(54) ГРАВИТАЦИОННЫЙ РОЛИКОВЫЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи грузов с наклонной секции гравитационного конвейера на горизонтальную секцию | 1982 |
|
SU1041453A1 |
| Устройство для передачи грузов | 1979 |
|
SU829516A1 |
| Гравитационный роликовый конвейер | 1977 |
|
SU686945A1 |
| Устройство для передачи грузов с наклонной секции гравитационного роликового конвейера на горизонтальную секцию | 1983 |
|
SU1105423A1 |
| Устройство для передачи грузов с наклонной роликовой секции на прямолинейную | 1980 |
|
SU865752A1 |
| Устройство для передачи грузов | 1989 |
|
SU1641744A1 |
| Гравитационный конвейер | 1977 |
|
SU713778A1 |
| Перегрузочное устройство для штучных грузов | 1977 |
|
SU701896A1 |
| Тормозной ролик гравитационного роликового конвейера | 1981 |
|
SU1028569A1 |
| Устройство для передачи грузов | 1987 |
|
SU1460002A1 |
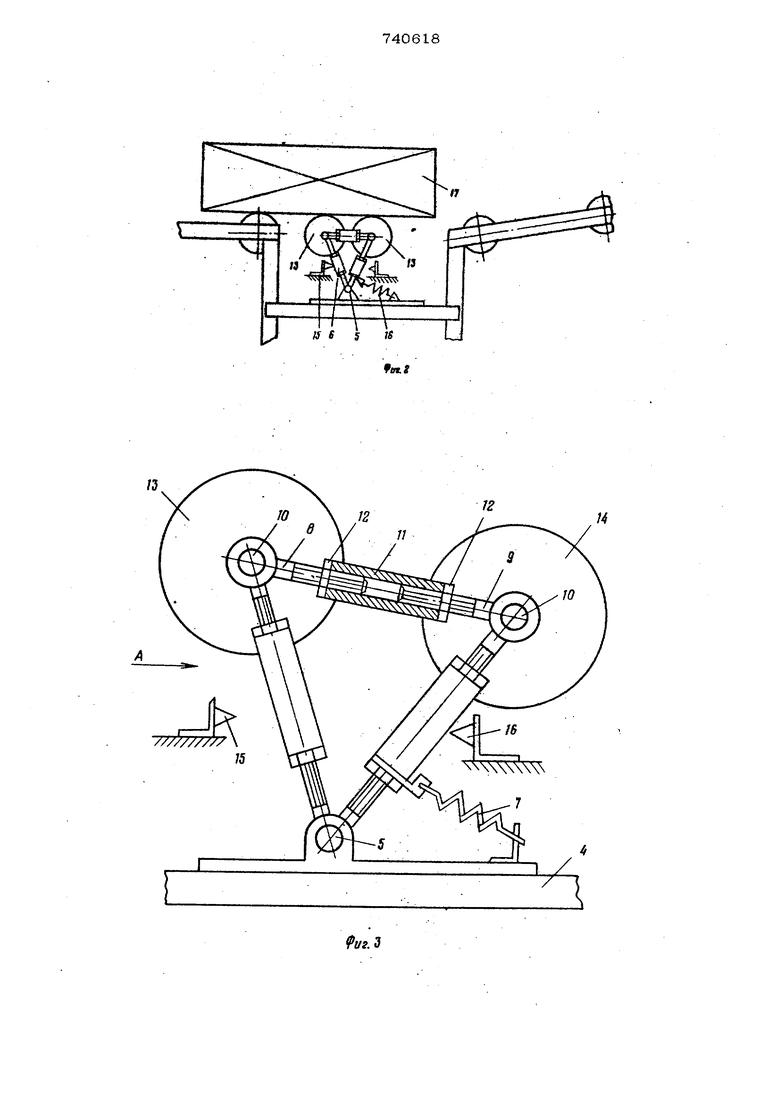
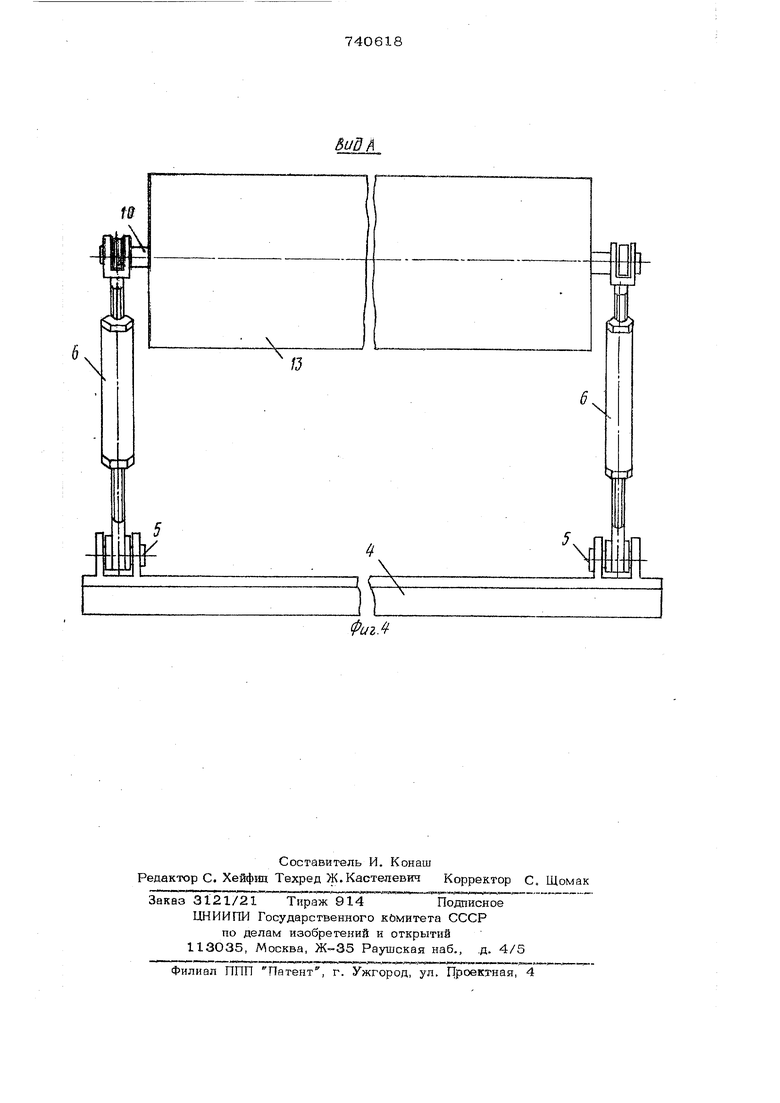
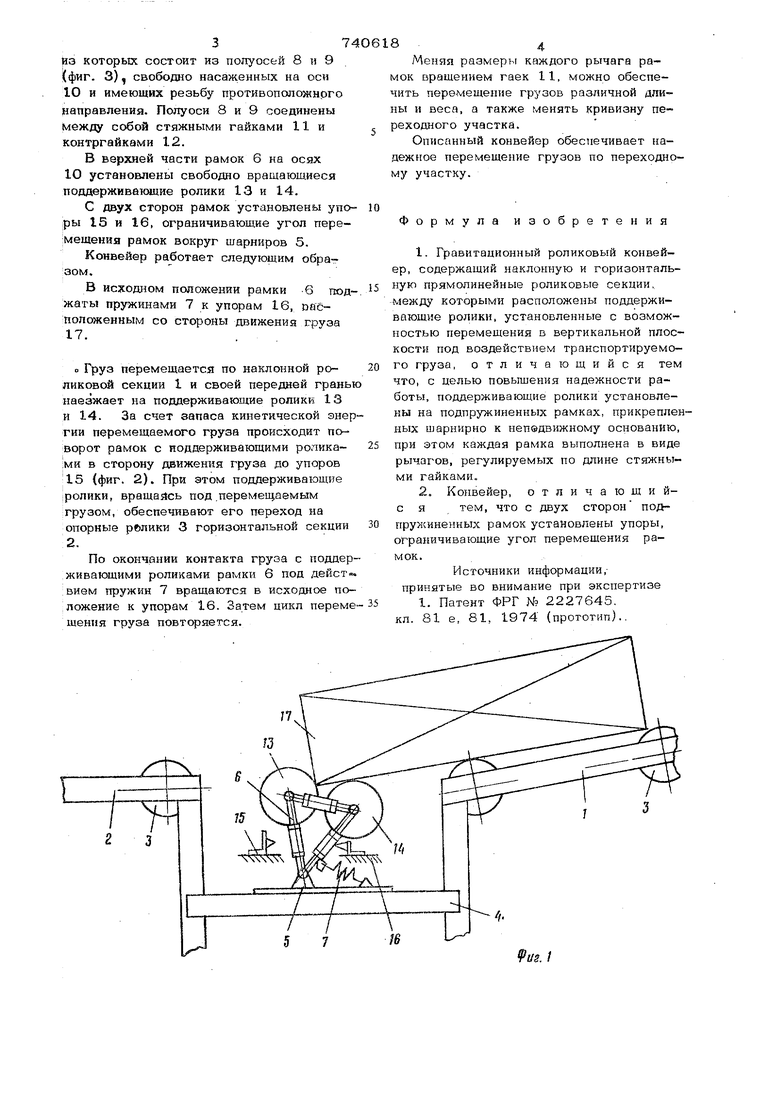
Изобретение относится к области под .емно-транспортного машиностроения. Известен гравитационный роликовый конвейер, содержащий наклонную и горизонтальную прямолинейные роликовые сек ции, между которыми распрпожены., подде живающие ролики, установленные с воэможностью перемещения в вертикальной плоскости под еоадеййтвием транспор тируемого груза lj Недостатком известного гравитационного роликового конвейера является то, что при определенных соотношениях масс перемещаемого груза и промежуто .ных поддёря:ивающих роликов, а также при большей вогнутости переходного участка возможно проскальзывание поддерживающих роликов .под транспортируемым грузом, что снижает надежность работы конвейера. Целью изобретения является повышение надежности работы конвейера. Эта цель достигается тем, что поддерживающие ролики установлены на jiojtпружиненных рамках, прикрепленных шарннрно к неподвижному основанию, при этом каждая рамка выполнена в виде рычагов, регулируемых по длине стяжны:ми гайками. С двух сторон подпружиненных рамок установлены упорыг ограничивающие угол перемещения рамок. На фиг. 1 изображен роликовый конвейер в момент наезда груза на поддерживающие ролики; на фиг. 2 - то же, в момент движения груза по поддерживающим роликам; на фиг.З - рамка с поддерживающими роликами; на фиг. 4 - вид по стрелке А на фиг. 3. Гравитационный роликовый конвейер содержит наклонную роликовую 1 и горизонтальную 2 прямолинейные секции с опорными роликами 3 между секциями. На основании 4 в шарнирах 5 установлены рамки 6, связанные с пружиной 7. Рамки выполнены в виде трех рычагов, каждый |яз которых состоит из полуосей 8 н 9 (фиг. 3), свободно насаженных на оси 10 и имеющих резьбу противоположного направления. Полуоси 8 и 9 соединены между собой стяжными гайками 11 и контргайками 12. В верхней части рамок 6 на осях 10 установлены свободно вращающиеся поддерживающие ролики 13 и 14. С двух сторон рамок установлены уп ры 15 и 16, ограничивающие угол пере мещения рамок вокруг шарниров 5. Конвейер работает следующим образом. В ИСХОД1ШМ положении рамки -6 тю жаты пружинами 7 к упорам 16, оасположенным со стороны движения груза о Груз перемещается по наклонной роликовой секции 1 и своей передней грань наезжает на поддерживающие ролики 13 и 14. За счет sanaca кинетической эне гии перемещаемого груза происходит поворот рамок с поддерживающими роликами в сторону движения груза до упоров 15 (фиг. 2). При этом поддерживающие ролики, вращайсь под .перемещаемым грузом, обеспечивают его переход на опорные рблики 3 горизонтальной секции 2. По окончании контакта груза с поддер живающими роликами рамки 6 под деист вием пружин 7 вращаются в исходное по ложение к упорам 16. Затем цикл перем шения груза повторяется. 8 Меняя размеры каждого рычага рамок вращением гаек 11, можно обеспечить перемещение грузов различной длины и веса, а также менять кривизну переходного участка. Описанный конвейер обеспечивает па- дежное перемещение грузов по переходному участку. Формула изобретения 1.Гравитационный роликовый конвейер, содержащий наклонную и горизонтальную прямолинейные роликовые секции,, между которыми расположены поддерживающие ролики, установленные с возможностью перемещения в вертикальной плоскости под воздействием транспортируемого груза, отличающийся тем что, с целью повьпиения надежности работы, поддерживающие ролики установлены на подпружиненных рамках, прикрепленных шарнирно к непфдвижному основанию, при этом каждая рамка выполнена в виде рычагов, регулируемых по длине стяжными гайками. 2,Конвейер, отличающийс я тем, что с двух сторон подпружиненных рамок установлены упоры, ограничивающие угол перемещения рамок. Источники информации,принятые во внимание при экспертизе 1. Патент ФРГ № 2227645. кл. 81 е, 81, 1974 (прогогип)..
Л.
л
/J
