Физ.1
воротную от привода 7 стойку 5, на которой установлена платформа (П) 1 с роликами 2, и смонтированный на раме 6 копир 12. При этом П 1 установлена на стойке поворотно в вертикальной плоскости посредством оси, связанной с последним по ходу перемещения по П 1 груза роликом 2, и имеет смонтированный на вертикальной оси бандажированный диск (БД) 4, шарнирно установленный на ее выходном участке подпружиненный упор 13 и шарнирно закрепленную тягу 10 с катком II. Последний перемещается по копиру 12, который расположен по винтовой линии и вьтолнен из двух горизонтально расположенных и связывающего их наклонного участка. На К 17 имеется неподвижный упор 14 для взаимодействия с упором 13 и дополнительный БД 20, связанный с первым по ходу перемещения груза роликом К 17 через шестерен-- чатую передачу, состоящую из шесте- ,рен 18, 19. Ролики П 1 связаны меж- .ду собой цепью 3. Груз с К 15 поступает на П 1 и останавливается при соприкосновении с упором 13. От при- . вода 7 осуществляется поворот П 1 и ее опускание до горизонтального положения при обкатьшании катка II по копиру 12. Упор 13 поворачивается от взаимодействия с упором 14 БД 4 входит в контакт с БД 20, и осуществляется вращение роликов 2 и переход груза на К 17. 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Перегрузочное устройство для штучных грузов | 1977 |
|
SU701896A1 |
| Гравитационный роликовый конвейер | 1977 |
|
SU686945A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Устройство для передачи грузов | 1989 |
|
SU1641744A1 |
| Перегрузочное устройство для штучных грузов | 1982 |
|
SU1046184A1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
| Устройство для поперечной передачи асбестоцементных изделий с одного конвейера на другой | 1986 |
|
SU1418054A1 |
| Поргузочно-разгрузочное устройстводля пОдВЕСНОгО КОНВЕйЕРА | 1979 |
|
SU814828A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ РЕЛЬСОВЫХ ПОДКЛАДОК "ПОДОШВОЙ ВНИЗ" | 1999 |
|
RU2176002C2 |
| Устройство для передачи грузов | 1979 |
|
SU829516A1 |
Изобретение относится к подъемно-транспортному оборудованию и позволяет снизить энергоемкость. Устройство включает расположенные под углом и на разном уровне подающий и приемные роликовые конвейеры (К) 15-17, смонтированную на раме 6 по(Л
1
Изобретение относится к подъемно- транспортному машиностроению, а именно к системам роликовых конвейе- ров, обеспечивающим передачу грузов с наклонного на горизонтальный конвейер с одновременным изменением направления движения грузов.
Целью изобретения является снижение энергоемкости устройства.
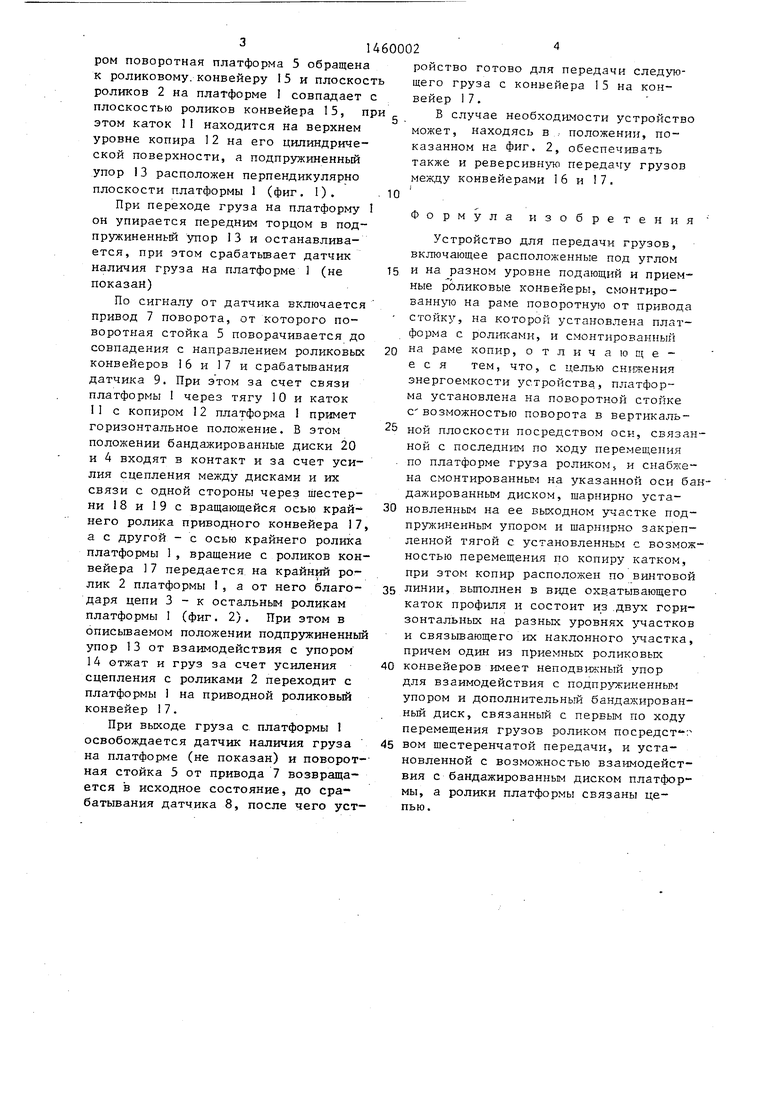
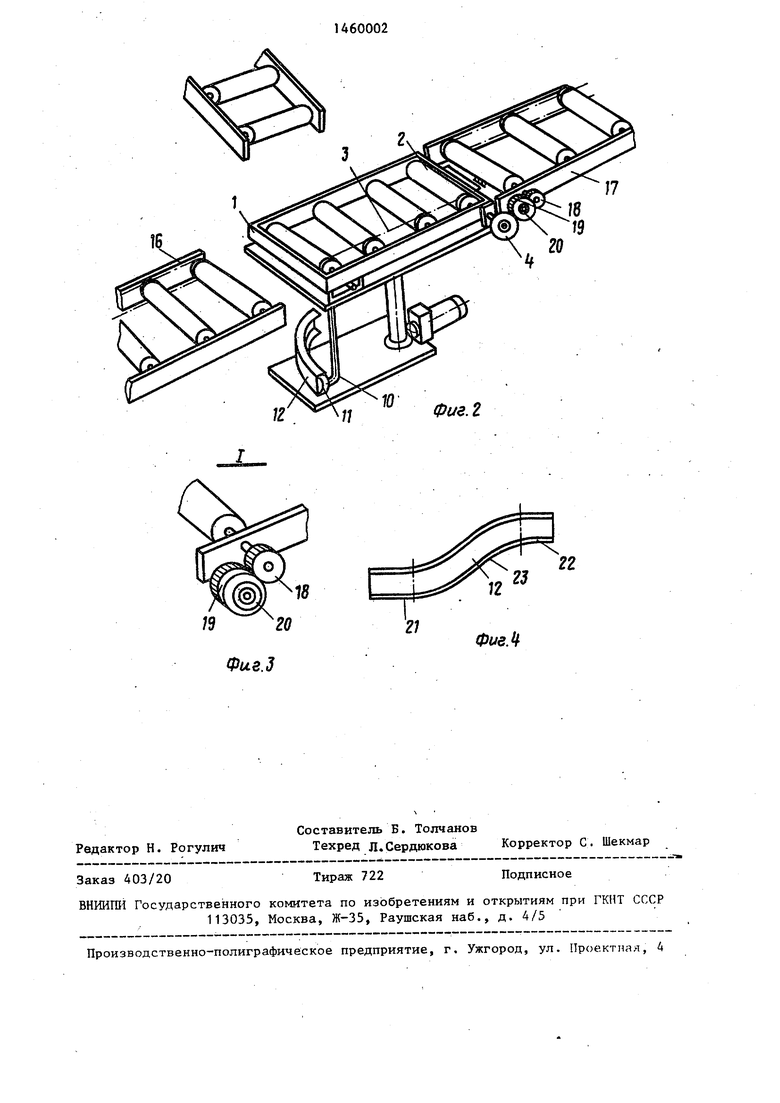
На фиг. 1 изображено предлагае-. мое устройство, положение приема груза с наклонного конвейера; на фиг о 2 - то же, положение передачи груза на горизонтальный конвейер; на фиг о 3 - узел I на фиг. Ij на фиг. 4 развертка копира.
Устройство содержит платформу 1 с роликами 2, охваченными общей цепью 3. На оси последнего по ходу перемещения по платформе груза ролика жестко посажен бандажированный диск 4
Платформа 1 установлена на поворот ной стойке 5 на оси ролика с возможностью поворота в вертикальной плоскости. Поворотная стойка 5 установлена на раме 6 и связана с приводом 7 поворота. В зоне поворота; платформы 1 размещены датчики 8 и 9 положения. В поворотной стойке 5 перпендикулярно плоскости ее поворота установлена с возможностью возвратно-поступательного перемещения тяга 10, верхний ко10
15
нец которой шарнирно связан с платформой 1, а нижний - через свободно вращающийся каток 11 с копиром 12. На платформе 1 со стороны шарниров 5 установлен подпружиненньй упор 13. ; В крайнем положении поворотной стой- iки 5 установлен неподвижный упор 14 для взаимодействия с упором 13.
Устройство размещается между на- клонньЕ роликовым конвейером 15 и
горизонтальными приводными роликовы- ми конвейерами 16 и 17. На крайнем ролике конвейера 17, обращенным к устройству, жестко посажена шестерня 18, взаимодействующая со свободно- вращающимся блоком из соосных шестерен 19 и бандажированного диска 20.
Копир 12 выполнен по винтовой ли- Р НИИ и содержит горизонтально расположенные участки 21 и 22, расположенные на разных уровнях, и заключенный между ними наклонный участок 23. Шестерни J8 и 19 образуют шестеренчатую 25 передачу.
Устройство работает следующим образом.
Транспортируемый груз с наклонного роликового конвейера 15 поступает эп под действием силы тяжести на устройство, находящееся в исходном состоянии. Исходное состояние устройства характеризуется положением, в кото
ром поворотная платформа 5 обращен к роликовому, конвейеру 15 и плоско роликов 2 на платформе I совпадает плоскостью роликов конвейера 15, этом каток 1I находится на верхнем уровне копира 12 на его цилиндрической поверхности, а подпружиненньй упор 13 расположен перпендикулярно плоскости платформы 1 (фиг, 1).
При переходе груза на платформу он упирается передним торцом в подпружиненньй упор 13 и останавливается, при этом срабатьшает датчик наличия груза на платформе 1 (не показан)
По сигналу от датчика включаетс привод 7 поворота, от которого поворотная стойка 5 поворачивается до совпадения с направлением роликовых конвейеров 16 и 17 и срабатьюания датчика 9. При этом за счет связи платформы I через тягу 10 и каток II с копиром 12 платформа примет горизонтальное положение. В этом положении бандажированные диски 20 и 4 входят в контакт и за счет усилия сцепления между дисками и их связи с одной стороны через шестерни 1 8 и 1 9 с вращающейся осью крайнего ролика приводного конвейера 17 а с другой - с осью крайнего ролика платформы 1, вращение с роликов конвейера 17 передается на крайний ролик 2 платформы 1, а от него благодаря цепи 3 - к остальным роликам платформы I (фиг. 2). При этом в описываемом положении подпружиненны упор 13 от взаимодействия с упором 14 отжат и груз за счет усиления сцепления с роликами 2 переходит с платформы 1 на приводной роликовый конвейер 17.
При выходе груза с платформы 1 освобождается датчик наличия груза на платформе (не показан) и поворот ная стойка 5 от привода 7 возвращается JB исходное состояние, до срабатывания датчика 8, после чего уст
ройство готово для передачи следующего груза с конвейера 15 на конвейер 17.
В случае необходимости устройство может, находясь в .. положении, показанном на фиг. 2, обеспечивать также и реверсивную передачу грузов меж,цу конвейерами 16 и 17.
Формула изобрет
е н и я
0
5
0
Устройство для передачи грузов, включающее расположенные под углом 15 и на разном уровне подающий и приемные рбликовые конвейеры, смонтированную на раме поворотную от привода стойку, на которой установлена плат- форма с рол1жами, и смонтированный на раме копир, отличающееся тем, что, с целью снижения энергоемкости устройства, платформа установлена на поворотной стойке свозможностью поворота в вертикальной плоскости посредством оси, связанной с последнем по ходу перемещения по платформе груза роликом и снабжена смонтированным на указанной оси бак- дажированным диском, шарнирно установленным на ее выходном участке подпружиненным упором и шарнирно закрепленной тягой с установленным с возможностью перемещения по копиру катком, при этом копир расположен по виIiтoвoй 5 линии, вьшолнен в виде охватывающего каток профиля н состоит из .двух горизонтальных на разных уровнях астков и связывающего их наклонного частка, причем один из приемных роликовых 0 конвейеров имеет неподвижный упор для взаимодействия с подпружиненным упором и дополнительный бандажирован- ный диск, связанный с первым по ходу перемещения грузов роликом посредстт 5 вом шестеренчатой передачи, и установленной с возможностью взаимодействия с бандажированным диском платформы, а ролики платформы связаны цепью.
.;, фие.г
Редактор Н. Рогулич
Составитель Б. Толчанов Техред Л.Сердюкова
Заказ 403/20
Тираж 722
ВНИИШ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
21
Корректор С. Шекмар
Подписное
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для передачи изделий с конвейера на конвейер | 1975 |
|
SU647202A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
