1
Изобретение относится к области медицины, а именно к механотерапии.
Известно устройство для восстановления двигательных функций нижних конечностей, содержащее основание, электропривод, элементы крепления больного и иодстопник с системой крепления стоп 1.
Однако известное устройство позволяет обучить больного ходить, когда двигательные функции нижних конечностей утрачены частично.
Целью изобретения является обучение ходьбе больных с полной неиодвижностью нижних конечностей и регулирование длины, высоты шага и положения стоп.
Поставленная цель достигается тем, что электропривод оснащен барабаном с натяжным шкивом и тросом, на котором неподвижно закреплены два сухаря, на основании подвижно установлены механизмы принудительного движения стоп, выполнеиные в виде жестких кориусов, внутри которых установлены кронштейны со щупами и взаимно подвижные штоки с фиксаторами, причем на корпусах закреплены микронереключатели реверса электропривода, подстопники шарнирно установлены иа штоках, а на основании закреплены плоские копиры с пазами, в которых расиоложены щуиы и нодвижиый и неподвижный упоры.
Кроме того, на сухарях и штоках установлены контактные ролики.
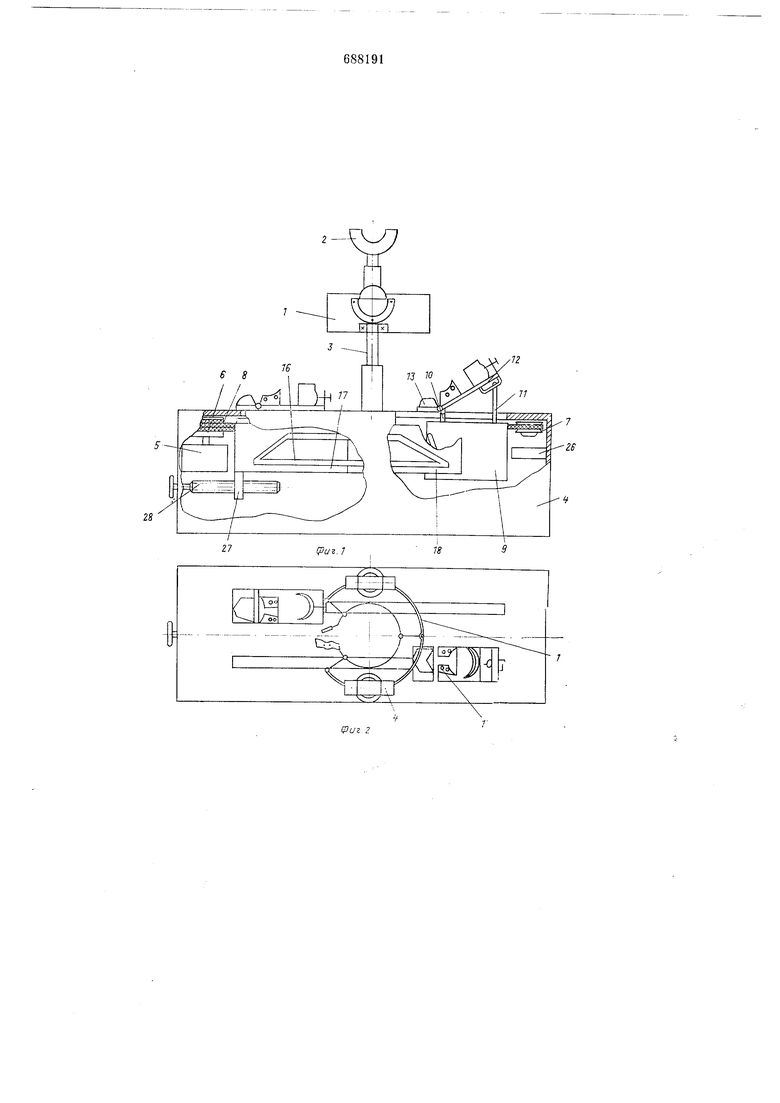
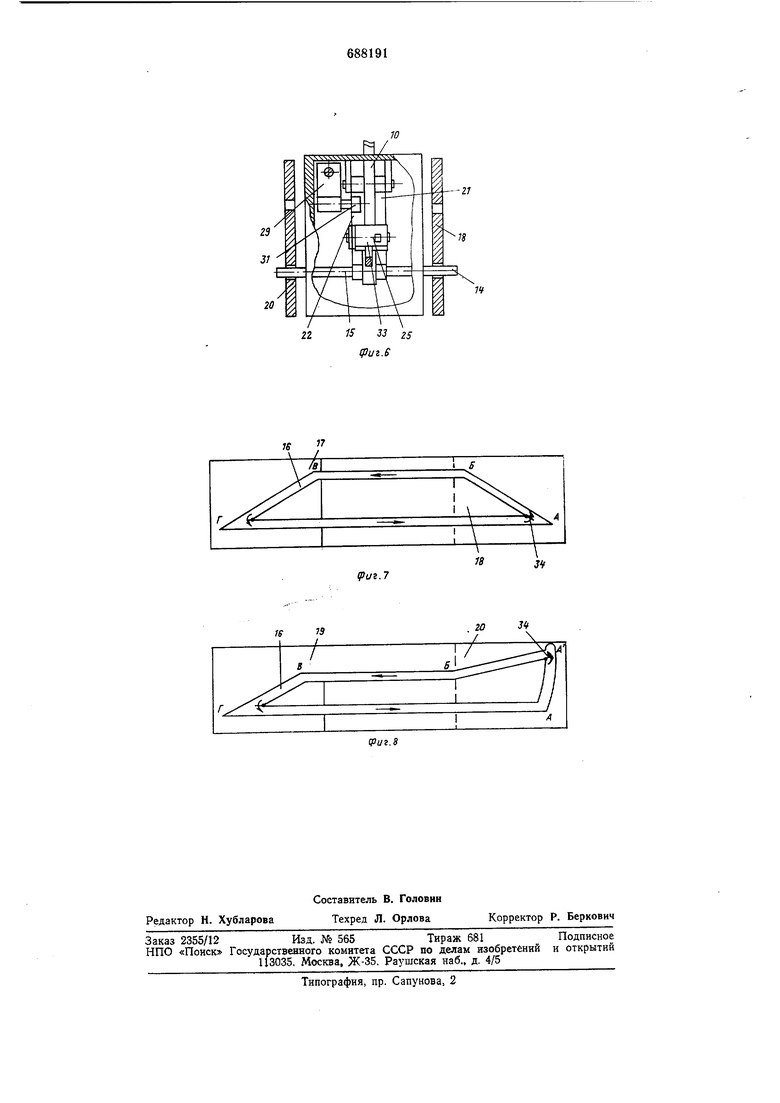
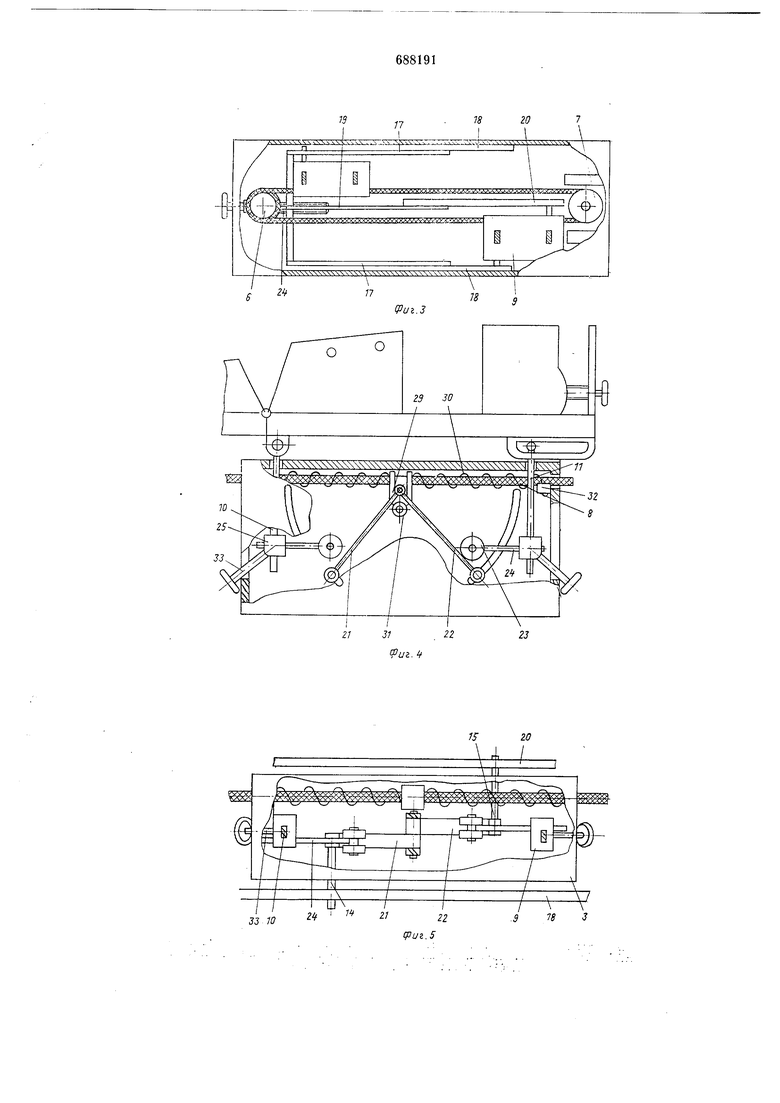
На фиг. 1 изображено иредлагаемое устройство для восстановления двигательных функций конечностей, общий вид с частичным разрезом; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, вид сверху с частичными разрезами; на фиг. 4 - механнзм иринудительного стоп, вид сбоку; на фиг. 5 - то же, вид сверху; на фиг. 6 - то же, вид сиереди; иа фиг. 7 - одии из копиров во фронтальной нроекции; на фиг. 8 - второй коиир во фронтальной проекции.
Устройство для восстановления двигательных функций нижних конечностей содержит систему 1 крепления больного с иодмышечными упорами 2, устаиовленную посредством телескопических стоек 3 на основании 4, электропривод 5, оснащенный барабаном 6 с натяжным шкивом 7 и тросом 8. Па основании 4 подвижно установлены механизмы 9 принудительиого движения стоп, в которых на штоках 10 и II шарнирно закреплены иодстопники 12 с системой 13 крепления стоп, щупы 14 и 15, имеющие возможность иеремещаться в пазах 16 плоских копиров 17 - 20. Щупы 14 и 15 жестко укреилеиы на соответствующих кроиштейнах 21 и 22, с которыми через
контактные ролики 23 и штоки 24 связаны носредством ползунов 25 соответствующие штоки 10 и 11, управляюш,ие положением подстопников 12.
Продольное перемеш,ение механизмов 9 с одной (задней по отношению к больному) стороны ограничено неподвижным упором 26, а с другой (передней) стороны - подвижным упором 27, перемещаемыми посредством вннта 28. Положение нереднего подвижного уиора 27 определяет длину шага и может быть изменено по усмотрению врача н данным больного. С подвижным упором 27 жестко связаны подвнжные части копиров 17 н 19; неподвижные части копиров 18, 20 жестко связаны с пеподвил пым упором 26.
Движение па механизмы 9, управляющие положением подстопников 12, передается с троса 8 жестко закрепленными на нем сухарями 29 посредством пружин 30, установленных на тросе 8 между сухарями 29 и механизмом 9. С сухарем 29 жестко связан ролик 31, который при перемещении сухаря 29 относнтельно корпуса механизма 9 в заднем направлении (по отпошению к положению больного) воздействует на кронштейн 22, перемещая его таким образом, что шток 11 выдвигается вверх. Микронереключатель 32 служит для реверсирования электронривода 5.
Высота иодъема стоны (высота щага) определяется положением ролика 23 штока 24 относительно штоков 10 и И и может быть изменена но усмотрению врача и данным больного. Изменение этого положения осуществляется посредством рукоятки 33, служащей одновременно для взаимного стопорения штоков 24, 10 и 11. Пружинные скалки 34 имеют возможность одностороннего поворота (по стрелке, как показано на фиг. 7), и установленные в местах новорота фигурных пазов 16 копиров 17-20 они обеспечивают безошибочное перемещение (по стрелке, как показано на фиг. 7) щунов 15 и 14 в пазах 16 соответствующих копиров.
Устройство используется следующим образом.
Учитывая данные и состояние больного, на устройстве посредством винта 28 устанавливается подвижный упор 27 (ширина шага) и взаимное положение штоков 24, 10 и 24, И посредством рукоятки 33 (высота шага и положение стопы в процессе шагания). После установки ширины и высоты шага стопы больного закренляются на подстоиниках 12 и фиксируются с помощью системы 13 крепления стоп. .Корпус тела больного закрепляется посредством системы 1 крепления, а подмышки опираются на подмышечные упоры 4. Устанавлнвается необходимая скорость перемещения стоп и производится включение устройства. При этом электропривод 5 начинает враи1,ать барабан 6, который перемешает трос 8, натянутый между барабаном 6 и натяжным шкивом 7. Движение троса 8 через сухари 29, жестко укрепленные на тросе 8, и пружины 30, передается на механизмы 9 принудительного движения стоп с укрепленными на них подстопппками 12.
Допустим, лсв1,1й механизм 9 вместе со стопой движется пазад, а правый механизм 9 двпжется вперед (см. фиг. 7, 8). При этом шуп 14 правого механизма 9 движется по верхнему пазу 16 копира 17 (участок В-Г), а щуп 15 этого же узла перемещается по верхнему назу 16 копира 19 (участок В-Г), щупы же 14 и 15 левого узла управления перемещаются по нижним пазам соответствующих копиров 18 и 20 (участок Г-А). Правый подстопник 12 несколько поднят над основанием 4 устройства, поскольку щупы 14, 15, находясь в пазу 16 на участках В-Г копиров 17 и 19, приподнимают штоки 10 и 11 посредством соответствующих кронщтейнов 21, 22, роликов 23, штоков 24 и ползунов 25, а левый подстопник 12 лежит на основании 4. В момент достижения правым механизмом 9 подвижного упора 27 (конец щага - точка Г копиров 17, 19) и левым механизмом 9 неподвижпого упора 26 (начало шага - точка А копиров 18, 20) правый подстопник 12 ложится на плоскость основания 4, щупы 14, 15 правого механизма 9 достигают точек Г копиров 17, 19, а щупы 14, 15 левого мехапизма 9 достигают точек А копиров 18, 20. При дальнейшем движении троса 8 сухари 29 начинают сжимать пружины 30 (переднюю у нравого механизма 9 и заднюю у левого механизма 9).
Сами узлы обеих стоп при достижении упоров 26 и 27 останавливаются. Ролик 31, связанный с сухарем 29, при его перемещепии назад относительно механизма 9 (левой стопы) начинает воздействовать на кронштейн 22, поворачивая его, а вместе с ним через ролик 23 шток 24 и ползун 25 поднимает шток И. При этом пяточная часть подстопника 12 поднимается, а щуп 15 перемещается по участку фигурного паза А-А копира 20, пальцы стопы сгибаются. При достижении щупом 15 верхней точки А копира 20 срабатывает микропереключатель 32, осуществляя реверс электропривода 5. Сухарь 29 правого механизма 9 начинает перемещаться назад, а сухарь 29 левого механизма 9 - вперед. Оба механизма 9 принудительного движения стоп до полного разжатия нружин 30 остаются ненодвижными. Ролик 31 освобождает кронштейн 22, но он не опускается, поскольку щуп 15, попав в точку А копира 20, проскакивает пружинную скалку 34, которая пропускает щуп только в направлении от точки А к точке А . Щуп 14 левого механизма 9, находясь в точке А копира 18, из-за наличия пружинной скалки 34 также не мпжет вернуться в точку Г по участку паза 16 А-Г. Аналогично действуют пружинные скалки 34 на щупы 14, 15, находящиеся в точках Г копиров 17, 19 правого механизма 9. После полного разжатия пружин 30 правый механизм 9 начинает перемещаться назад, а левый - вперед. Щуны 14, 15 правого механизма 9 перемещаются по назам копиров 17-20, а щупы 14, 15 левого механизма 9 перемещаются по пазам 16 (А-Б-В-Г) копиров 17, 18 и (А-Б- В-Г) копира 19, 20 соответственно. При этом щток 10 левого подстопннка 12 постепенно поднимается, отрывая носок нодстопника 12 от основания 4, разгибая нальцы стопы больного, а щток 11 этого же подстопннка 12 постепенно опускается, меняя пространственное положение стопы. Такие эволюции стопы соверщаются на участках А-Б и А-Б коииров 18 и 20 перемещения щупов 14 и 15 левого механизма 9. При подходе к точке Б стопа, приподнятая над основанием 4, занимает горизонтальное или наклонное положение (согласно данных больного и усмотрения врача и поступательно перемещается в таком положении на участках Б-В до точек В копиров 17, 18 н 19, 20. На участках В-Г копиров 17 и 19 щупы 14, 15 левого механизма 9, двигаясь по пазам 16 копиров 17, 19 к точке Г, постепенно совмещают нодстонник с основанием 4. Правая стопа, двигаясь назад, не отрывается от плоскости основания. Щупы 14, 15 равого механизма 9 перемещаются по участку Г фигурных назов 16 копиров 17- 20. При дис1иленин подвижного унора 27 левым механизмом 9 н неподвижного упора 26 правым механизмом 9 последние останавливаются. Сухгоь 29 правого механизма 9, продолжая двига-лся назад, сжимает пружину 30, а ролик 31, жестко связанный с сухарем 29, прн перемещении назад относительно механизма 9 ловорачнвает кронщТСЙГ1 22 н поднимает игюк 11. При этом пяточная часть правого иодстон1ннча 12 поднимается, а щуп 15 механизма 9 перемещается но участку А-А фигурного паза копира 20, пальцы ног сгибаются. При достн женин щупами 15 верхней точки А копира 20 срабатывает микропереключатель 32 осуществляя реверс электронрпвода 5. Производится следующий щаг. Таким образом, устройство позволяет осуществлять обучение больных с иолной неподвижностью нижних конечностей с регулировкой длины, высоты щага и положения стоп. Формула н 3 о б р е т е н и я 1.Устройство для восстановлетщя двигательных функций нижних конечностей, содержащее основание, электропрнвод, элементы креплення больного, и подстопннкп с системой креплення стоп, отличающееся тем, что, с целью обучетитя ходьбе больных с полной неподвижностью конечностей и возможностн регулировання длнны, высоты щага и полол ения стон, электропрнвод оснащен барабаном с натяжным щкивом и тросом, на котором ненодвнжно закреплены два сухаря, на основании подвпжно установлены механизмы прниуднтельиого движения стоп, выполненные в виде жестких корпусов, внутрт которых установлены кронщтейны со щунами и взаимно подвижные щтоки с фиксаторами, причем на корпусах закреплены микроиереключателн реверса электропривода, подстонннки щарнирно установлены на щтоках, а на основании закреплены плоские копиры с пазами, в которых расположены щуны и подвижный н неподвнжный упоры. 2.Устройство по ц. 1, отличающееся тем, что на сухарях н щтоках установлены контактные ролики. Источннкн ннформацин, принятые во вннмание прн экспертизе 1. Патент США № 3605732, кл. 128-25В, онублик. 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Ортопедическое устройство | 1983 |
|
SU1120999A1 |
| Плавающая игрушка | 1986 |
|
SU1395352A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ РАЗМЕРОВ БАЛЛОНОВ ЭЛЕКТРОННОЛУЧЕВЫХ ТРУБОК | 1971 |
|
SU296173A1 |
| Станок для растяжки сотового заполнителя | 1986 |
|
SU1433601A1 |
| Устройство для резки профильного проката | 1981 |
|
SU967708A1 |
| Машина ударно-вращательного действия | 1985 |
|
SU1252484A2 |
| Устройство для механотерапии конечностей | 1986 |
|
SU1380748A1 |
| Устройство для разработки движений в суставах кисти и пальцев рук | 1986 |
|
SU1410976A1 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ БОРТОВЫХ КОЛЕЦ | 1970 |
|
SU258572A1 |
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2005 |
|
RU2307638C2 |
.
.
2 -
20
игЛ
75
IS
t
га J« /
/
Составитель В. Головни
Редактор Н. Хубларова Техред Л. Орлова
Заказ 2355/12Изд. № 565Тираж 681Подписное
НПО «Поиск Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Типография, пр. Сапунова, 2
Корректор Р. Беркович
Г
it
x,vy ya fy y:C-d
IB
