(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МЕСТНОСТИ ПО СТЕРЕОПАРЕ АЭРОСНИМКОВ
тельного рельефа местности. При этом происходит накопление ошибок, возникающих при корреляционном сравмёнии вариантой рельефа в заданной окрестности восстанавливаемой точки. Ошибки возникают, в основном, по двум причинам: из-за линеари ации рельефа в рассматриваемой окрестности и в результате амплитудных искажений, нарушающих равенство сигналов в соответственных точках снимков.
Линеаризация снижает точность восстановления рельефа, есЛи последНИИ в действительности изменчив в пределах рассматриваемой окрестности точки рельефа. Эти погрешности сншга ются при сокращении размеров задаваемой окрестности, однако при этом уменьшаются коррелируемые участки и возрастает влияние случайных амплитудных искажений сигналов. Взаимная корреляция сигналов стайовится малопригодной для оценки сходства сигналов, йЬторые подвеЁ)жены неоднородным амплитудным искадениям При неоднородных искажениях пропорциональность между сигналами в с&ответстйенных точках снимков может меняться от точки к точке в. широких пределах. В результате при работе последовательных устройств наблюдаются большие отклонения и даже отывы восстановленного пооЛиля рельефа от существующего в действительности. .
Целью изобретения является повышение точ:ности и помехоустойчивости восстановления рельефа местности по стереопарам аэроснимков, .
Это достигается тем, в устройство для автоматического восстановления рельефа -местности по стереопаре аэроснимков , содержащее блок управления устройством, один выход которого через блок управления сканированием подключен к входам фотоэлектрических преобразователей снимков, а другой выхйд - ко вторым входам фотоэлектрических преобразователей снимков, выводы которых подключены к блоку оперативной памяти для снимков в цифровой форме, вводятся блок управления восстановлением, профиля, блок адресации точек, блок вычисления разностных сигналов, блок временного запоминания минимальных рассогласований, блок вьгаисления рассогласований сигналов, блок определения ю нимального рассогласования, блок накоплений минимальных рассогласований, блок запоминания локально-оптимальных продолжений профиля, блок определения минимального окончательного рассох-ласования и блок восстановления профиля, причем выход блока управления-восстановлением профиля через блок адресации точек подключен к блоку оперативной памяти для снимков в цифровой форме, выход которого через блок вычисления разностных сигналов подключен к входу блока вычисления рассогласований сигналов, выход которого через блок определения минимального рассогласования, блок накопления минимальных рассогласований и блок временного запоминания минимальных рассогласований соединен со BTOpfciM входом блока вычисления рассогласований сигналов, второй выход блока управления восстановлением профиля подключен к блоку 1 вычисления рассогласований сигналов и к блоку временного запоминания минимальных рассогласований, а чере блок определения минимального рассогласования - к блоку запоминания
лок ально-оптималь ных продолжений профиля, а третий выход блока управления восстановлением профиля подключен к входу блока определения минимального окончательного рассогла. сования, а через блок накопления минимальных рассогласований - ко второму входу блока определения минимального окончательного рассогласования, выход которого через блок восстановления профиля и блок запоминания локально-оптимальных продолжений профиля подключен ко второму входу блока восстановления профиля, выход которого соединен с блоком управления восстановлением профиля и блоком управления устройства.
Как и в прототипе, в устройстве снимки стереопары сканируются по сетке эпиполярных линий и преобразуются в дискретные цифровые сигналы. В отличие (DT прототипа, в уст-, ройстве каждый очередной восстанавливаемый эпйполярный профиль рельефа восстанавливается одновременно по всему сечению рельефа, причем при восстановлении (1) упорядоченным сокращенные способом перебираются все допустимые из физических
.соображений варианты рельефа наблюдаемой местности и J2 учитываются допустимее неоднородные амплитудные искажения сигналов в соответственных точках снимков, такие, что приращения сигналов в соседних соответственных точках вдоль соответственных эпиполярных линий сканирования снимков пропорциональны одно другому с точностью до однородных случайных помех, и коэффициенты пропорциональности изменяются произвольным образом в заданном интервале значений.
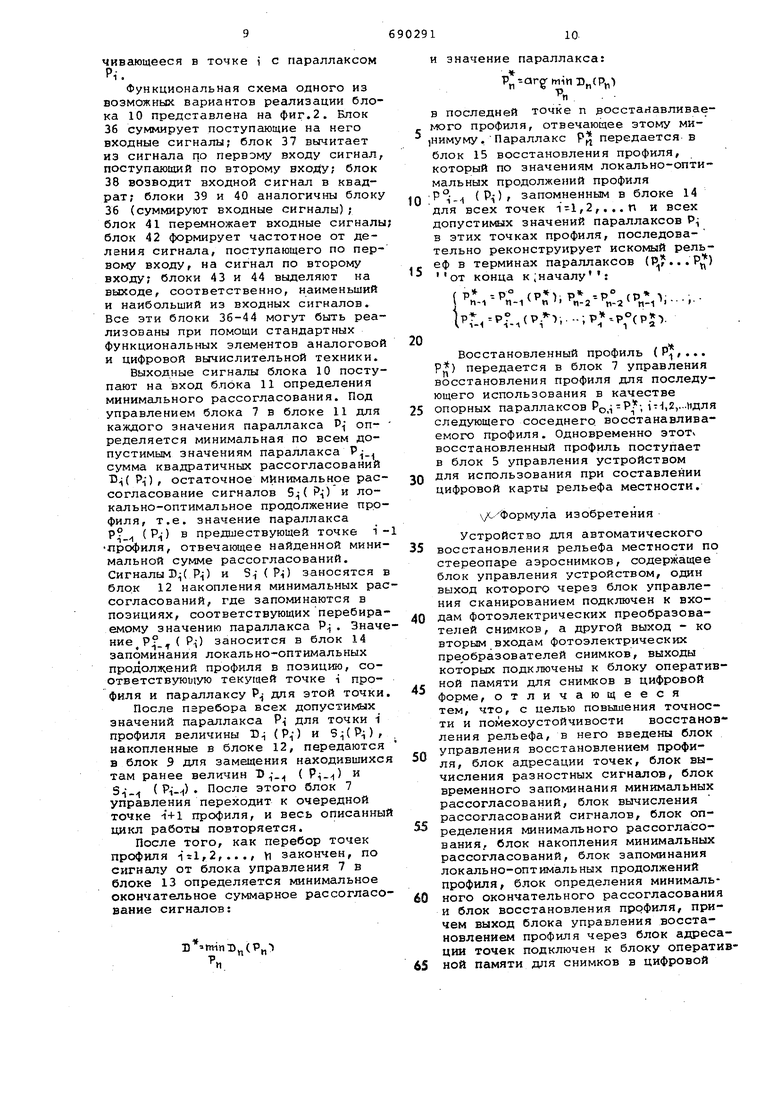
Блок-схема устройства приведена на фиг. 1 и 2, Устройство содержит фотоэлектрический преобразователь 1
первого снимка, фотоэлектрический преобразователь 2 второго снимка, блок 3 управления сканированием, блок 4 оперативной памяти для снимков в цифровой форме 4, блок 5 управления устройством, блок 6 адресации точек, блок 7 управления восстановлением профиля, блок 8 вычисления разностных сигналов, блок 9 временного запоминания минимальных рассогласований, блок 10 вычисления рассогласований сигналов, блок 11 определения минимального рассогласования, блок 12 накопления минимальных рассогласований, блок 13 определения минимального окончательного рассогласования, блок 14 запоминания локально-оптимальных продолжений профиля , блок 15 восстановления Профиля (параллаксов).
Блок 5 управления устройством через блок 3 управления сканированием подключен к блокам фотоэлектрических Преобразователей 1 и 2. Другим выходом блок 5 соединен со вторьлми входами блоков преобразователей 1 и 2, выход которых подключен к входам блока 4 оперативной памяти для снимков в цифровой форме. Блок 7 управления восстановлением профиля связан шинами 16 с блоком 6 адресации точек, шинами 17 - с блоком 9 временного запоминания минимальных рассогласований, шинами 18 - С блоком 10 вычисления рассогласований сигналов, шинами 19 - с блоком 11 определения минимального рассогласования сигналов, шинами 20 - с блоком 12 накопления минимальных рассогласований и шинами 21 - с блоком 13 определения минимального окончательного рассогласования Блок 6 адресации точек шинами 22 связан с блоком 4 оперативной для снимков в цифровой форме. Последний шинами 23 .связан с блоком 8 вычисления разностных сигналов, который шинами 24 соединен с блоком 10 вычисления рассогласований сигналов. Блок 10 шинами 25 связан с блоком 9 временного запоминания минимальных рассогласований и шинами 26 - с блоком. 11 определения минимального рассогласования. Блок 11 шинами 27 связан с блоком 14.запоминания локально-оптимальных продолжений профиля и шинами 28 - с блоком 12 накопления минимальных рассогласований. Последний шинами 29 связан с блоком 9 временного запоминания минимальных рассогласований и шинами 30 с блоком 13 определения минимального окончательного рассогласования. Шинами 31 блок 13 связан с блоком восстановления профиля 15. Блок 15 входными и выходными шинами 32 и 33 связан с блоком 14 запоминания локально-оптимальных продолжений
профиля и по шинам 34 и 35 подключен к блоку 7 управления восстановлением профиля и блоку 5 управленияустройством.
При описании работы использованы следующие обозначения: i 1,2,.. ti- цифровая координата точки эпиполярного профиля рельефа и одновременно цифровая координата соответственной точки первого снимка стереопары, изобрс1жаквдей эту точ0ку профиля; ,- ,...o,d,--- л приращения целочисленных параллаксов, отвечаквдие допустимым изменениям высоты точки восстанавливаемого профиля по отношению к соседнему
5 эпиполярному профилю рельефа; i граница допустимых изменений параллаксов в одноименных точках сосед-г них профилей рельефа () ; РО,опорные целочисленные продольные
0 параллаксы соответственных точек снимков, отвечающие восстановленным высотам точек соседнего профиля Р|-Рд йР - целочисленные продольные параллаксы соответственных точек
5 снимков, отвечающие допусти№лм высотам точек восстанавливаемого профиля;
и (,(%- сигнал для снимка в цифровой форме в точке, лежащей на рассмат0риваемой эпиполярной линии сканирования первого снимка; NW(i-P,-) - аналогичный сигнал для соответственной точки второго снимка;
AV(i,i--( )-V(i)- N( i - 1) - прираще5ние сигнала в соседних точках вдоль эпиполярной линии сканирования первого снимка;
UNW( 1 - PV, iH -Р,- , ) NW ( 1 - Р,-) - { i - Н-Р,- приращение сигнала в точках втброго
0 снимка, соответственных точкам i , -{ w| на первом снимке в случае, если локальное продолжение рельефа между точками Ни i- 1 профиля характеризуется параллаксами ,
5 в этих точках; .(Р.;) - остаточное минимальное рассогласование между сигналами на обоих снимках стереопары в случае, когда высота в 1-й точке профиля
0 характеризуется параллаксом ; 1 (Р) - частная сумма квадратичных минимальных рассогласований между снимков для локально-оптимального варианта профиля рельефа для то5чек 1,2,1,характеризующегося в
точке i паргшлаксом ; g, (Pi-,Pi-iTi) локальное рассогласование между сигналами, соответствующее локальному продрлжению рельефа между точками i и i-1, характери0зующимися параллаксами Р , сг-СР- Р irO-S- СР- 1-1)%l 1 1-1 ll . т -TiUV((l-P,lM-P..13)
TJ- коэффициент, задающий допустимые
5
Неоднородные амплитудные искажения сигналов в соответственных TOUKetx снимков и принимающий произвольные значения в непрерывном ограниченном интервале Ti « Tmati - « известными допустимыми границами и 0,5 d, ( , Р ) - минимальное квадратичное -рассогласование между сигналами снимкрв для соседних точек про,филя 1, 1-1, характеризукяцюсся параллаксами р,- , PI г по всем допустиМЫМ амплитудным искажениям сигналов
VPi.P.,fciv.p.,yf(p.,R..)a,
S
«tnin(r- fp- р- . «- 1.1 i-nTi
i . .. .
где
,,„ „ , ),b,, Т,-(Р,Р,ц) и«.;п.еслмг..„
tttin
.Tmm.. ,««
o V/P,.4bV(,i-V) 1 iVCi,i-11 лх«Ci-Pi,i-i-P,.i 1
или
оесли Tmin Tf-tTmoix
Fmiti T, miv,.
i,-.Vl iff .. f .
P°-( P) - локально-оптимальное продолжение рельефа от точки IK точке 1-1 профиля (в терминах ч. .параллаксов соответственных точек снимков в случае; чэсли точка i njpoфиля характеризуется параллаксом PI
Р° (P Vdrgrm-inCt),. /Pi-.,P.13,
; -1 ., ,: . , ,
где минимум берется rib всем дорУстимым продолжени дал рельефа/ заканчивающимся в точкеi, характеризуемой параллак ;ом из условий физической осущес- бимости профиля параллаксы PI д4я допустимых пподолжений ограничейы условием:.
..:..:. ...../
где cTttioi О - заданная граница допустимых изменений параллакса для соседних точек профиля.
В этих обозйачёйиях сббтнсиёнйя, связывающие величины рассогласова нйясйгиалов, записываются как.
1 р;В..СрД(р.1,бДР,т.,,ср.и;.
.P..--3rvlRi.Pi ОснЬвной особенностью устройства является то, что вместо последовательных определений макримальной взаимной корелляции между сигналами снимков при нескольких допустимых вариантах рельефа в окрестности каждой восстанавливаемой точки, в нем е определяется суммарное минимальное квадратичное рассогласование между сигналами снимков сразу для всех точек восстанавливаемого эпиполярного профиля по всем допустимым ,ваQ риантам такого профиля, ограниченным только условиями физической осуществимости:
(P,....p;i.qrgrm.M ,(P,,p..,i.
Искомый профиль рельефа в терялинах параллаксов (Р,... ) восстанавливается в устройстве при помощи блокоп, аппаратурно реализующих
0 процесс минимизации cyNo aprioro рассогласования сигналов по методу динамического программирования.
Блок 7 управления восстановлением профиля выполняет перебор
5 точек ,2,..., и восстанавливаемого профиля и для каждой очередной точки
i перебирает возможные значения параллакса Pi в диапазоне допустимых значений Ро,.
0 каждого значения перебираются допустимые продолжения профиля, т.е. параллаксы Р.., в диапазоне допусти-мых значений . 5 Р,-.(у . По значениям i , Р , р на выходе бло5 КД 7 блок 6 адресации точек выбирает из блока 4 оперативной памяти сигналы NU,V(i-O,vti-P-),4«/(vi-P.-, V Выбранные сигналы передаются в блок 8 вычисления разностных сигналов, в котором формируются сигналы uV ( 1,1-4) и NWC -i- PI , i ) . Эти разностные сигналы передаются в блок 10 вычисления рассогласований. Одновременно по сигналам на выходе блока 7 в блок 10 из блока 9 вре5 манного запоминания передается сигнал остаточного минимального jpaccorласования . ( сигнал частот.-ной суммы рассогласований D ( Pi-) для предыдущей точки I-iпрофиля.
0 По полученные сигналам блок 10 формирует текущее значение суммарного квадратичного расзеогласования:
. л-((Л-1 5 и значение минимального локального рассогласования:
.T CPvVi
для сигналов, соответствукадих текущей паре точек 1, , i-l профиля и параллаксам Р f , PI--, для этой пары.
Параллаксы P-ij , Р характеризуют текущее продолжение лрофиля, заканчивающееся в точке i с параллаксом PI.
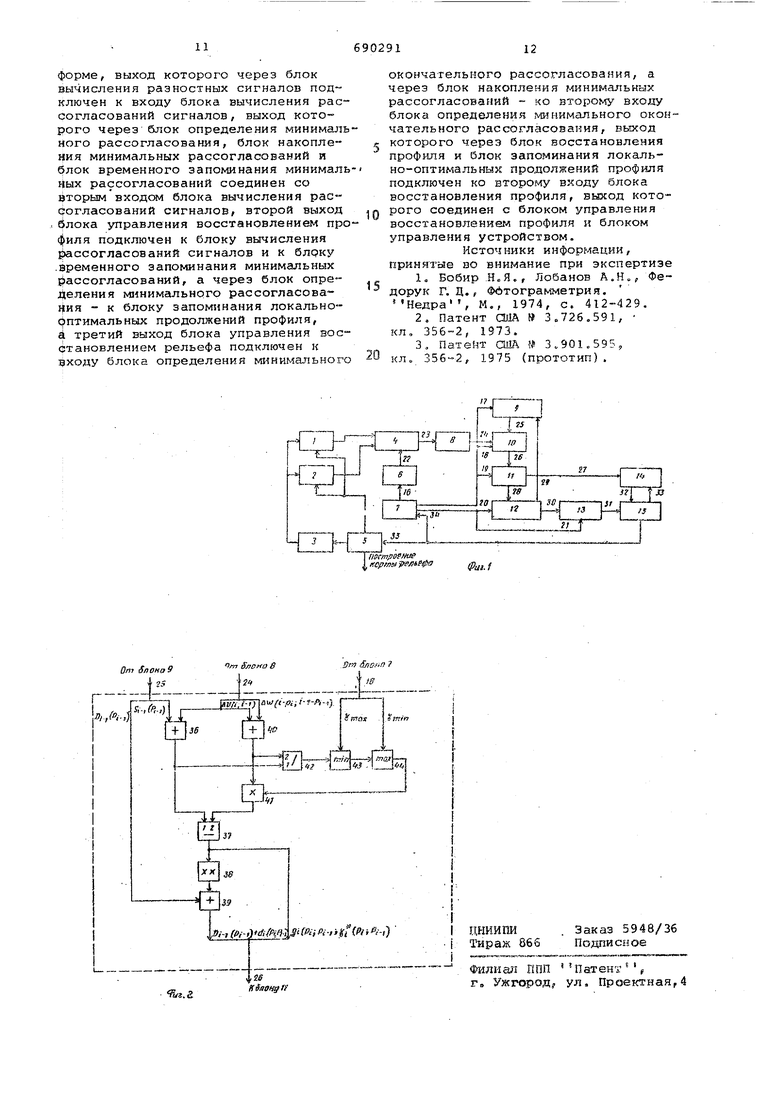
Функциональная схема одного из возможных вариантов реализации блока 10 представлена на фиг.2. Блок 36 суммирует .поступающие на него входные сигналы; блок 37 вычитает из сигнала по первому входу сигнал, поступа101ций по второму вхоМУ блок 38 возводит входной сигнал в квадрат; блоки 39 и 40 аналогичны блоку 36 (суммируют входные сигналы); блок 41 перемножает входные сигналы; блок 42 формирует частотное от делания сигнала, поступающего по первому входу, на сигнал по второму входу; блоки 43 и 44 выделяют на выходе, соответственно, наименьший и наибольший из входных сигналов. Все эти блоки 36-44 могут быть реаизованы при помЬщи стандартных ункциональных элементов аналоговой и ЦИФРОВОЙ вычислительной техники.
Выходные сигналы блока 10 поступают на вход блОка 11 определения минимального рассогласования. Под управлением блока 7 в блоке 11 для каждого значения параллакса определяется минимальная по всем. Допустимым, значениям параллакса Р,-.., сумма квадратичных 1эассОгласрваНИй л( PI) г остаточное минимальное рассогласование сигналов 5( P-j) и локально-оптимальное продолжение профиля, т.е. значение параллакса Р° (P-i) в предшествующей точке i-1 рофиля, отвечающее найденной минимальной сумме рассогласований, Сигналы D(P) и Si ( PI) заносятся в бло,к 12 накопления минимальных рассогласований, где запоминаются в позициях, соО;тветствующих Перебираемому значению параллакса Р. Значение ( ) заносится в блок 14 запоминания локально-оптимальных продолжений профиля в позицию, сответствующую текущей точке i профиля и параллаксу Р для этой точки..
; Подле перебора всех допустимых ; значений параллакса Pi Для точки i профиля величины D (Pf) и (PV)f накоплейные 6 блоке 12, передаются в блок Э для замещения находившихся там 1ранее величин В -. ( Р.;.) и Si ( P.-t) . После этого блок 7 правления переходит к очередной точке 1+1 профиля, и весь описанный цикл работы повторяется.
После Ьго, как перебор точек профиля 1S1, 2,..., VI закончен, по сигналу от блока управления 7 в блоке 13 определяется минимальное кончательное суммарное рассогласование сигналов;
В «minD (Р„-
и значение параллакса:
Р --аг М1иаз„(Р„)
п
в последней точке п восстанавливаемого профиля, отвечающее этому мй1нимуму..Параллакс PjlJ передается в блок 15 восстановления профиля, который по значениям локально-оптимальных продолжений профиля
0 запомненным в блоке 14 для всех точек 1-1,2,... п и всех допустимых значений параллаксов Р в этих точках профиля, последовательно реконструирует искомый рельеф в терминах параллаксов (Р.... Р) от конца к;началу :
p., ,%fH,-i.--.lTtr-pT-. .(p5
ВосстанОвлеМный профиль (Р,... Р) передается в блок 7 управления восстановления лрофиля для последующего использований в качестве
опорных параллаксов РО, , 1т-1,2,...ндля следующего соседнего восстанавливаемого профиля. Одновременно этот восстановленный профиль поступает в блок 5 управления устройством
для иСттользбвания при составлении цифровой карты рельефа местности.
/ХФОрмула изобретения
Устройство для автоматического восстановления рельефа местности по стереопаре аэроснимков, содержащее блок управления устройством, один выход которогх через блок управления сканированием подключен к вхолам фотоэлектрических преобразователей снимков, а Другой выход - ко вторым входам фотоэлектрических преобразователей, снимков, выходы которых подключены к блоку оперативной памяти для снимк;ов в цифровой форме,о т л и ч а К1 щ е ё с я
тем, чТо, с цельк)Пд1Вышенйя точности и помехоустойчивости восстановления рельефа, в негр введены блок . управления восстановлением профиля, блок адресации точек, блок вычисления разностных сигналов, блок временного эапоьо нания минимальных рассогласований, блок вычисления рассогласований сигналов, блок определения минимального рассогласования, блок накопления минимальных рассогласований, блок запоминания локально-оптимальных продолжений ; профиля, блок определения минимального окончательного рассогласования и блок восстановления профиля, причем выход блока управления восстановлением профиля через блок адресации точек подключен к блоку оперативной памяти для снимков в цифровой
форме, выход которого через блок вычисления разностных сигналов подключен к входу блока вычисления рассогласований сигналов, выход которого черезблок определения минимального рассогласования, блок накопления минимальных рассогласований и блойBpeRieHHoro з поминайия минималь- ных рассогласований соединен со вторымвходсж блока вычисления рассогласований сигналов, второй выход блока управления восстановлением про$иля подключей к &псЩ вычйслё;нйя рассогласований сигнгитов и к блоку : в;р1Й еййб1Ъ зйпбш на ни л мй нймал ь ных рассогласований, а через блок определения мннимгшьногр рассогласования - к блоку запоминания локальнооптимальных продолжений профиля/ а третий выход блока управления восстановлением рельефа подключен к входу блока определения минимального
окончательного рассогласования, а через блок накопления минимальных рассогласований - ко второму входу блока определения минимального окончательного рассогласования, выход которого через блок восстановления профиля и блок запоминания локально-оптимальных продолжений профиля подключен ко второму входу блока восстановления профиля, выход которого соединен с блоком управления восстановлением профиля и блоком управления устройством.
Источники информации, принятые во внимание при экспертизе
1.Бобир ., Лобанов А.Н., Федору к Г. Д , Фдтограмметрия. Недра, М., 1974, с. 412-429.
2.Патент США 3.726.591, кл. 356-2, 1973.
3.Па:твйт OiIA 3.901.595, кл. 356-2, 1975 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСТРОЕНИЯ ЦИФРОВОЙ МОДЕЛИ ПОВЕРХНОСТИ ПО ДАННЫМ КОСМИЧЕСКОЙ СТЕРЕОСЪЕМКИ | 2021 |
|
RU2778076C1 |
| СПОСОБ СОВЕРШЕНСТВОВАНИЯ ФОТОТРИАНГУЛЯЦИИ ПРИ СОЗДАНИИ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2023 |
|
RU2835990C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕК ВНЕШНЕЙ СРЕДЫ ДЛЯ ПОСТРОЕНИЯ ЕЕ ТРЕХМЕРНОЙ МОДЕЛИ В СТЕРЕОТЕЛЕВИЗИОННОЙ СИСТЕМЕ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 1993 |
|
RU2065133C1 |
| ФОТОГРАММЕТРИЧЕСКОЕ РАБОЧЕЕ МЕСТО | 2002 |
|
RU2225593C2 |
| Автоматический стереофотограмметрический прибор | 1988 |
|
SU1585683A1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ГАБАРИТНОСТИ ГРУЗА ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2019 |
|
RU2723660C1 |
| Способ автоматического создания цифровой модели местности по стереоснимкам | 1991 |
|
SU1793226A1 |
| Устройство для определения соответственных точек пары стереоизображений | 1982 |
|
SU1052868A1 |
| Устройство для графической обработки конвергентных узкоугольных снимков | 1988 |
|
SU1589060A1 |
| СПОСОБ ПОЛУЧЕНИЯ СТЕРЕОСКОПИЧЕСКИХ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ С АВТОМАТИЧЕСКИМ ИЗМЕРЕНИЕМ ПРЕДМЕТНОГО ПРОСТРАНСТВА В РЕАЛЬНОМ ВРЕМЕНИ | 2012 |
|
RU2490819C1 |
nfrmfee faP мертыуетефв
Фа1.1
