Изобретение относится к фотограмметрии.
Цель изобретения - повышение производительности за счет оптимизации времени обработки стереомодели
На фиг. 1 показана структурная схема автоматического стереофотограм метрического прибора; -на фиг. 2 - схема, поясняющая пример формирова-1 ния растра.
Прибор содержит датчик 1 координат, блок 2 записи информации, решающий блок 3,мблок 4 коррекции продольных параллаксов, коррелятор 5, генератор 6 развертки, блок 7 управления апертурой, блок 8 управления размерами развертки, блок 9 управления сканированием, блок 10 управления формо растров, блок 11 определения ха- рактерных точек рельефа, блок 12 па- -мяти, блок 13 сравнения, блок 14 управнения дополнительным сканированием, а также двухканальную систему сканирования, каждый канал которой содержит источник 15 направленного излучения, блок 16 установки апертуры, блок 17 развертки, блок 18 формирования растра, каретки 19 снимка и фотоэлектрический преобразователь 20.
Автоматический стереофотограммет- рическйй прибор работает следующим образом.
Оператор обычными приемами выполняет ориентирование стереопары снимков и внешнее ориентирование модели. Далее начинается процесс автоматического профилирования. При этом сигнал с выхода генератора 6 развертки поступает на вход блоков 18 формирования растров, где растры формируются из трех разверток: малой, средней и большой. Малая и средняя развертки обеспечивают различную подробност
0
снятия информации в окрестностях одноименных точек снимков с целью их идентификации и в зависимости от количества информации на участках этих
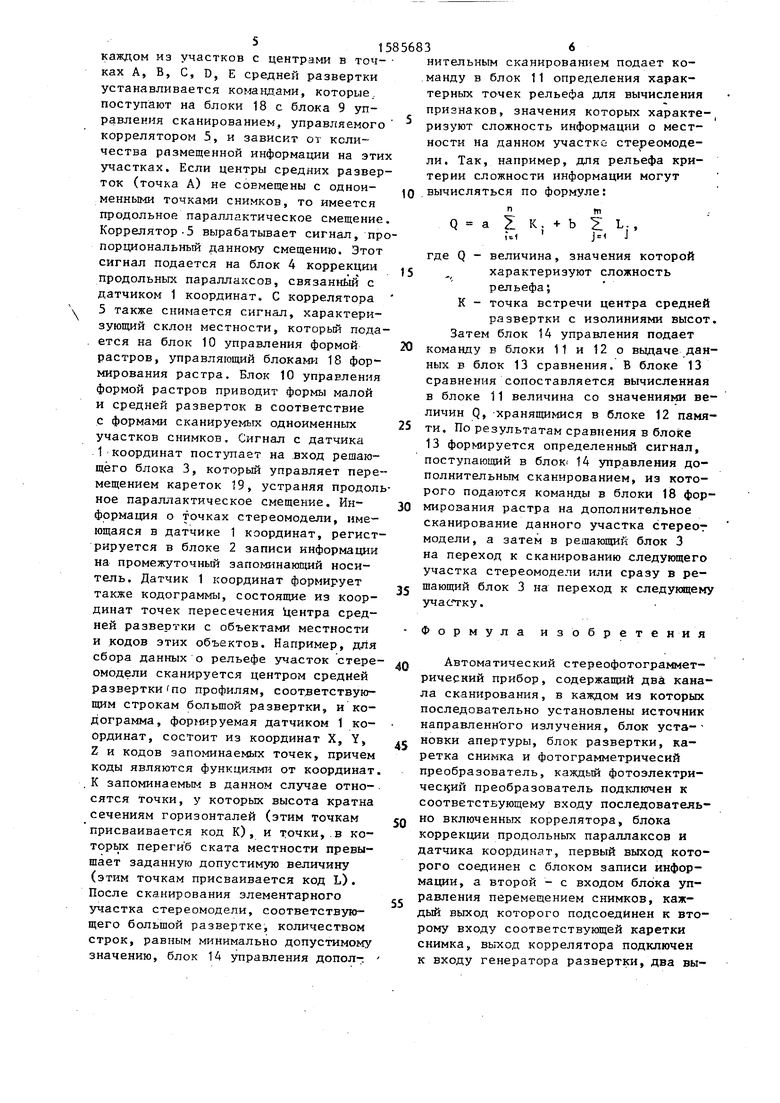
0 окрестностей. Центр средней развертки сканирует стереомодель в пределах большой развертки с целью снятия координат и кодов объектов местности. На фиг, 2 показан частный случай
5 формирования растра из трех разверток, В пределах малой развертки (квадрат с центром в одной из точек А, В, С, D или Е) световой луч перемещается, например, по сторонам, параллельным оси X прибора, а средняя развертка последовательно и циклично перемещает центр малой развертки в точки А, В, С, D, Е растра. Центр средней развертки (точка А) сканирует участок стереомодели в пределах большой развертки по строкам, параллельным оси Y прибора. Сигналы с выхода блоков 18 поступают на блоки развертки 17 и управляют их работой, Световые сигналы от блоков 17 модулируются оптическими плотностями снимков, устанавливаемых на каретках 19, и поступают на ввод фотоэлектрических преобразователей 20, а сигналы с выходов этих преобразователей поступают на вход коррелятора 5, С коррелятора 5 сигнал о степени корреляции сигналов сканирования подается на блок 7 управления апертурами, который управляет блоками 16 установки апертур, и на блок 8 управления размерами развертки, который управляет блоками 18, изменяя амплитуду малой и средней разверток. При низкой степени корреляции размеры све5 тового пятна, малой и средней раз- BepToif увеличиваются, а при высокой степени корреляции - уменьшаются. Время нахождения малой развертки в
0
5
0
каждом из участков с центрами в точ- - как А, В, С, D, Е средней развертки устанавливается команд.ами, которые, поступают на блоки 18 с блока 9 управления сканированием, управляемого коррелятором 5, и зависит от количества размещенной информации на этих участках. Если центры средних разверток (точка А) не совмещены с одноименными точками снимков, то имеется продольное параллактическое смещение. Коррелятор-5 вырабатывает сигнал, пропорциональный данному смещению. Этот сигнал подается на блок 4 коррекции продольных параллаксов, связанный с датчиком 1 координат. С коррелятора 5 также снимается сигнал, характеризующий склон местности, который подается на блок 10 управления формой растров, управляющий блоками 18 формирования растра. Блок 10 управления формой растров приводит формы малой и средней разверток в соответствие с формами сканируемых одноименных участков снимков. Сигнал с датчика 1 координат поступает на вход решающего блока 3, который управляет перемещением кареток 19, устраняя продоль ное параллактическое смещение. Информация о точках стереомодели, имеющаяся в датчике 1 координат, регистрируется в блоке 2 записи информации на промежуточньй запоминаюпщй носитель. Датчик 1 координат формирует также кодограммы, состоящие из координат точек пересечения i eHTpa средней развертки с объектами местности и кодов этих объектов. Например, для сбора данных о рельефе участок стереомодели сканируется центром средней развертки по профилям, соот етствую- щим строкам большой развертки, и кодограмма, формируемая датчиком 1 координат, состоит из координат X, Y, Z и кодов запоминаемых точек, причем коды являются функциями от координат. . К запоминаемым в данном случае отно- . сятся точки, у которых высота кратна сечениям горизонталей (этим точкам присваивается код К), и точки,.в которых переги б ската местности превышает заданную допустимую величину (этим точкам присваивается код L). После сканирования элементарного участка стереомодели, соответствующего большой развертке, количеством строк, равным минимально допустимому значению, блок 14 управления допел-,
158
1585683
нигельным сканированием подает команду в блок 11 определения характерных тачек рельефа для вычисления признаков, значения которых характе-, ризуют сложность информации о местности на данном участке стереомодели. Так, например, для рельефа критерии сложности информации могут Q .вычисляться по формуле:
m Q а Z К + b L.,
Uf J J
где Q - величина, значения которой 5 ,, характеризуют сложность
рельефа;
К - точка встречи центра средней развертки с изолиниями высот. Затем блок 14 управления подает 0 команду в блоки 11 и 12 о выдаче данных в блок 13 сравнения. В блоке 13 сравнения сопоставляется вычисленная в блоке 11 величина со значенияьм величин Q, хранящимися в блоке 12 памяти. По результатам сравнения в блоке 13 формируется определенный сигнал, поступающий в блок 14 управления дополнительным сканированием, из которого подаются команды в блоки 18 фор- 0 мирования растра на дополнительное сканирование данного участка стереот модели, а затем в решающий блок 3 на переход к сканированию следующего участка стереомодели или сразу в решающий блок участку.
5
5
3 на переход к следукяцему
0
5
0
5
Формула изобретения
Автоматический стереофотограммет- ричеений прибор, содержащий два канала сканирования, в каждом из которых последовательно установлены источник направленн ого излучения, блок уста- новки апертуры, блок развертки, каретка снимка и фотограмметричесий преобразователь, каждый фотоэлектри- чес15ий преобразователь подключен к соответствующему входу последовательно включенных коррелятора, блока коррекции продольных параллаксов и датчика координат, первый выход которого соединен с блоком записи информации, а второй - с входом блока управления перемещением снимков, каждый выход которого подсоединен к второму входу соответствующей каретки снимка, выход коррелятора подключен к входу генератора развертки, два выкода которого соединены с первыми входами блоков формирования растров, выходы которых подключены к вторым входам соответствующих блоков развертки, выход коррелятора соединен с параллельно включенными блоком управления формой растра, блоком управления сканированием, блоком управле- нид размером развертки и блоком управления апертурой, выход которого соединен с вторыми входами блоков установки апертур, а выходы блока управления формой растров, блока управления размером развертки и блока управления сканированием подключены соответственно к второму, третьему и четвертому входам блоков формирования растров, отличающий- G я тем, что, с целью повышения производительности за счет уменьшения затрат времени на обработку стерео- модели, в него введен блок определе
ния характерных точек рельефа, блок памяти, блок сравнения и блок управления дополнительным сканированием, причем третий выход датчика координат связан с входом блока ойределения характерных точек рельефа, выход которого связан с первым входом блока сравнения, выход которого подключен к входу блока управления дополнительным сканированием, первый выход которого связан с блоком памяти, выход которого подключен к второму входу блока сравнения, второй выход блока управления дополнительным сканированием связан с пятыми входами блоков формирования растров и вторым входом блока управления .перемещение м снимков,, а третий выход блока управления дополнительньм сканиро ванием связан с вторым входом блока определения характерных точек рельефа.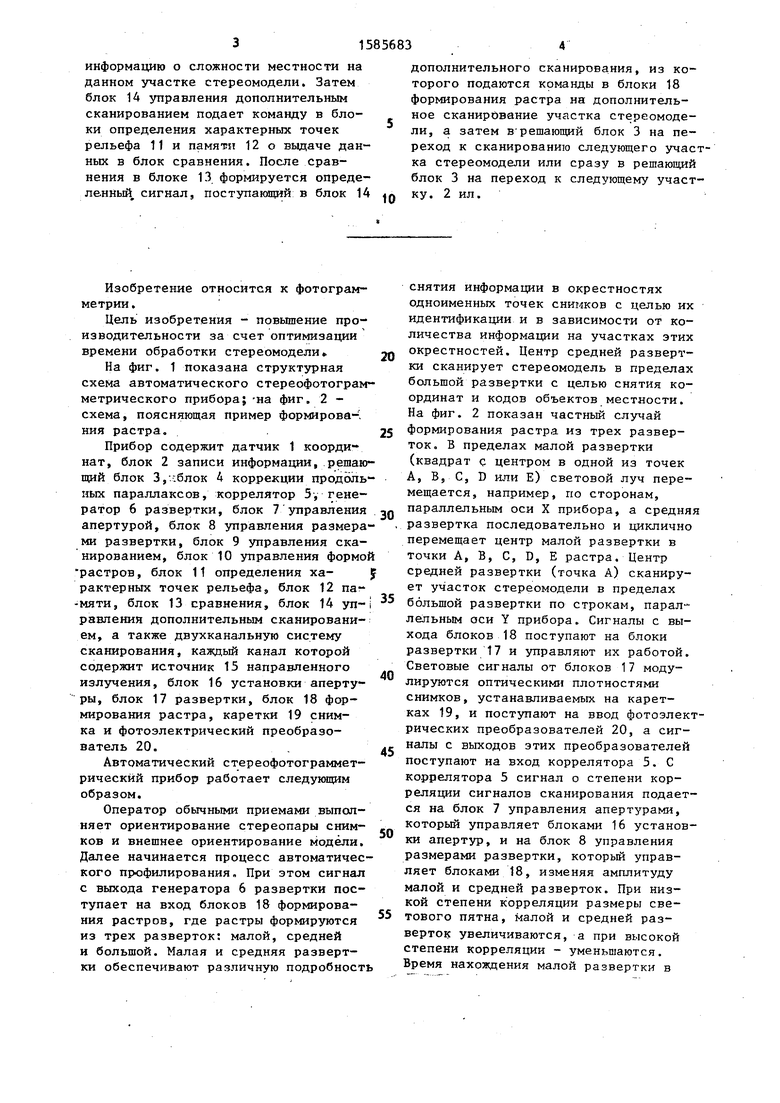
| название | год | авторы | номер документа |
|---|---|---|---|
| Аналитический стереофотограмметрический прибор | 1980 |
|
SU932232A1 |
| Автоматический универсальный стереофотограмметрический прибор | 1973 |
|
SU507774A1 |
| Автоматический стереофотограмметрический прибор | 1977 |
|
SU711356A1 |
| Автоматический стереофотограмметрический прибор | 1976 |
|
SU602778A1 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ИЗГОТОВЛЕНИЯ ЦИФРОВЫХ ПЛАНОВ И КАРТ | 2007 |
|
RU2371768C2 |
| Автоматический стереофотограмметрический прибор | 1976 |
|
SU632901A1 |
| СПОСОБ ПОЛУЧЕНИЯ НЕПРЕРЫВНОГО СТЕРЕОИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2024 |
|
RU2832645C1 |
| АНАЛИТИЧЕСКИЙ ФОТОКАРТОГРАФ ДЛЯ СОСТАВЛЕНИЯ ФОТОКАРТ ПО СТЕРЕОСКОПИЧЕСКИМ СНИМКАМ | 1970 |
|
SU285256A1 |
| Устройство для считывания изображения со снимков | 1982 |
|
SU1081416A1 |
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1993 |
|
RU2098758C1 |

Изобретение относится к фотограмметрии и позволяет повысить производительность автоматических стереофотограмметрических приборов за счет уменьшения затрат времени на обработку стереомодели. Для этого после сканирования элементарного участка блок 14 управления дополнительным сканированием подает команду в блок 11 определения характерных точек рельефа, который вырабатывает информацию о сложности местности на данном участке стереомодели. Затем блок 14 управления дополнительным сканированием подает команду в блоки определения характерных точек рельефа 11 и памяти 12 о выдаче данных в блок сравнения. После сравнения в блоке 13 формируется определенный сигнал, поступающий в блок 14 дополнительного сканирования, из которого подаются команды в блоки 18 формирования растра на дополнительное сканирование участка стереомодели, а затем в решающий блок 3 на переход к сканированию следующего участка стереомодели или сразу в решающий блок 3 на переход к следующему участку. 2 ил.
| Стереофотограмметрический прибор Гештальт Фотомапер GMP-П (Канада) ; Экспресс-информация / ОНТИ ЦНИИГАиК | |||
| Сер | |||
| аэрофотогеодезическая, 1977, вып | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
