JИзобретение относится к транспортным устройствам для передачи грузов в двух взаимно перпендикулярных направлениях и может быть использовано в поточных линиях, в частности, для межцехового и внутрицехового контейнерного пневмотранспорта.
Целью изобретения является повышение надежности работы устройства.
На фиг. 1 изображен общий вид устройства; на фиг. 2 - то же, в плане; на фиг. 3 - положение рычажной передачи при выходе тележки с криволинейного участка пути; на фиг. 4 - то же, при воздействии заднего колеса тележки на щиток; на фиг. 5 - то же, при воздействии колеса с флажком фикса- 15 тора; на фиг. 6 - то же, при воздействии колеса на флажок упора; на фиг. 7 - то же, при воздействии колеса тележки на упор; на фиг. 8 - положение тяг и захватов при перемещении тележки за передний торец;
втором плече фиксатора 18 выполнен овальный паз 28, а к щитку 14 жестко прикреплено ребро 29, в котором закреплен палец 19 (фиг. 12). К ребру 29 прикреплен один конец пружины 20.
Поперечные тяги 6, фигурные захваты 21 и приподнятые участки 11 являются составными элементами механизма соединения тележек. Поддерживающие ролики 24, поворотные упоры 16, 17, щитки 13, 14 и под- 10 пружиненные фиксаторы являются составляющими элементами механизмов передачи тележек с ветви на ветвь.
Тележки 3 выполнены U -образными, т. е. вильчатой формы, с открытой стороной в сторону позиции перегрузки груза на роликовый конвейер 23.
Устройство для передачи грузов работает следующим образом.
На вертикально-замкнутый конвейер 2 устанавливают тележку 3 так, чтобы попена фиг. 9 - то же, при перемещении тележки 20 речная тяга 6 вошла в фигурный захват 21 за задний торец; на фиг. 10 - расположениезадней торцовой части тележки 3 (фиг. 3).
Груз 22
25
30
35
тяги относительно верхних направляющих; на фиг. 11 - разрез А-А на фиг. 1; на фиг. 12 - разрез Б-Б на фиг. 7; на фиг. 13 - разрез В-В на фиг. 7.
Устройство для передачи грузов содержит раму 1, на которой смонтирован вертикально-замкнутый конвейер 2 с неопрокидывающими съемными тележками 3, перемещающимися на колесах 4 по путям 5, имеющим прямые и наклонные направляющие.
Тележки 3 перемещаются при помощи поперечных тяг 6, закрепленных концами к тяговым приводным цепям 7 конвейера 2 перпендикулярно перемещению тележек. Тяговые цепи 7 связаны с тяговыми звездочками 8, соединенными с приводом 9, и размещены в направляющих путях 10.
Направляющие пути 5 для колес 4 тележек 3 имеют приподнятые участки 11 и окна 12, закрываемые откидывающимися щитками 13 и 14, связанными между собой рычажной передачей 15. Поворотные упоры 16, 17 закреплены на раме 1 с возможностью взаимодействия с фиксатором 18, выполненным с пазом. Шиток 14 имеет палец 19 и подпружиненные пружиной 20, прикрепленной одним концом к щитку, а вторым к раме 1.
Каждая тележка 3 снабжена спереди и сзади фигурными захватами 21, взаимодействующими попеременно с тягами 6. На позиции перегрузки груза 22 на роликовый SQ конвейер 23 и на противоположном конце рамы 1 смонтированы поддерживающие ролики 24, связанные с путями 5.
Фиксатор 18 выполнен в виде двуплечего рычага, шарнирно прикрепленного к раме 1, на коротком плече которого жестко закреп- 55 лен флажок 25 (фиг. 5).
Упор 16 снабжен флажком 26 (фиг. 6), а упор 17 - флажком 27 (фиг. 7, 12). На
40
устанавливают на роликовый конвейер 23 на левом конце вертикально- замкнутого конвейера 2 (фиг. 1).
При включении привода 9 тяговые звездочки 8 приводят в движение тяговые цепи 7 и прикрепленные к ним поперечные тяги 6. Через тягу 6 и захват 21 тележки 3 приводятся в движение на колесах 4 по путям 5.
На позицию перегрузки тележка 3 передними колесами 4 проходит по нижней ветви путей 5 через окна 12 и открытый щиток 13 и наезжает рамой тележки на поддерживающие ролики 24. В это время тяга 6 будет огибать звездочки 8 и задний конец тележки 3 начнет подниматься (фиг. 3).
Поднимаясь, колесо 4 тележки воздействует на щиток 14, который открывается и через рычажную передачу 15 закрывает окно 12 щитком 13, палец 19 щитка 14 входит в паз фиксатора 18. При выходе колес 4 на прямолинейный участок путей 5 щиток 14 остается открытым и происходит снятие груза 22 с роликового конвейера 23 (фиг. 4).
На прямолинейном участке путей 5 колесо 4 тележки 3 взаимодействует с флаж- 45 ком 25 фиксатора 18, разблокирует палец 19 щитка 14, но так как заднее колесо 4 тележки 3 находится на закрытом щитке 13, рычажная система останется в том же состоянии (фиг. 5).
При дальнейшем движении тележки второе по ходу перемещения колесо 4 взаимодействует с флажком 26 упора 16, который, поворачиваясь на оси, приподнимает фиксатор 18 и разблокирует палец 19 щитка 14. Пружина 20 возвращает рычажную систему в исходное состояние (фиг. 6).
После того, как тележка 3 выйдет на горизонтальный участок нижней ветви направляющих путей 5, она наезжает на выступающий участок 11. Правая часть тележки 3
втором плече фиксатора 18 выполнен овальный паз 28, а к щитку 14 жестко прикреплено ребро 29, в котором закреплен палец 19 (фиг. 12). К ребру 29 прикреплен один конец пружины 20.
Поперечные тяги 6, фигурные захваты 21 и приподнятые участки 11 являются составными элементами механизма соединения тележек. Поддерживающие ролики 24, поворотные упоры 16, 17, щитки 13, 14 и под- пружиненные фиксаторы являются составляющими элементами механизмов передачи тележек с ветви на ветвь.
Тележки 3 выполнены U -образными, т. е. вильчатой формы, с открытой стороной в сторону позиции перегрузки груза на роликовый конвейер 23.
Устройство для передачи грузов работает следующим образом.
На вертикально-замкнутый конвейер 2 устанавливают тележку 3 так, чтобы попеГруз 22
5
0
5
0
устанавливают на роликовый конвейер 23 на левом конце вертикально- замкнутого конвейера 2 (фиг. 1).
При включении привода 9 тяговые звездочки 8 приводят в движение тяговые цепи 7 и прикрепленные к ним поперечные тяги 6. Через тягу 6 и захват 21 тележки 3 приводятся в движение на колесах 4 по путям 5.
На позицию перегрузки тележка 3 передними колесами 4 проходит по нижней ветви путей 5 через окна 12 и открытый щиток 13 и наезжает рамой тележки на поддерживающие ролики 24. В это время тяга 6 будет огибать звездочки 8 и задний конец тележки 3 начнет подниматься (фиг. 3).
Поднимаясь, колесо 4 тележки воздействует на щиток 14, который открывается и через рычажную передачу 15 закрывает окно 12 щитком 13, палец 19 щитка 14 входит в паз фиксатора 18. При выходе колес 4 на прямолинейный участок путей 5 щиток 14 остается открытым и происходит снятие груза 22 с роликового конвейера 23 (фиг. 4).
Q
5
На прямолинейном участке путей 5 колесо 4 тележки 3 взаимодействует с флаж- 5 ком 25 фиксатора 18, разблокирует палец 19 щитка 14, но так как заднее колесо 4 тележки 3 находится на закрытом щитке 13, рычажная система останется в том же состоянии (фиг. 5).
При дальнейшем движении тележки второе по ходу перемещения колесо 4 взаимодействует с флажком 26 упора 16, который, поворачиваясь на оси, приподнимает фиксатор 18 и разблокирует палец 19 щитка 14. Пружина 20 возвращает рычажную систему в исходное состояние (фиг. 6).
После того, как тележка 3 выйдет на горизонтальный участок нижней ветви направляющих путей 5, она наезжает на выступающий участок 11. Правая часть тележки 3
поднимается, и тяга 6 выходит из зацепления с фигурным захватом 21 (фиг. 8).
В это время опустившаяся часть тележки 3 фигурным захватом 21 зацепляется за следующую тягу 6, которая начинает толкать тележку (фиг. 9). При подходе к правому поворотному участку тележка перемещается по наклонному направляющему пути 5, а затем тягой 6 выводится на горизонтальный участок верхней ветви. Далее цикл повторяется.
Устройство для передачи грузов может работать в реверсивном режиме.
При движении цепи в обратном направлении переднее колесо 4 тележки 3, взаимодействуя с флажком 25 фиксатора 18 и флажком 26 упора 16, не воздействует на рычажную систему (фиг. 6). Наезжая на щиток 13, колесо 4 тележки 3 закрывает его и через рычаг 15 открывает щиток 14, фиксатор 18 блокирует палец 19.
В это время тяга 6 будет огибать тяговые звездочки 8 и задний конец тележки начнет опускаться. Колеса 4 тележки 3 свободно проходят под щитком 14. Опускаясь, колесо 4 взаимодействует с флажком 27 упора 17 (фиг. 7). Происходит разблокировка пальца 19, и рычажная система приходит в исходное состояние.
Формула изобретения
Устройство для передачи грузов, включающее позицию перегрузки и вертикально0
замкнутый конвейер с неопрокндыг- о;,аши- ся тележками вильчатой формы, с приводными цепями, с механизмом соединения те лежек с приводными цепями, с прямыми и наклонными направляющими для колес то- лежек, закрепленными на раме с окнами и с механизмами передачи тележек с ветви на ветвь, отличающееся тем, ч;о, с целью повышения надежности работы устройства, механизм соединения тепежек с приводными цепями выполнен в виде закрепленных на последних поперечных тяг, расположенных на передних и задних торцах тележек с возможностью попеременного зацепления с поперечными тягами фигурных захватов и при5 поднятых участков, выполненных на прямых направляющих, а каждый механизм передачи тележек с ветви на ветвь выполнен в виде установленных на наклонных направляющих с возможностью взаимодействия с нижней частью тележек поддерживающих
0 роликов, смонтированных на раме с возможностью взаимодействия с тележками поворотных упоров, шарнирно установленных на раме с возможностью перекрытия окон щитков, связанных межлл собой и с поворотными упорами м O,VH из которых имеет палец, и подпоужиненного фиксатора с фигурным пазом для размещения пальца щитка, причем поворотные поры и подпружиненный фиксатор имеют флажки, установленные с возможностью взаимодействия с колесами тележки.
ь

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выгрузки штучного груза из транспортных средств | 1983 |
|
SU1094823A1 |
| Тележечный конвейер | 1982 |
|
SU1022882A1 |
| Вертикально-замкнутый тележечный конвейер | 1986 |
|
SU1364565A1 |
| Цепной тележечный конвейер | 1977 |
|
SU745812A1 |
| Подвесной конвейер | 1979 |
|
SU816881A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| АРТИЛЛЕРИЙСКАЯ КОРАБЕЛЬНАЯ УСТАНОВКА | 2012 |
|
RU2533947C2 |
| УСТРОЙСТВО для НАВЕШИВАНИЯ И СЪЕЛи ПРИКРЕПЛЕННБ1Х К ТРАВЕРСЕ ГРУЗОВ С КРЮКОВ ГРУЗОВЫХ ТЕЛЕЖЕК НОДВЕСНОГО ТОЛКАЮЩЕГОКОНВЕЙЕРА | 1965 |
|
SU173137A1 |
| Устройство для перегрузки грузов на приемные конвейеры | 1988 |
|
SU1655874A1 |
| Тележечный конвейер | 1980 |
|
SU939343A1 |



Изобретение относится к транспортным устройствам и позволяет повысить надежность работы устройства. Устройство включает позицию перегрузки и вертикально- замкнутый конвейер. Последний состоит из тележек (Т) 3 вильчатой формы, тяговых цепей, механизма соединения Т 3 с приводными цепями, прямых и наклонных направляющих для колес Т 3, закрепленных на раме i и выполненных с окнами и механизмом передачи Т 3 с ветви на ветвь. Последний выполнен в виде установленных на наклонных направляющих и взаимодействующих с нижней частью Т 3 поддерживающих роликов 24, смонтированных на раме 1 и взаимодействующих с Т 3 поворотных упоров, установленных на раме 1 и перекрывающих окна щитков и подпружиненного фиксатора. Шитки связаны между собой и с поворотными упорами и один из них имеет палец, размещенный в фигурном пазу фиксатора. Поворотные упоры и фиксатор имеют флажки, взаимодействующие с колесами Т 3. Механизм соединения Т 3 с приводными цепями выполнен в виде закрепленных на последних поперечных тяг (ПТ) 6, расположенных на передних и задних торцах Т 3 фигурных захватов 21 и выполненных на прямых направляющих приподнятых участков (ПУ) П, На направляющие устанавливают Т 3, которые ПТ 6 захватываются за захваты 21 задней торцовой части. На позиции перегрузки Т 3 совершает подъем и съем груза, переходя через механизм передачи Т 3 с ветви на ветвь. Перемещаясь по верхним прямым направляющим, Т 3 наезжает на ПУ 1 1 и ПТ 6 выходит из зацепления с захватом 21. а следующая ПТ 6 входит в захват 21 задней части Т 3. На нижних прямых направляющих перехват Т 3 осуществляется ПТ 6 и ПУ 1 1. 13 ил. «D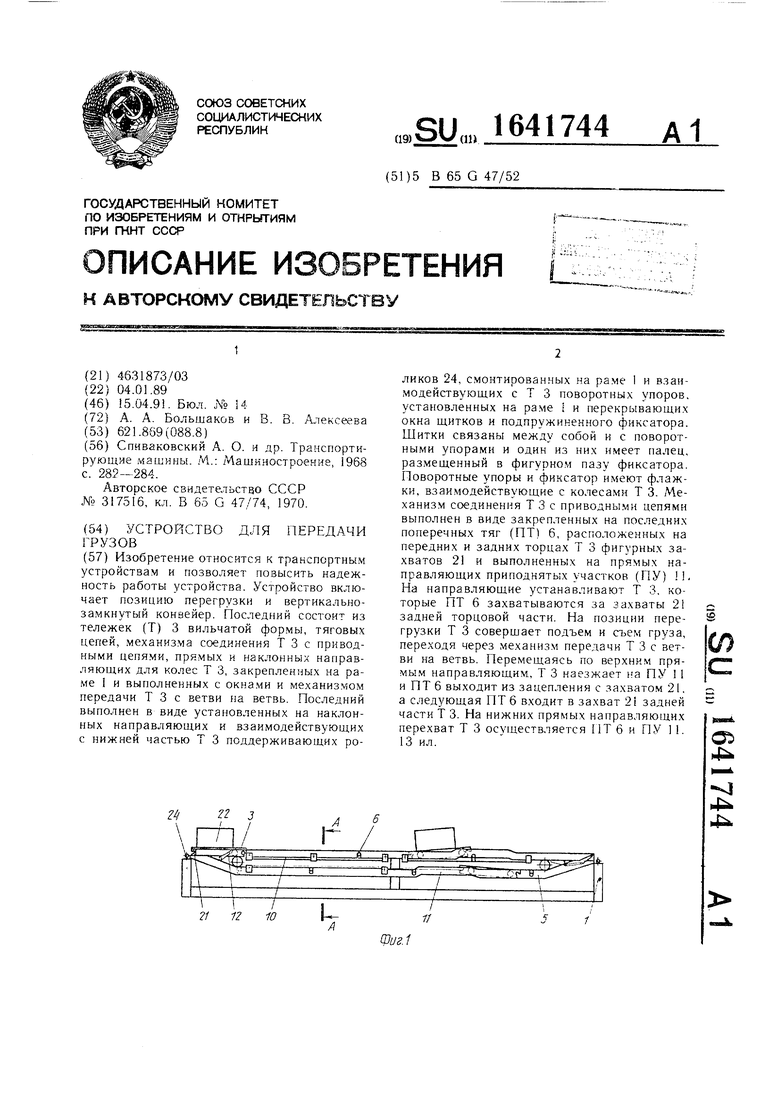
фиг. 2
j .З
Ф(12М
Фиг 5
13
Фаг.6
фиг.7
Фиг. 9
6-6
Фиг.П
Фиг ю А-А
®U2.11
8-8
-26
Фиг. 13
| Спиваковский А | |||
| О | |||
| и др | |||
| Транспортирующие машины | |||
| М.: Машиностроение, 1968 с | |||
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1916 |
|
SU282A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ КИРПИЧА-СЬЕРЦА НА РАМКИ К АВТОМАТУ-УКЛАДЧИКУ КИРПИЧА | 0 |
|
SU317516A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
