(54) ГРАВИТАЦИОННЫЙ РОЛИКОВЫЙ КОНВРЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи грузов | 1987 |
|
SU1460002A1 |
| Гравитационный роликовый конвейер | 1978 |
|
SU740618A1 |
| Гравитационный конвейер | 1977 |
|
SU713778A1 |
| Устройство для передачи грузов с наклонной секции гравитационного роликового конвейера на горизонтальную секцию | 1983 |
|
SU1105423A1 |
| Устройство для поштучной выдачи грузов с гравитационного рольганга | 1982 |
|
SU1084213A1 |
| Устройство для передачи грузов с наклонной роликовой секции на прямолинейную | 1980 |
|
SU865752A1 |
| Устройство для передачи грузов | 1979 |
|
SU829516A1 |
| Устройство для передачи грузов | 1989 |
|
SU1641744A1 |
| Устройство для передачи грузов с наклонной секции гравитационного конвейера на горизонтальную секцию | 1982 |
|
SU1041453A1 |
| Тормозное устройство гравитационной дорожки | 1981 |
|
SU988675A1 |
i
Изобретение относится к промышленному транспорту, а именно к гравитационным конвейерам.
Известен гравитационный роликовый конвейер для штучных грузов, содержащий опорные ролики, оси которых смонтированы в подшиппиках на раме с возможностью перемещения за счет вертикально-замкнутых тяговых цепей, расположенных на смонтированных на раме направляющих, причем на цепях через одинаковый интервал установлены кронштейны, возрастающие по величине 1 .
Недостатком такого устройства являются ударные нагрузки, возникающие при переходе с одного участка конвейера на другой.
Наиболее близким к предлагаемому является гравитационный роликовый конвейер, содержапи Й наклонную раму с роликами, горизонтальную раму е роликами и переходной участок 2.
Недостатком такого устройства являются ударные нагрузки, возникающие на переходном участке.
Целью изобретения является повышение сохранности груза путем исключения ударных нагрузок на переходном участке.
Это достигается тем, что конвейер имеет опорную площадку с основными и дополнительными наклонными направляющими, на которых с возможностью перемещения по ним установлены соединенные тяга.ми вспомогательные полые ролики, внутри которых установлены выступающие из них ступицы, а на осях этих роликов по сторонам ступиц свободно закреплены катки, причем ступицы опираются на основные Иаправляющ.ие, а катки - на дополнительные, при этом дополнительные направляющие снабжены подпружиненными замками для фиксации катков.
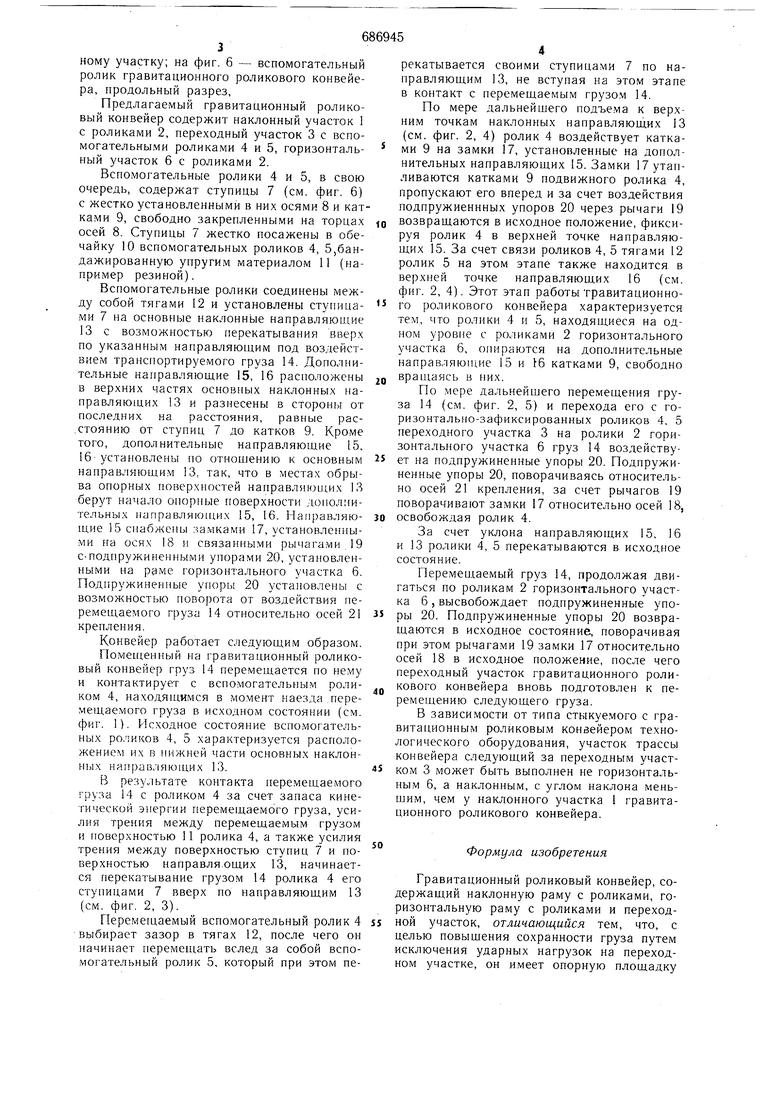
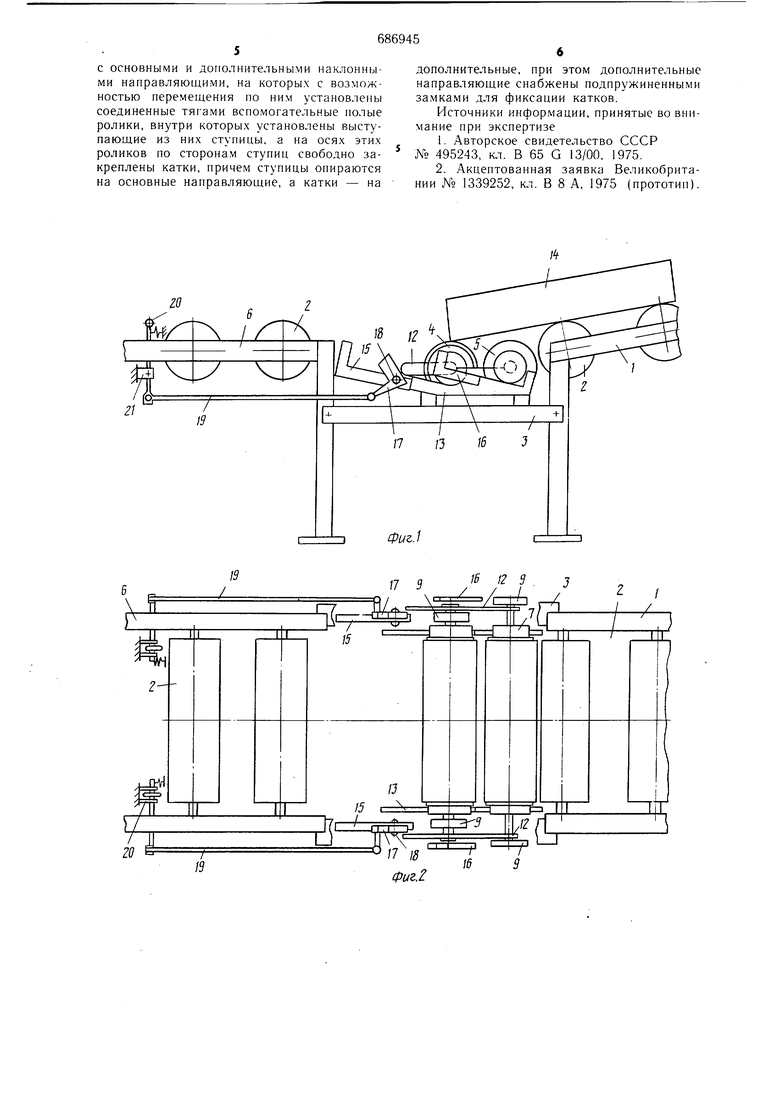
На фиг. 1 изображен гравитационный роликовый конвейер в момент наезда груза на переходный участок; на фиг. 2 - конвейер без груза, вид сверху; на фиг. 3 - конвейер в момент движения груза по переходному участку; на фиг. 4 - конвейер в момент окончания движения груза по переходному участку; на фиг. 5 - конвейер в момент перемещения груза по горизонтальному участку; на фиг. 6 - вспомогательный ролик гравитационного роликового конвейера, продольный разрез, Предлагаемый гравитационный роликовый конвейер содержит наклонный участок 1 с роликами 2, переходный участок 3 с вспомогательными роликами 4 и 5, горизонтальный участок 6 с роликами 2. Вспомогательные ролики 4 и 5, в свою очередь, содержат ступицы 7 (см. фиг. 6) с жестко установленными в них осями 8 и катками 9, свободно закрепленными на торцах осей 8. Ступицы 7 жестко посажены в обечайку 10 вспомогательных роликов 4, 5,бандажированную упругим материалом 11 (например резиной). Вспомогательные ролики соединены между собой тягами 12 и установлены ступицами 7 на основные наклонные направляющие 13 с возможностью перекатывания вверх по указанным направляющим под воздействием транспортируемого груза 14. Дополнительные направляющие 15, 16 расположены в верхних частях основных наклонных направляю1цих 13 и разнесены в стороны от последних на расстояния, равные рас.стоянию от ступиц 7 до катков 9. Кроме того, дополнительные направляющие 15, 16 установлены по отнощению к основным направляющим 13, так, что в местах обрыва опорных поверхностей направляюии1х 13 берут начало опорные поверхности дополнительных направляющих 15, 16. Направляющие 15 снабжены замками 17, установле П1ыми на осях 18 и связанными рычага.ми 19 с-подпружиненными упорами 20, установленными на раме горизонтального участка 6. Подпружиненные упорь 20 установлены с возможностью поворота от воздействия перемещаемого груза 14 относительно осей 21 крепления. Конвейер работает следующим образом. Помещенный на гравитационный роликовый конвейер груз 14 перемещается по нему и контактирует с вспомогательным роликом 4, находящимся в момент наезда,перемещаемого груза в исходном состоянии (см. фиг. 1). Исходное состояние вспомогательных роликов 4, 5 характеризуется расположением их в нижней части основных нак.тонных направ;1яющих 13. В результате контакта перемещаемого груза 14 с роликом 4 за счет запаса кинетической энергии перемещаемого груза, усилия трения между перемещаемым грузом и поверхностью 11 ролика 4, а также усилия трения между поверхностью ступиц 7 и поверхностью направляющих 13, начинается перекатывание грузом 14 ролика 4 его ступицами 7 вверх по направляющим 13 (см. фиг. 2, 3). Перемещаемый вспомогательный ролик 4 выбирает зазор в тягах 12, после чего он начинает перемещать вслед за собой вспомогательный ролик 5, который при этом перекатывается своими ступицами 7 по направляющим 13, не вступая на этом этапе в контакт с перемещаемым грузом 14. По мере дальнейшего подъе.ма к верхним точкам наклонных направляющих 13 (см. фиг. 2, 4) ролик 4 воздействует катками 9 на замки 17, установленные на дополнительных направляющих 15. Замки 17 утапливаются катками 9 подвижного ролика 4, пропускают его вперед и за счет воздействия подпружиеннных упоров 20 через рычаги 19 возвращаются в исходное положение, фиксируя ролик 4 в верхней точке направляющих 15. За счет связи роликов 4, 5 тягами 12 ролик 5 на этом этапе также находится в верхней точке направляющих 16 (см. фиг. 2, 4). Этот этап работы гравитационного роликового конвейера характеризуется тем, что ролики 4 и 5, находящиеся на одном уровне с роликами 2 горизонтального участка 6, опираются на дополнительные направляюп ие 15 и 16 катками 9, свободно врап1аясь в них. По мере дальнейщего перемещения груза 14 (см. фиг. 2, 5) и перехода его с горизонтально-зафиксированных роликов 4, 5 переходного участка 3 на ролики 2 горизонтального участка 6 груз 14 воздействует на подпружиненные упоры 20. Подпружиненные упоры 20, поворачиваясь относительно осей 21 крепления, за счет рычагов 19 поворачивают замки 17 относительно осей 18, освобождая ролик 4. За счет уклона направляющих 15, 16 и 13 ролики 4, 5 перекатываются в исходное состояние. Перемещаемый груз 14, продолжая двигаться по роликам 2 горизонтального участка 6 , высвобождает подпружиненные упоры 20. Подпружиненные упоры 20 возвращаются в исходное состояние, поворачивая при этом рычагами 19 замки 17 относительно осей 18 в исходное положение, после чего переходный участок гравитационного роликового конвейера вновь подготовлен к перемещению следующего груза. В зависимости от типа стыкуе.мого с гравитационным роликовым конвейером технологического оборудования, участок трассы конвейера следующий за переходным участком 3 может быть выполнен не горизонтальным 6, а наклонным, с углом наклона меньщим, чем у наклонного участка 1 гравитационного роликового конвейера. Формула изобретения Гравитационный роликовый конвейер, содержащий наклонную раму с роликами, горизонтальную раму с роликами и переходной участок, отличающийся тем, что, с целью повышения сохранности груза путем исключения ударных нагрузок на переходном участке, он имеет опорную площадку
с основными и дополнительными наклонными направляющими, на которых с возможностью перемещения по ним установлены соединенные тягами вспомогательные полые ролики, внутри которых установлены выступающие из них ступицы, а на осях этих роликов по сторонам ступиц свободно закреплены катки, причем ступицы опираются на основные направляющие, а катки - на
/-1
дополнительные, при этом дополнительные направляющие снабжены подпружиненными замками для фиксации катков.
Источники информации, принятые во внимание при экспертизе
