ляется то, что шариковые элементы жестко закреплены на тяге, в результате чего при перемещении шариковых элементов внутри трубопровода возникает трение скольжения, что приводит к повышенному износу трушихся поверхностей и самой тяги. Кроме того, для передачи усилия в направлении к толкателю, связанному с исполнительным механизмом, в качестве кинематической связи между толкателями используется жидкое масло, что требует выполнения толкателей в виде поршней с штоками, перемеш,ающихся в гидроцилиндрах. Конструктивное оформление такого решения довольно сложное, а наличие масла в системе опасно тем, что оно может попасть через уплотнительные устройства в зону исполнительного механизма или аппарата, а это зачастую недопустимо, так как попадание масла в аппарат может привести, например, к загрязнению продукта.
Целью изобретения является упрощение конструкции.
Эта цель достигается тем, что тяга выполнена в виде гибкой упругой ленты, а шариковые элементы расположены с двух сторон ленты.
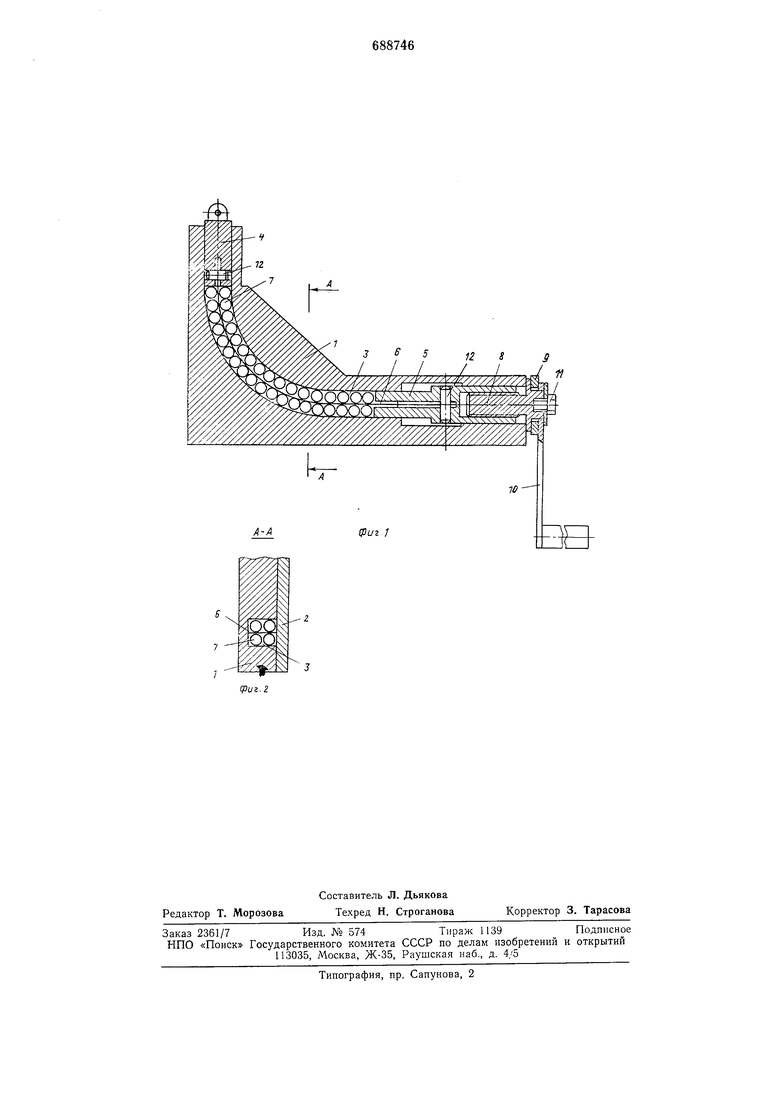
На фиг. 1 изображено устройство, обший вид в разрезе; на фиг. 2 - разрез А-А на фиг. 1.
Устройство для дистанционной передачи возвратно-поступательного движения состоит из корпуса 1 с закрепленной на нем крышкой 2 и с расположенным в корпусе трубопроводом 3, например, прямоугольного сечения. В трубопроводе 3 размешены толкатели 4 и 5, имеющие также прямоугольное сечение и соединенные между собой тягой 6, выполненной в виде гибкой упругой ленты преимущественно из стали. С обеих сторон тяги 6 расположено по два ряда стальных шариковых элементов 7. Толкатель 5 имеет резьбовое отверстие, куда входит винт 8, удерживаемый от осевого перемешения буртиком и заглушкой 9. Винт 8 непосредственно связан с приводным механизмом 10, закрепленным болтом 11. Тяга 6 крепится в толкателях 4 и 5 с помощью штифтов 12.
Устройство работает следующим образом.
При вращении приводного механизма 10 против часовой стрелки толкатель 5, свинчиваясь с винта 8, перемещается влево по трубопроводу 3 и передает усилие на шариковые элементы 7, которые, перекатываясь вверх, передают поочередно усилие толкателю 4. Толкатель 4, связанный с какимлибо исполнительным механизмом, например клапаном (на чертежах не показан), также поднимается, открывает клапан и одновременно увлекает за собой тягу 6. При врашении приводного механизма 10 по часовой стрелке толкатель 5, навинчиваясь на винт 8, перемещается вправо и тянет за собой тягу 6, а та тянет толкатель 4 вниз, происходит закрытие клапана, при этом шариковые элементы 7 свободно скатываются вниз по наклонному участку трубопровода 3.
Формула изобретения
Устройство для дистанционной передачи возвратно-поступательного движения, содержащее корпус с расположенным в нем трубопроводом, толкатели, размещенные в трубопроводе, тягу, связывающую между собой толкатели, шариковые элементы, установленные в трубопроводе, и приводной
механизм толкателей, отличающееся тем, что, с целью упрощения конструкции, тяга выполнена в виде гибкой упругой. ленты, а шариковые элементы расположены с двух сторон ленты.
Источники информации,
принятые во внимание при экспертизе
1.Кожевников С. Н. и др. Механизмы. М., «Машиностроение, 1976, с. 309, р. 4.94.
2.Авторское свидетельство СССР № 338716, кл. F 16Н 21/08, 1969 (прототип).
А

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической сборки составных частей химических источников тока | 1991 |
|
SU1790016A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОЙ ПЕРЕДАЧИ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 1972 |
|
SU338716A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Устройство для передачи поступательного движения по криволинейной траектории | 1979 |
|
SU947541A1 |
| ЗАПИРАЮЩИЕ УСТРОЙСТВА ДЛЯ АВТОМОБИЛЬНЫХ ДВЕРЕЙ ИЛИ ДРУГИХ ЗАПОРНЫХ ЭЛЕМЕНТОВ | 1997 |
|
RU2194837C2 |
| ГИБКИЙ ПРИВОД ДЛЯ МОЛОКООТСОСА | 2010 |
|
RU2547077C2 |
| Передаточный механизм | 1983 |
|
SU1116249A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОЙ ПЕРЕДАЧИ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 1968 |
|
SU206967A1 |
| ПРИВОД ДВИГАТЕЛЬНЫЙ МАЛОГАБАРИТНЫЙ | 2017 |
|
RU2675288C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |