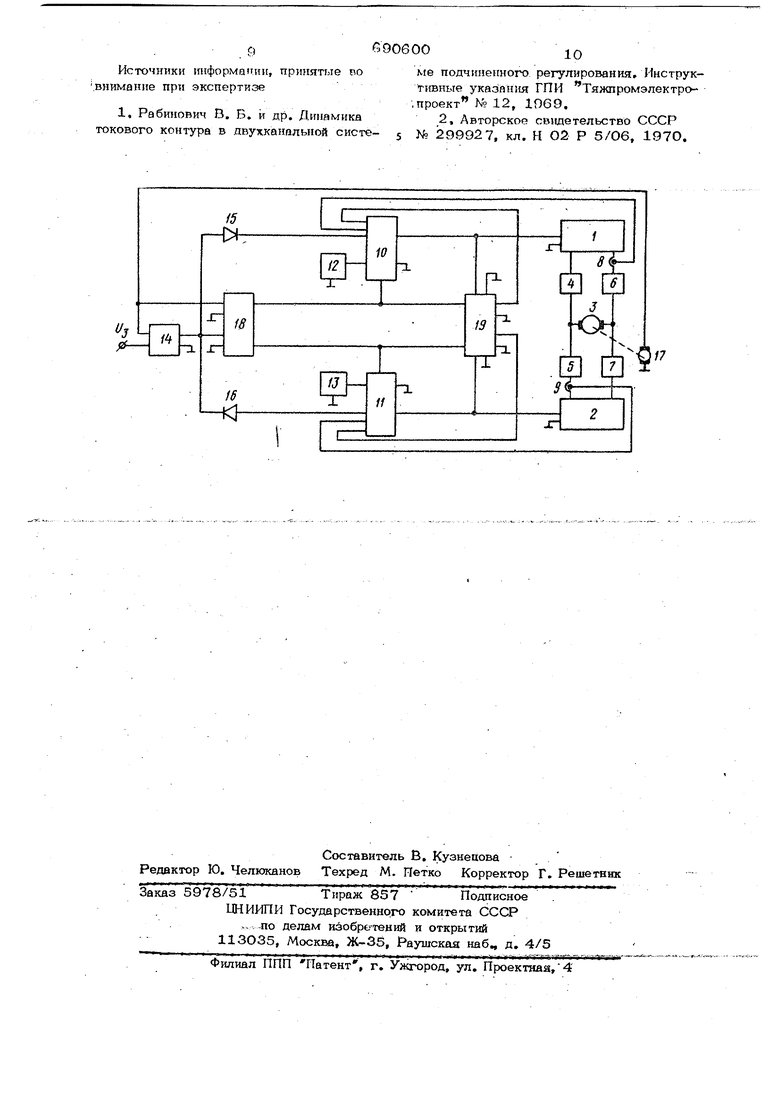
изводаой выходйого сигнала задатчика рабочего тока на вхол регулятора тока нерабочего комплекта и вызывает увеличение сЦ Такое увеличение Ok 2, оправдаш только в том случае, если уменьшение Л- под действием вызсодиого сигнала задатчика рабочего тока пртгоодит к уменьшению величины dv.i+ck ниже 180 . В иных случаях уменьшение cJ нежелательно, так как приводит к нестабильности ра боты контура, вызванной переходным процессом в контуре регулирования уравнительного тока, что приводит к несоответствию действительной величины И заданной. Кроме того, в устройстве, описанном в 1.2J, законы регулирования (ПИзакон) и настройки регуляторов выбираютсл для режима регулирования рабочего тока и остаются неизменными для режима регулирования урав ительного тока, что не позволяет обеспечить хорошую данамику контура регулирования уравнительного тока. Целью данного изобретения является .улучшение стабильности работы и динамики контура регулирования уравнительного тока.. Для этого в устройство для управления реверсивным вентильным электроприводом постоянного тока с уравнительными реакторами, содержащее два комплекта вентильных преобразователей с пропор ционально-интегральными регуляторами тока, к входам которых подключены датчики тока, индивидуальною задатчики урав нительного тока и через разделительные диоды общий задатчик рабочего тока, бло фиксации нерабочего комплекта вентилей, введен логический блок, входы которого соединены с вызгрдами блока фиксации и с выходами регуляторов тока, а входы подключены к входам регуляторов тока. Такое вьгаолнение устройства позволяет за счет исключения конденсаторов, шунтирующих разделительные диоды, избавиться от влияния выходного напряжения задатчика рабочего тока, вносящего возму щающие воздействия на контур регулирования уравнительного тока в периоды, когда 0 + 18О , т. е. избавиться от нежелательных воздействий и тем самым улуч- шить стабильность работы контура регули.рования тока. Дополнительное введение логического блока, формирующего сигналы коррек- (НИИ, позволяет улучшить динамику кон(тура регулирования уравнительного TOica. Цействительно, в прототипе при уменьшении угла управления, например обусловленного изменением статического момента, .увеличивается уравнительный ток, который, воздействуя по цепи обратни -.вязи на регулятор тока, вызывает соответ ствующее изменение выходного напряже-; ния регулятора, направленное на стабилизацию уравнительного тока, изменение выходного напряжения регулятора тока происходит после увеличения уравнительного тока, т. е. уже после появления броска (перерегулирования) в уравнительном токе. В предлагаемом устройстве логическое устройство анализирует величины углов , cS 3L Ь как только наруша .; ется условие с(ч -f-Ovj 180 , оно воздействует на соответствующий регулятор тока, вызывая изменений напряжения на его выходе, тем самым противодействует (аннулирует) появлению бросков уравнительного тока. Устройство содержит комплекты 1-2 ветнильных преобразователей, соединенных по схеме, обеспечивающей реверсирование тока в якоре двигателя 3 и содержащей уравнительные реакторы 4-7, датчики в-9 тока, включенные в соответствукк щие выходы комплектов 1-2 вентильных преобразователей, например, в положительные, регуляторы 10, 11 тока, обеспечивающие соответственно регулирование токов комплектов 1, 2 вентильных преобразователей, задатчики 12-13, уравнительного тока, задатчик 14 рабочего тока (регулятор скорости), разделительные диоды 15-16, тахогенератор 17, блок 18 фиксации нерабочего комплекта вентилей, обеспечивающий изменение закона регулирования регулятора при переходе к регулированию уравнительного тока, и наоборот, логический блок 19. Логический блок 19 предназначен для формирования корректирующих сигналов, поступающих на первые входы регуляторов 1О-11 и обеспечивающих увеличение сигнала на их выходах как только dч + + . Сигнал на первом выходе логического блока 19, соединенном с первым входом регулятора 10, появляется при условии с ц + , когда на его первом входе, соединенном со входом перестройки регулятора 10, имеется сигнал, поступающ1й с первого выхода блока 18. Сигнал на впэром выходе логического блока 19, соединенном с первым входом -регулятора 11, появляется при условии (SH+ , когда на его втором входе. соединенном со BxonoNf перестройки регулятора 11, имеется сигнал, 1юступак щий со второго выхода блока 18. Информа,ция.о величинах йц, ck 2 поступает соответ ственно на третий и четвертый входы логического блока 19 с выходом регуляторов 1О-11. Корректируглшй , постуттаЮЩИЙ с выходов логического блока 19, имеет вид дельта-функции или импульса, близкого по своим свойствам к дельтафункции. Мощность этого импульса выбирается таким образом, чтобы под действием последнего выходной сигнал регулятора увеличивался на величину, достаточйую для предупреждения появления броска (перерегулирования) в уравнительгг ном токе. В общем случае моидность импульса является функцией угла управления. Блок 18 обеспечивает изменение закона регулирования регулятора при переходе последнего к регулированию уравнительного тока и наоборот.Перестройка ре гулятора тока может осуществляться,.например с помощью управляемых ключей, находящихся в составе регулятора и управляемых выходными сигналами блока ll8. Законы регулирования регуляторов зависят от параметров силовой цепи вентильного преобразователя и характера регулирования рабочего и уравнительного токов. Например, регулятор тока може иметь ПИ-закон для: . рабочего тока и И-закон для уравнительного. Блок 18 обеспечивает на своем первом выходе, соединенном со входом перестройки регулятора 10, сигнал, если на-его первом входе, соединенном с выходом регулятор скорости 14, появляется, напрамер, отри цательный сигнал. Если на первый вход блока 18 поступает положительный сигна то сигнал появляется на втором выходе, соединенном со. входом перестройки регулятора 11. Второй вход блока 18 соединен с выходом тахогеиератора 17 и с первым входом регулятора скорости, на второй вход которого поступает сигнал задания CKOJDOCTH U ,. На обоих выходах блока 18 появляются сигналы, если на его обоих входах сигналы отсутствуют. Статическое состояние устройства характеризуется тем, что регулятор 10 тока обеспечивает заданный уровень, например, рабочего тока, поступающрй на третий вход регулятора 10 через разделительный диод 15 с выхода регулятора 4 скорости.
wOeOO Это обеспечивается благодаря тому, что выход регулятора 1О тока соединен с управляющим входом комплекта 1, второй вход регулятора 10 соединен с выходом датчика 8 тока, четвертый вход регулятора ГО соединен с выходом задат чика 12 уравнительного тока. Регулятор 11 тока обеспечивает заданный уровень уравнительного тока, поступающий на че- вертьгй вход регулятора 11 с выхода задатчика 13 уравнительного тока. Это обеспечивается благодаря тому, то выход регулятора 11 тока соединен с управляющим входом комплекта 2, второй вход регулятора 11 соединен с выходом датчика 9 тока, третий вход регулятора 11 через разделительньй диод 16 соединен с выходом регулятора 14 скорости. В указанном статическом состоянии сигналы на выходе логического блока 19 равны нулю. Сигнал на выходе регулятора скорости положительный, следовательно, сигнал на первом выходе блока 18 отсутствует, обеспечивая регулятору 10 тока, например, ПИ закон. Сигнал на втором вы;ходе блока 18 присутствует и обеспечивает регулятору 11 тока, например, Изакон. Последовательность работы и порядок прохождения сигналов в устройстве рас.смотрим на примере пуска двигателя от .исходного состояния, соответствующего нулевой скорости, до некоторой заданной величины и затем торможения до нулевой скорости. В исходном состоянии УЗ и выходкой сигнал тахогенератора равны нулю, поэтому на обоих выходах блока 18 имеются сигналы. В этом состоянии оба комплек,та преобразователя вместе со своими регуляторами участвуют в регулировании уравнительного тока, поддерживая его на заданном задатчиками 12, 13 уровне. После появления сигнала U j на выходе, регулятора 14 скорости появляется сигнал, допустим, положительный, который поступает через разделительный диод 15 на третий вход регулятора 10 и на первый вход блока 18. На первом выходе блока 18 сигнал исчезает, регулятор 1О перестраивается на режим регулирования рабочего тока и обеспечивает поддержание, заданного регулятором скорости 14, уровня рабочего тока, разгоняя дв1Патель до заданной скорости. Второй комплект со своим регулятором работают в режиме. регулирован1ш уравнительного тока. В процессе разгона угол управления C уменьшается, что приводит к нарушени условия .В момент нарушения со второго выхода логического бло ка 19 на первый вход регулятора 11 пос тупает импульсный сигнал, который увеличивает уголсИ,2, обеспечивая сохранение указанного условия, что предотвращает появление бросков уравнительного тока. И так происходит всякий раз, когда наступае.т нарушение условия в процессе раз гона двигателя. ; При снятии сигнала Us ьтходное напряжение регулятора скорости изменяет свой знак под действием напряжения обратной связи, поступак)щего с тахогенератора 17, Появляется сигнал на первом выходе и исчезает со второго выхода блока 18. Регулятор 10 тока перестраивается на режим регулирования уравнительного тока и обеспечивает поддержание заданного задатчиком 12 значения уравнительного тока. Регулятор 11 тока перестраивается на режим регулирования рабочего тока и обеспечивает поддержание, заданного регулятором 14 скорости, уровня рабочего тока, тормозя двигатель до нулевой скорости. В процессе торможения угол сЯ умень шлется, что П1эиводит к наруц1ению услови d н + (2.180 . В момент нарушения УСЛОВИЯ с первого выхода логического блок 19 на первьй вход регулятора 1О поступает импульсный сигнал, который увеличивает УГОЛС Н обеспечивая сохранение указанного условия, что предотвращает появление бросков уравнительного тока. Итак происходит всякий раз, когда наступает нарушение условия в процессе торможения. После того, как двигатель затормозится до нулевой скорости, сигналы на выходах регулятора скорости и тахогенератора 17 становятся равными нулю, иг устройствб возвращается в исходное состояние, В прототипе C lрегулятор тока под вергается воздействию со стороны регу- лятора скорости через емкость, шунтирую шую разделительный диод, при любом йэменении выходного напряжения регулятора скорости. В данном устройстве логический блок 19 вступает в работу (вырабатывает корректирующие сигналы) тол ко в моменты нарушения условия сКЧ + , вызывающего броски уравнительного тока. Следовательно, в данном устройстве устраняется нежелательное влияние выходного напряжения регулятора скорости, что повышает стабильность работы контура регулирования уравнительного тока. Кроме того, в прототипе регулирование уравнительного тока ведется в основном по цепи обратной связи, т. е. сначала возникает.под действием возмущающего воздействия перерегулирование (провалы) в уравнительном токе, а затем происходит соответствующее изменение выходного напряжения регулятора тока, устраняющее вознк-кшее нероответствие (перерегулиро,вание, провалы) заданному уровню тока, :В данном устройстве логический блок анализирует с.остояние (величины) углов управления и воздействует на выходное напряжение регулятора тока, не дожидаясь появления бросков уравнительного i тока, тем самым резко уменьшается влияние возмущающего воздействия йа ура&нительный ток. В данном случае наблк даются незначительные отклонения в уравнительном токе, которые ликвидируются за счет действия цепи обратной связи по току.. , . Предлагаемое устройство обеспечивает .улучшение динамики. Устройство легко реализуется на элементах унифицированных блоков УБСР, УБСР-Д. Формула изобретения Устройство для управления реверсивНЬ1М вентильным электроприводом посто-. Я11ного тока с уравнительными реакторами, содержащее два комплекта вентильных преобразователей с пропорционально ; интегральными регуляторами тока, к входам которых пошслючены датчики тока, индивидуальные задатчики уравнительного тока и через разделительные диоды общий заДатчик рабочего тока, блок фиксации нерабочего комплекта вентилей, отличающееся тем, что, с цельк улучшения стабильности работы и динамики контура регулирования ; авнительного тока, дополнительно содержит логический ёлок, входы которого соединены с выходами блока фиксации и с выходами регуляторов тока, а входы подключены к входам регуляторов тока.
9в90600
Источники информации, принятые воме подчиненного регулирования, Ннструк.внимание при экспертизетивные указания ГПИ Тяжпроктэлектро1. Рабинович В. ГЗ. и др. Ди ш fикa2, Авторское сввдетельство СССР
токового контура в двухканальной систе- 5 № 299927, кл. Н О2 Р 5/06, 1970.
,проект N9 12, 1069.

| название | год | авторы | номер документа |
|---|---|---|---|
| РЕВЕРСИВНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1971 |
|
SU299927A1 |
| РЕВЕРСИВНЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД | 1992 |
|
RU2079963C1 |
| Устройство для управления электроприводом поворота одноковшового экскаватора | 1980 |
|
SU907178A1 |
| Способ регулирования уравнительногоТОКА B РЕВЕРСиВНОМ ВЕНТильНОМпРЕОбРАзОВАТЕлЕ | 1973 |
|
SU809458A1 |
| РЕВЕРСИВНЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2103797C1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Система автоматического управления для вентильного электропривода | 1972 |
|
SU729799A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| Реверсивный тиристорный электропривод постоянного тока | 1980 |
|
SU951614A1 |
| Устройство для управления двумя комплектами вентилей мостовых тиристорных преобразователей тока,включенных по встречно-параллельной схеме | 1979 |
|
SU1018188A1 |
