1
Изобретение относится к подъемнотранспортному машиностроению, а имеН но к гравитационным роликовым конвейерам, .обеспечивающим передачу грузов с наклонных участков гравитационных конвейеров на горизонтальные участки.
Известно устройство для передачи грузов, состоящее из роликов, каждый из которых ВЕ4полнен со спиральным сечением, и противовесов 1.
Однако из-за дебешансировки роликов устройства транспортируеилй груз может испытывать ударные нагрузки.
Известно также устройство для .передачи грузов, преимущественно с наклонной секции граъвнтационного конвейера на горизонтальную секцию, содержащее рамку, поворотную в вертикальной плоскости под воздействием транспортируемого груза, на которой закреплены поддерживающие ролики, и установленную на основании и упоры, ограничиваюг е поворот рамки 2 .
Указанное устройство для передачи грузов также не исключает возникновения ударных нагрузок при переходе груза с наклонней секции гравитационного конвейера на горизонтгшьную секцию.
Цель изобретения - повышение надежности работы посредством повышения плавности перемещения груза по поддерживающим роликам.
Указанная цель достигается тем, что устройство снабжено эксцентрично закрепленным на основании и расположенным между роликами рамки подпружиненным поворотным диском и
0 ограничителем поворота упомянутого диска, при этом точка крепления пружины к диску расположена по ходу движения груза перед точкой кропления его к основанию.
5
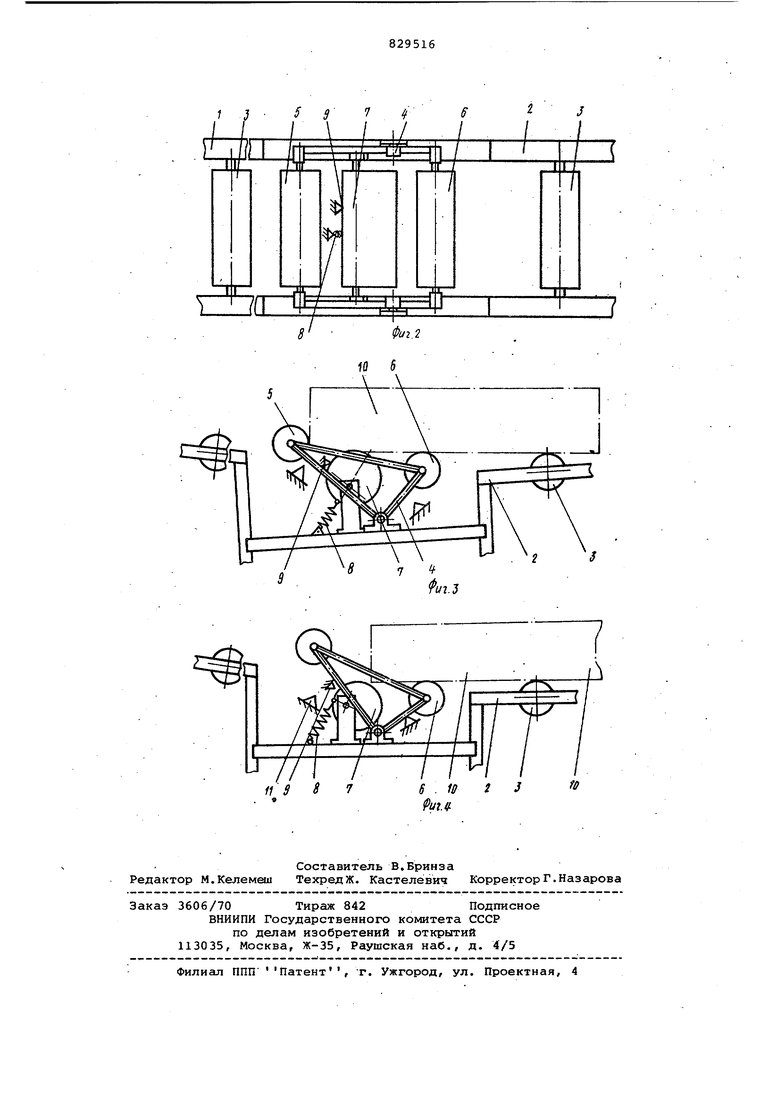
На фиг. 1 изображено предлагаемое устройство для передачи грузов, момент наезда груза на поддерживающие ролики; на фиг. 2 - то же,.вид сверху; на. фиг. 3 - то же, момент начала взаимодействия груза с эксцентричным роликом; на фиг. 4 - то же, момент окончания перехода груза на горизонТёшьный участок.
Устройство расположено между нак5лонной 1 и горизонтальной 2 прямолинейных роликовых секций с роликами 3 гравитационного роликового конвейера и содержит рамку 4 с поддерживающими роликами 5 и 6. в плоскости рамки 4
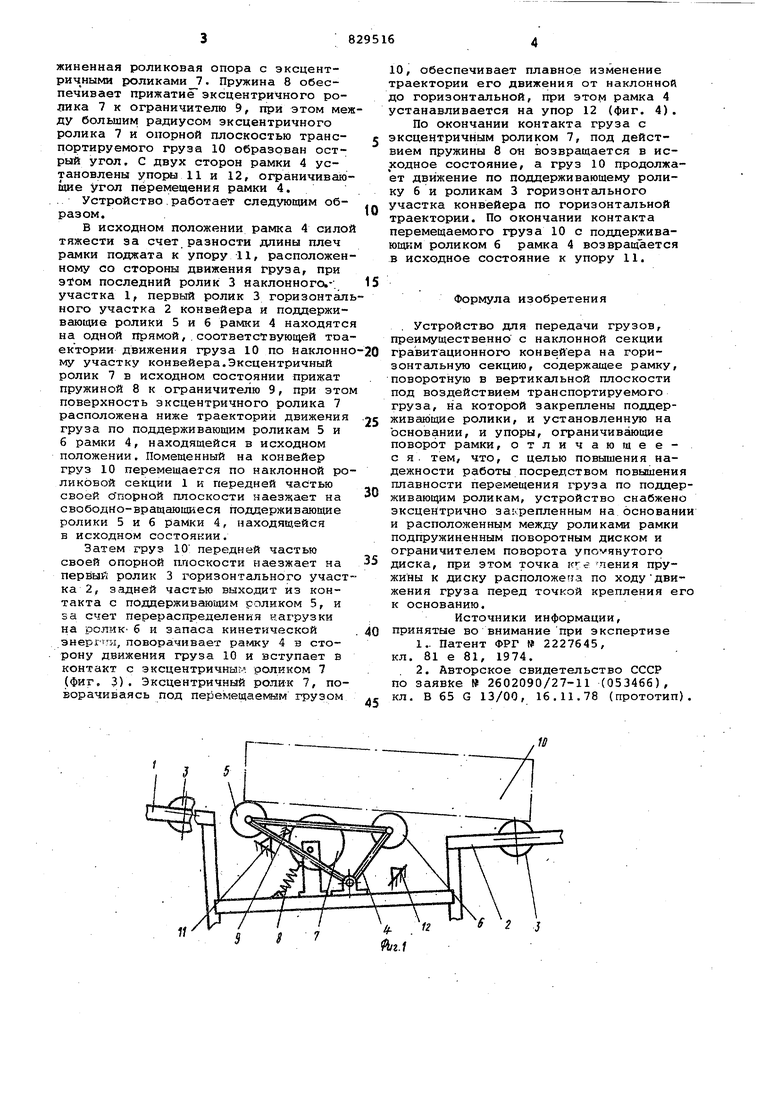
O независимо от нее установлена полпружиненная роликовая опора с эксцентричными роликами 7. Пружина 8 обеспечивает прижатие эксцентричного ролика 7 к ограничителю 9, при этом ме ду большим радиусом эксцентричного ролика 7 и опорной плоскостью транспортируемого груза 10 образован острый угол, С двух сторон рамки 4 установлены упогмл 11 и 12, ограничиваю щие угол перемещения рамки 4. Устройство,работает следующим образом. В исходном положении рамка 4 сило тяжести за счет разности длины плеч рамки поджата к упору 11, расположен ному со стороны движения fpyaa, при последний ролик 3 наклонного,-, участка 1, первый ролик 3 горизонтал ного участка 2 конвейера и поддерживаюише ролики 5 и б рамки 4 находятс на одной прямой,.соответствующей тра ектории движения груза 10 по йаклонн му участку конвейера,Эксцентричный ролик 7 в исходном состоянии прижат пружиной 8 к ограничителю 9, при это поверхность эксцентричного ролика 7 расположена ниже траектории движения груза по поддерживающим роликам 5 и б рамки 4, находящейся в исходном положении. Помещенный на конвейер груз 10 перемещается по наклонной ро ликовой секции 1 и передней частью своей опорной плоскости наезжает на свободно-вращающиеся поддерживающие ролики 5 и б рамки 4, находящейся в исходном состоянии. Затем груз 10 передней частью своей опорной п.поскости наезжает на первый ролик 3 горизонтального участ ка 2, задней частью выходит из контакта с поддерживающим роликом 5, и за счет перераспределения нагрузки на ролик- б и запаса кинетической энергтги, поворачивает рамку 4 в сторону движения груза 10 и вступает в контакт с эксцентричным роликом 7 (фиг. 3). Эксцентричный ролик 7, поворачиваясь под перемещаемым грузом
11 10, обеспечивает плавное изменение траектории его движения от наклонной о горизонтальной, при этом рамка 4 устанавливается на упор 12 (фиг, 4), По окончании контакта груза с эксцентричным роликом 7, под действием пружины 8 он возвращается в исходное состояние, а груз 10 продолжает движение по поддерживающему ролику 6 и роликам 3 горизонтального участка конвейера по горизонтальной траекторни. По окончании контакта перемещаемого груза 10 с поддерживающим роликом б рамка 4 возвращается в исходное состояние к упору 11. Формула изобретения Устройство для передачи грузов, преимущественно с наклонной секции гравитационного конвейера на горизонтальную секцию, содержащее рамку, поворотную в вертикальной плоскости под воздействием транспортируемого груза, на которой закреплены поддерживан)щие ролики, и установленную на основании, и упоры, ограничивающие поворот рамки, отличающееся, тем, что, с целью повышения надежности работы посредством повышения плавности перемещения груза по поддерживающим роликам, устройство снабжено эксцентрично закрепленным на основании и расположеннь1м между роликами рамки подпружиненным поворотным диском и ограничителем поворота упомянутого диска, при этом точка кге ления пружины к диску расположена по ходу движения груза перед точкой крепления его к основанию. Источники информации, принятые во вниманиепри экспертизе 1,. Патент ФРГ 2227645, кл, 81 е 81, 1974, 2. Авторское свидетельство СССР по заявке 2602090/27-11 (053466), кл. В 65 G 13/00, 16.11.78 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи грузов с наклонной секции гравитационного роликового конвейера на горизонтальную секцию | 1983 |
|
SU1105423A1 |
| Гравитационный роликовый конвейер | 1978 |
|
SU740618A1 |
| Устройство для передачи грузов с наклонной секции гравитационного конвейера на горизонтальную секцию | 1982 |
|
SU1041453A1 |
| Устройство для передачи грузов | 1989 |
|
SU1641744A1 |
| Устройство для передачи грузов | 1987 |
|
SU1460002A1 |
| Гравитационный роликовый конвейер | 1977 |
|
SU686945A1 |
| Гравитационный конвейер | 1977 |
|
SU713778A1 |
| Устройство для передачи грузов с наклонной роликовой секции на прямолинейную | 1980 |
|
SU865752A1 |
| Перегрузочное устройство для штучных грузов | 1977 |
|
SU701896A1 |
| Гравитационный роликовый конвейер | 1986 |
|
SU1393718A1 |