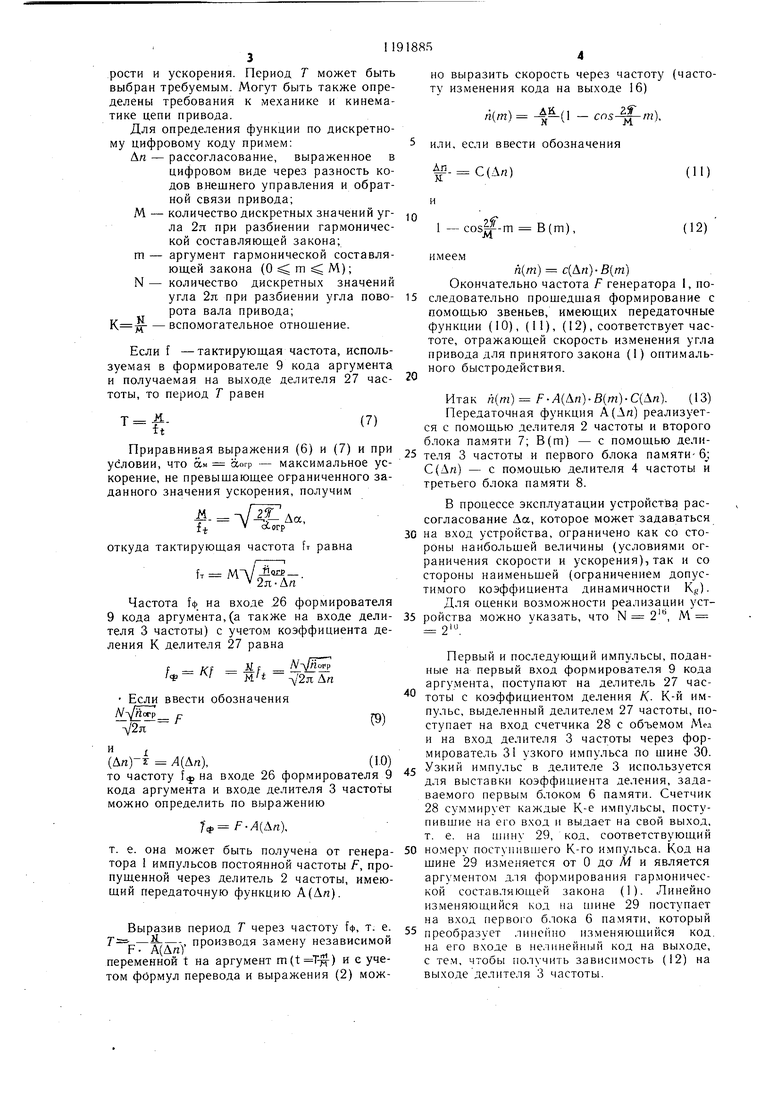
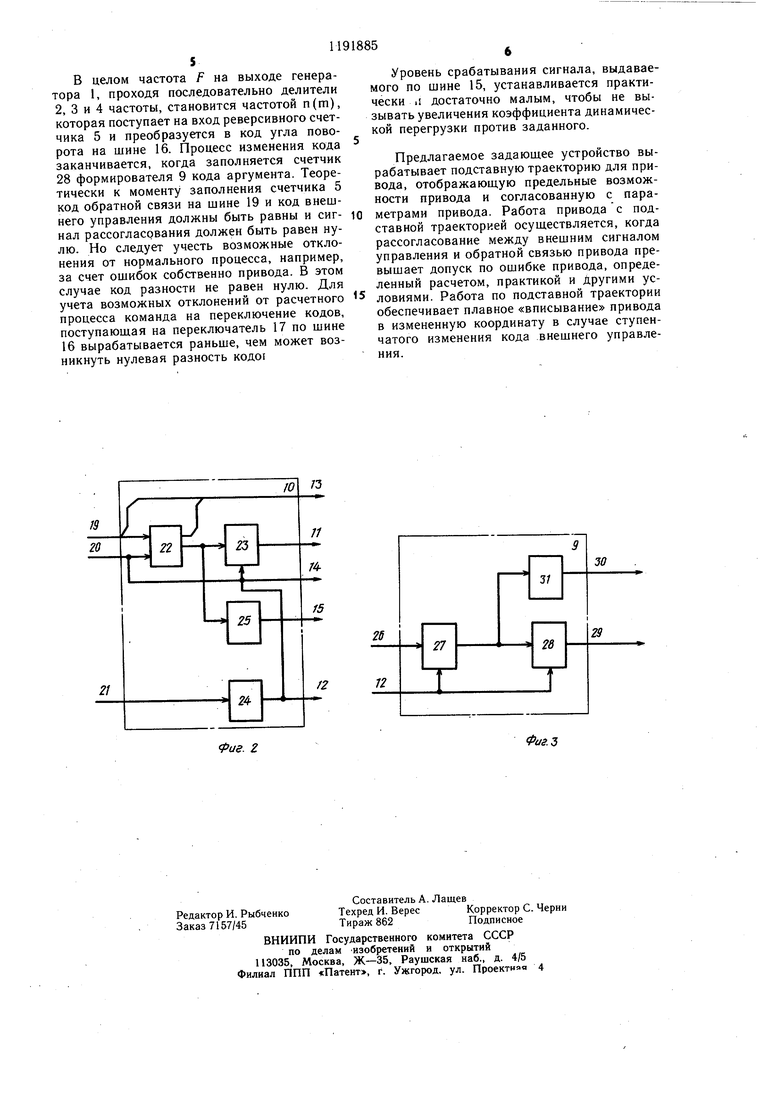
Фиг.1 Изобретение относится к автоматике, в частности к цифровым следящим приводам, и может быть использовано в цифровом следящем приводе при его работе от ЭВМ или другого устройства, имеющего цифровой многоразрядный выход, предназначенный для управления приводом, а также при определении динамических характеристик привода, исследовании или его настройке. Целью изобретения является повышение точности устройства. На фиг. 1 приведена функциональная схема задающего устройства для цифрового следящего привода; на фиг. 2 - функциональная схема анализатора кодов; на фиг. 3 функциональная схема формирователя кода. Устройство содержит генератор 1 импульсов, делители 2, 3 и 4 частоты, реверсивный счетчик 5 импульсов, блоки 6, 7 и 8 памяти,, формирователь 9 кода, анализатор 10 кодов с выходами 11 - 15, выход 16 реверсивного счетчика 5 импульсов, переключатель 17, выход 18 устройства, входы 19.- 21 устройства. Анализатор 10 кодов включает сумматор 22, регистр 23, формирователь 24 узкого импульса и ограничитель 25. Формирователь 9 кода содержит вход 26, делитель 27 частоты, счетчик 28 импульсов, выходы 29 и 30 и формирователь 31 узкогс импульса. Задающее устройство работает следующим образом. По приходу команды разрешения по щине 21 (команда необходима для блокировки ложных рассогласований, вызванных, например, сбоями), по ее переднему фронту, с помощью формирователя 24 узкого импульса вырабатывается узкий импульс, который подается на выход 12 и одновременно на второй вход статического регистра 23 для записи кода разности, постоянно вычисляемой сумматором 22. Записывается одно из возможных значений кодов разности, совпадающих по моменту с узким импульсом, соответствующим началу отсчета времени t 0. Узкий импульс с выхода 12 поступает на генератор 1 для выставки начальной фазы тактирующих импульсов, на делитель 2 час-, тоты для начальной установки коэффициента деления, задаваемого вторым блоком 7 памяти, на делитель 3 частоты для выставки исходного состояния, на делитель 4 частоты для выставки коэффициента деления, задаваемого третьим блоком 8 памяти; на счетчик 5 для записи начальных условий счета, т. е. кода обратной связи привода на момент t О, на формирователь 9 кода для выставки нулевого значения аргумента. На момент t 0 на выходе 13 анализатора 10 кодов имеется код обратной связи привода и знак счета, выработанный сумматором 22, на выходе 14 - внещний код улравления приводом; на выходе 15 - сигнал управления переключателем 17, формируемый ограничителем 25. После ограничения действия узкого и.мпульса (с приходом первого тактирующего импульса на первые входы делителя 3 частоты и формирователя 9 кода) начинается динамический процесс - формирование изменяющейся во времени скорости привода и угла (кода угла) на выходе 16 счетчика 5, выполняющего операцию интегрирования сигнала скорости. Так как привод - объект инерционный, имеющий свои частотные и амплитудные свойства, которые отражаются в ограничениях по скорости, ускорению, динамическим перегрузкам, то задающее устройство должно быть согласованным о наложенными на привод ограничениями. Для реализации принят закон изменения кода угла на выходе устройства (оптимальный по быстродействию с учетом ограничений), который представлен формулой а(0 сг-нац + Да(-| - ; s/n- 4 (О где анач- начальный угол, совпадающий со значением кода угла обратной связи привода на момент t 0; Лес - рассогласование - разность кодов угла внещнего управления при водом и обратной связи привода на момент t 0; Т - период гармонической составляющей закона, реализуемого устройством. Для подтверждения оптимальности этого закона кратко приведем анализ выражения (1). Первая производная от закона (скорость) d(f) 4(l -cos 0Из (2) максимальная скорость d,n 2 Вторая производная от закона (ускорение) а(г) - Aasinr-ГЛ 2л - -«- ь- Т1 Из (3) максимальное ускорение следует период закона Т Из выражений (1) - (6) вытекает, что все зависимости есть функции одной переменной - рассогласования Да, а ускорение по выражению (4) имеет синусоидальную зависимость. Синусоидальность формы ускорения и зависимость закона от одного параметра является целью изобретения. Оптимальность быстродействия закономерности подтверждается тем, что к моменту t Т, т. е. в конце периода, значения скорости и ускорения нулевые и, следовательно, не требуется дополнительное время на переходный процесс, необходимый для гащения скорости и ускорения. Период 7 может быть выбран требуемым. Могут быть также опре делены требования к механике и кинема тике цепи привода. Для определения функции по дискретно му цифровому коду примем: An - рассогласование, выраженное в цифровом виде через разность кодов внешнего управления и обратной связи привода; количество дискретных значений угла 2л при разбиении гармонической составляющей закона; аргумент гармонической составляющей закона (О гп М); N - количество дискретных значений угла 2л при разбиении угла поворота вала привода; - вспомогательное отношение. Если f -тактирующая частота, используемая в формирователе 9 кода аргумента и получаемая на выходе делителя 27 частоты, то период Т равен Т -йПриравнивая выражения (6) и (7) и при условии, что ам ссогр - максимальное ускорение, не превышающее ограниченного заданного значения ускорения, получим Асе, оСогр откуда тактирующая частота fr равна т М 2л-An Частота Гф на входе 26 формирователя 9 кода аргумента, (а также на входе делителя 3 частоты) с учетом коэффициента деления К делителя 27 равна f - ft-f -if - Н Если ввести обозначения гУ2л (Ап)-г Л(Ап),, , то частоту , на входе 26 формирователя 9 кода аргумента и входе делителя 3 частоты можно определить по выражению f FA(n), т. е. она может быть получена от генератора 1 импульсов постоянной частоты F, пропущенной через делитель 2 частоты, имеющий передаточную функцию А(Ап). Выразив период Т через частоту ф, т. е. , производя замену независимой F- А(Ап) переменной t на аргумент m() и е учетом формул перевода и выражения (2) можно выразить скорость через частоту (частоту изменения кода на выходе 16) -1(т (1 - ), или, если ввести обозначения C(An) 1 - cos|r-m B(m), h(m) c(n}-B(m) Окончательно частота F генератора 1, noследовательно прошедшая формирование с помощью звеньев, имеющих передаточные функции (10), (II), (12), соответствует частоте, отражающей скорость изменения угла привода для принятого закона (I) оптимального быстродействия. Итак n(m) fЛ(Ап).В(т)-С(Ал). (13) Передаточная функция А (An) реализуется с помощью делителя 2 частоты и второго блока памяти 7; В (т) - с помощью делителя 3 частоты и первого блока памяти-6j С (An) - с помощью делителя 4 частоты и третьего блока памяти 8. В процессе эксплуатации устройства рассогласование Аа, которое может задаваться на вход устройства, ограничено как со стороны наибольшей величины (условиями ограничения скорости и ускорения),так и со стороны наименьшей (ограничением допустимого коэффициента динамичности Kg). Для оценки возможности реализации устройства можно указать, что , М Первый и последующий импульсы, поданные на первый вход формирователя 9 кода аргумента, поступают на делитель 27 частоты с коэффициентом деления К. К-й импульс, выделенный делителе.м 27 частоты, поступает на вход счетчика 28 с объемом Мед и на вход делителя 3 частоты через формирователь 31 узкого импульса по шине 30. Узкий импульс в делителе 3 используется для выставки коэффициента деления, задаваемого первым 6viOKOM 6 памяти. Счетчик 28 суммирует каждые К-е импульсы, поступившие на его вход и выдает на свой выход, т. е. на шину 29, код, соответствующий номеру поступившего К-го импульса. Код на шине 29 изменяется от О до М и является аргументом для формирования гармонической составляющей закона (1). Линейно изменяющийся код на шине 29 поступает на вход первого блока 6 памяти, который преобразует линейно изменяющийся код. на его в.чоде в не.чинейный код на выходе, с тем, чтобы получить зависимость (12) на выходе делителя 3 частоты. В целом частота F на выходе генератора 1, проходя последовательно делители 2, 3 и 4 частоты, становится частотой n(m), которая поступает на вход реверсивного счетчика 5 и преобразуется в код угла поворота на шине 16. Процесс изменения кода заканчивается, когда заполняется счетчик 28 формирователя 9 кода аргумента. Теоретически к моменту заполнения счетчика 5 код обратной связи на шине 19 и код внеш VJVyi-CtiriV/II ViLJ/li d 1.1Ч kLJ -V .- ... него управления должны быть равны и сиг-ю нал рассогласования должен быть равен нулю. Но следует учесть возможные отклонения от нормального процесса, например, за счет ошибок собственно привода. В этом случае код разности не равен нулю. Для учета возможных отклонений от расчетного процесса команда на переключение кодов, поступающая на переключатель 17 по щине 16 вырабатывается раньше, чем может возникнуть нулевая разность Уровень срабатывания сигнала, выдаваемого по шине 15, устанавливается практически ii достаточно малым, чтобы не вызывать увеличения коэффициента динамической перегрузки против заданного. Предлагаемое задающее устройство вырабатывает подставную траекторию для привода, отображающую предельные возможности привода и согласованную с параГг-I метрами привода. Работа привода с подставной траекторией осуществляется, когда рассогласование между внешним сигналом управления и обратной связью привода превышает допуск по ошибке привода, определенный расчетом, практикой и другими условиями. Работа по подставной траектории обеспечивает плавное «вписывание привода в измененную координату в случае ступенчатого изменения кода внешнего управления.
| Авторское свидетельство СССР № 760032, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Задающее устройство для цифрового следящего привода | 1978 |
|
SU686018A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
